| Issue |
A&A
Volume 679, November 2023
Solar Orbiter First Results (Nominal Mission Phase)
|
|
|---|---|---|
| Article Number | A149 | |
| Number of page(s) | 13 | |
| Section | The Sun and the Heliosphere | |
| DOI | https://doi.org/10.1051/0004-6361/202346907 | |
| Published online | 30 November 2023 | |
SoloHI observations of coronal mass ejections observed by multiple spacecraft⋆
1
U.S. Naval Research Laboratory, Washington D.C., USA
e-mail: This email address is being protected from spambots. You need JavaScript enabled to view it.
2
Johns Hopkins University Applied Physics Laboratory, Laurel, MD, USA
Received:
15
May
2023
Accepted:
29
September
2023
Abstract
Context. The Solar Orbiter Heliospheric Imager (SoloHI) instrument of the Solar Orbiter mission is a next-generation heliospheric imager. New observations from SoloHI demonstrate the improved spatial and temporal resolution compared to previous observations of the heliosphere and corona. At perihelion, the field of view (FoV) of SoloHI covers the transition between the coronagraph (COR2) and heliospheric imager (HI1) Sun-Earth Connection Coronal and Heliospheric Investigation (SECCHI) suite. In this paper, we focus on an active solar period following the first Solar Orbiter science perihelion that resulted in a number of well-observed large coronal mass ejections (CMEs) in SoloHI data in March and April 2022. Specifically, we highlight a series of events produced by AR12795 between 28 March and 2 April and show overlapping observations with SECCHI/COR2 and HI1 and LASCO/C3.
Aims. We compare the performance of the SoloHI instrument against similar observations from 1 au imagers. We describe CME observations, highlighting the unique structural features captured within the SoloHI FoV. These observations demonstrate that SoloHI will provide new insights into CME morphology and evolution from a unique vantage point.
Methods. To provide a direct and relevant comparison, images from all the telescopes we used in the paper are presented in FoVs common to each and with minimal processing applied. The J-maps we used to highlight outflowing features are also presented to show that the CME kinematics can be tracked through the SoloHI FoV, and also to report how the rest of the Heliophysics Systems Observatory (HSO) can be used to support the SoloHI data.
Results. The high-resolution SoloHI images of these eruptions, taken from ∼0.3 au, reveal a number of detailed structural CME features, including internal cavities or cores of the CME flux rope(s). They also show the surrounding material and associated sheath region of the compressed upstream solar wind plasma. Many features that could not have been observed by other instruments are highlighted and discussed.
Conclusions. The SoloHI instrument is performing well and has already provided detailed observations of CMEs that can help us understand the details of the internal structure and magnetic field of CMEs. These new observations in combination with synoptic observations from 1 au offer new opportunities for CME propagation from the corona to the heliosphere.
Key words: Sun: coronal mass ejections (CMEs) / solar wind / Sun: heliosphere
Movies associated to Figs. 4, 5, 8, 11, and 12 are available at https://www.aanda.org.
© The Authors 2023
 Open Access article, published by EDP Sciences, under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Open Access article, published by EDP Sciences, under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This article is published in open access under the Subscribe to Open model. This email address is being protected from spambots. You need JavaScript enabled to view it. to support open access publication.
1. Introduction
The Solar Orbiter Heliospheric Imager (SoloHI; Howard et al. 2020) was launched on board the Solar Orbiter (Müller et al. 2020; García Marirrodriga et al. 2021) spacecraft in February 2020. Solar Orbiter is an international collaboration between ESA and NASA. Its ten instruments are designed to explore the Sun and inner heliosphere. Since its launch, Solar Orbiter has performed several gravity-assist maneuvers to place the spacecraft into an elliptical orbit with an approximately six-month period. As the mission progresses, continued gravity-assist maneuvers will elevate the spacecraft orbit out of the ecliptic by 33° to observe the solar polar region.
As part of Solar Orbiter, SoloHI is designed to address the key science questions of the mission as defined by Müller et al. (2020). The Solar Orbiter science payload includes both heliospheric in situ and solar remote-sensing instruments. SoloHI is part of the remote-sensing (RS) suite of six instruments that image the solar atmosphere in a variety of wavelengths and fields of view (FoV). The primary science observations of the Solar Orbiter RS instruments are centered around the spacecraft perihelion in remote-sensing windows (RSWs). After the initial cruise phase of the mission, the first Solar Orbiter RSWs during the science phase of the mission were ∼30 days around the 2022 March 26 perihelion.
At launch, the SoloHI optical system and baffles were protected by a door. This door was opened in June 2020. While the mission was in its cruise phase, the instrument observed in short, sporadic periods. These images allowed us to confirm the nominal operations of the instrument and were mainly designed for calibration purposes. CMEs were visible in the SoloHI FoV, however, and in the other remote-sensing instruments (Andretta et al. 2021; Bemporad et al. 2022). These studies are in combination with other Solar Orbiter RS instruments such as the Extreme Ultraviolet Imager (EUI; Rochus et al. 2020) and the Metis coronagraph (Antonucci et al. 2020), which allow imaging of CMEs from the very low corona near the Sun out into the heliosphere. SoloHI, along with other RS instruments, also takes synoptic observations outside of the RSWs.
Solar activity increased as the mission entered the science phase in November 2021. A number of CMEs and solar outflows of different sizes and speeds were seen during the first RSWs in March and April 2022. In this paper, we focus on the subsection of these events that were produced by the single active region AR12795 between 28 March and 2 April. These events were clearly observed by Solar Orbiter and by remote-sensing instruments on other spacecraft.
Focusing on the SoloHI observations for these events, we highlight the high spatial and temporal resolution imaging provided by SoloHI, and we compare these images to those of other observers at 1 au. We also demonstrate how SoloHI can be used to address the key mission questions of the propagation and evolution of CMEs in the heliosphere.
SoloHI observes the solar corona and heliosphere in white light at a typical angular range of approximately (5° −45°) degrees from Sun center. SoloHI observes in the antiram direction, off the east limb of the Sun relative to the spacecraft motion vector. To prevent light from the solar disk from entering the optical system, SoloHI is mounted on the spacecraft in the shadow of the solar heat shield, and a series of baffles block scattered light from the Sun. The optical imaging system is a single telescope with a wide-angle lens assembly and detector. The SoloHI detector is an active-pixel sensor (APS) composed of four 2048 × 1920 pixel tiles that are combined within a single detector.
SoloHI is similar to the Heliospheric Imagers (HI; Eyles et al. 2009) of the Sun-Earth Connection Coronal and Heliospheric Investigation (SECCHI) suite (Howard et al. 2008) on board the Solar TErrestrial RElations Observatory (STEREO) spacecraft (Kaiser et al. 2008). This mission was comprised of two spacecraft, Ahead and Behind, of which Ahead remains operational. SoloHI, along with the Wide-Field Imager for Solar Probe (WISPR; Vourlidas et al. 2016) on the Parker Solar Probe (PSP; Fox et al. 2016), is the next generation of heliospheric imagers, which were intended to build upon the success of STEREO/HI.
SoloHI and WISPR were designed and built in parallel and share many common features. The angular plate scale of SoloHI is similar to that of SECCHI/HI1 (both are about 36 arcsec per pixel), while WISPR-I has about half the angular resolution. However, SoloHI and WISPR have a significant advantage from the orbits of their respective observing platforms with extended observing periods inside 1 au. Positioning the detectors closer to the Sun leads to a higher absolute spatial resolution and to shorter required exposure times to achieve the desired signal-to-noise ratio.
These improved observing conditions reduce the blur of physical features within images and allow a higher resolution of structures within faster-moving events. The typical exposure times and cadence for currently operating heliospheric imagers and coronagraphs are listed in Table 1. As a result of the encounter-based mission designs of Solar Orbiter and PSP, SoloHI and WISPR data are at a higher temporal cadence within selected observational periods, but offer a lower orbital coverage compared to STEREO/HI, which provides consistent synoptic observations.
Instrument comparison.
In Table 1, the observing locations and corresponding details for WISPR and SoloHI are based on the closest planned perihelia and on the outer ranges of nominal observing periods to provide a full scope of the observational details. Because the orbits of both missions are highly elliptical, the heliocentric distance will vary. The images are typically sums of multiple exposures, and the exposure times given are the total times for a single file.
STEREO/HI and PSP/WISPR comprise multiple telescopes to achieve large angular FoVs. SoloHI is a single wide-angle telescope consisting of multiple tiles. The total FoV of SoloHI is most similar in coverage to STEREO/HI1 and PSP/WISPR-I. SoloHI is a heliospheric imager due to its linear baffle design, but around perihelion, its FoV overlaps with those of SOHO/LASCO (Brueckner et al. 1995) and the SECCHI coronagraph (COR2). The SoloHI observations at these heights provide a key bridge between previous coronagraph and heliospheric imager observation regions. The FoVs and detector sizes of these instruments are compared in Table 1.
A key difference between SoloHI and WISPR that should be noted is that while the instruments themselves are very similar, the spacecraft on which each resides have different orbits. The highly elliptical PSP orbit allows WISPR to observe heights inside the SoloHI FoV at even closer distances, although this difference is somewhat mitigated by SoloHI being pointed closer to the solar limb. The drawback of this orbit from an imaging standpoint is the increased velocity of the spacecraft. The PSP orbit makes it extremely challenging to distinguish the physical motion of outward-moving features and the apparent motion caused by the spacecraft flying toward or away from a stationary feature. The less elliptical orbit of Solar Orbiter means that this apparent motion is less of a concern for SoloHI than in WISPR. In the time it typically takes for a CME to cross the entire FoV of SoloHI (ranging from a few hours to a day), the spacecraft moves only a few degrees in longitude, even at perihelion, and it can typically be assumed to be quasi-stationary over a limited time.
An example SoloHI mosaic image from the four tiles is presented in Fig. 1. These images were taken near perihelion over a total span of 24 min. Each tile was exposed separately and was combined on the ground to form the full mosaic. These are Level 2 (L2) images, where each image has been corrected for the detector bias, normalized by the exposure time, and converted into units of mean solar brightness (MSB). A paper explaining this process is being prepared. The general process is similar to that used to calibrate WISPR images to Level 2 (Hess et al. 2021).
 |
Fig. 1. Mosaic of the four SoloHI tiles taken around the Solar Orbiter science perihelion. The tiles are individually labeled with the start time of each observation. The inner FoV is dominated by the linear straylight pattern from the instrument baffles and oblong-shaped F-corona. The cross-like pattern in the image is caused by the physical gaps on the detector between tile boundaries. A grid of the HPC coordinates is overlaid on the image. The sign of the elongation (x-coordinate) is negative because the FoV is in the anti-ram direction of the spacecraft. |
The Sun is to the right of the SoloHI image, and outflowing solar material traverses the FoV from right to left. Typically, the star field will go in the opposite direction, from left to right. Like prior white-light observations of the corona and heliosphere, the signal in a SoloHI image is a combination of the stable dust-based F-corona (Lamy et al. 2022) and Thomson-scattered light from the K-corona (Vourlidas & Howard 2006), which includes the solar transient features relevant to the first four science questions listed above. The signal in these L2 images is dominated by the F-corona, which is orders of magnitude brighter than the K-corona in the corona (Lamy et al. 2021) at these heights. The bright bulge in the inner part of the FoV is the shape of the F-corona.
A noticeable feature in Fig. 1 unique to SoloHI is the dark cross pattern that cuts through the center of the image. These are the boundaries between the individual tiles of the detector and represent the physical distance between tiles on the detector. Thus, they are a permanent feature of the combined SoloHI mosaic. Another feature unique to SoloHI is the bright rectangular band that can be seen at the edge of the image closer to the Sun. This arises because scattered light from the solar arrays is reflected off the back of the forward baffle and onto the detector. The amount of straylight in the region of tiles 1 and 2 varies according to the typical intensity, based on the angle of the solar arrays with the Sun that changes step-wise with the heliocentric distance of the spacecraft. While increasing the noise in this region, the straylight can still typically be removed and does not prevent the imaging of transient solar features. However, the additional signal can cause particularly bright structures in this region to saturate the detector.
There is some additional straylight around the borders of the image, caused by a reflection off the housing of the detector. This is less obvious in Fig. 1, but is still present. No strong straylight dependence on spacecraft distance or solar array has been observed outside the baffle region, and any or nearly all straylight will be removed along with the F-corona when the images are processed to reveal a transient structure.
The simplest way to remove the F-corona, either a standard running-difference or ratio technique, subtracting or dividing a previous image to highlight moving features, has been used for many generations of white-light imagers, including all those listed in Table 1. More advanced processing methods to remove the F-corona have been developed for use with WISPR images (Howard et al. 2022; Liewer et al. 2023). These techniques are necessary for WISPR given the rapid change in the scene of the images due to the high velocity of the spacecraft near perihelion. However, because the motion of Solar Orbiter is more gradual, these advanced processing techniques are less crucial, and running-difference techniques allow a stable viewing of transient structures.
To demonstrate this, we can compare the Solar Orbiter motion during the first science perihelion (21–31 March 2022) with the Parker Solar Probe motion during Encounter 11 (20 February to 2 March, 2022). During these 11 days, Solar Orbiter covered 86° in Carrington longitude and about 4.5 R⊙ in radial distance. During a similar 11-day period around its own perihelion, Parker Solar Probe spanned 146° in Carrington longitude and more than 40 R⊙ in radial distance.
A running-difference method can still, even if it is effective, introduce artificial features in an image, and more sophisticated methods of F-corona removal can reveal some unique substructure with more physical accuracy. The application of methods like this to SoloHI data is in progress.
2. Methods
Observations from LASCO and SECCHI have been extensively used in the coronal and heliospheric research communities to study the evolution of CMEs. To demonstrate the additional details visible in SoloHI images, it is useful to compare observations of CMEs from these instruments at common times and regions in space. To make these comparisons, we took images from SoloHI, STEREO-Ahead/COR2, STEREO-Ahead/HI1, and, for one event, from LASCO/C3.
We processed the data from all the instruments with the same running-ratio technique. The resulting images reveal transient features in a manner that is directly related to the cadence at which the images were taken. When running techniques are used, some features appear broader or narrower at slower or faster cadences. Slowly moving features can be difficult to see when the gap between images is too short and remains in a similar place within a detector. If the gap between images is too large, there may be too much motion to allow an individual motion to be clearly seen. The cadence should always be carefully considered when any running-difference technique is used, and changing the gap between images can allow different features to become more or less visible (Hess & Colaninno 2017). Around perihelion, SoloHI has a cadence of 12 min on the inner two tiles, and 24 min on the outer tiles. COR2 has a typical cadence of 15–30 min, the cadence of HI1 is 40 min, and that of C3 is 12 min (see Table 1).
To compare the observations STEREO and LASCO at 1 au to the SoloHI observations near perihelion at ∼0.3 au, we must first convert images from the angular distance to heights to determine the overlapping regions. The conversion between the image coordinates and physical coordinates in each image was made using the helioprojective Cartesian (HPC) coordinate system (Thompson 2006) for each instrument. This conversion is based on the specific location of the observer when an image is taken and the pointing of the individual frame of the detector. This pointing information is determined from the star field calibration (see Hess et al. 2021 for details on how this was performed for WISPR) and is provided in the header for each image file from every instrument. We converted the angular HPC system into radial heights measured in R⊙ based on the angular size of the Sun for each observer, as determined by the plate scale of the instrument. All the required values are in the instrument headers and can also be obtained using the SunSpice package within the SolarSoft library (SSW; Freeland & Handy 1998). Other routines based on the World Coordinate System (WCS; Thompson 2010), also part of SSW, were used to perform the actual conversion calculations.
To obtain the common FoV, we projected each image onto grids of overlapping commonly observed heights. When comparing SECCHI and SoloHI, this region is roughly 6–50 R⊙ in the radial direction and −22 to 22 R⊙ around the ecliptic. This corresponds to roughly the entire SoloHI FoV near perihelion, and it includes the outer portion of the COR2 FoV and roughly half the HI1 FoV in SECCHI.
When C3 was included in the comparison, we further restricted the outer limit of radial coverage to 30 R⊙ and cropped the other direction to ±12 R⊙ of the solar equatorial plane to keep the region square. This comparison included most of the C3 radial FoV off one limb of the Sun, while restricting the SoloHI FoV to just the inner tiles and the HI1 FoV to about a quarter of the full detector.
When comparing white-light images of the corona and the heliosphere, the potential impact of the Thomson-scattering efficiency must be considered, especially when the observations are taken from varied heliocentric distances. It is important to keep in mind that the intensity in each pixel is proportional to the line integral of the volumetric electron density along the viewer line of sight (Billings 1966). This allows the white-light CME measurements to be used to estimate parameters such as density, shock-compression ratio (Bemporad et al. 2014), and mass (Bein et al. 2013). These are all things we plan to do with SoloHI data, although more work on photometric calibration is needed to ensure that the derived densities are reliable.
The term ‘plane of the sky’ is traditionally used to refer to the surface of the maximum Thomson-scattering efficiency, which lies at the tangent of the line of sight to the radial from Sun center. This surface is approximately a plane at small elongations, but it becomes a sphere following the location of the maximum Thomson-scattering efficiency, named the Thomson sphere by Vourlidas & Howard (2006).
Because of the viewing geometry and scattering efficiencies, it is not trivial to convert the elongation of a feature (which is the observational unit of measurement) into projected heliocentric distance, and a variety of methods have been developed for both 1 au observations (Vourlidas & Howard 2006; Rollett et al. 2012; Möstl et al. 2014) and more recently for the shorter, varying heights of PSP (Nindos et al. 2021; Liewer et al. 2022). A common approach of converting elongation, ϵ, into projected distance, d, is d = Rsin(ϵ). Because this approximation, known traditionally as point-P, mimics a great circle running through the observer and the Sun, it also represents the location of a feature on the Thomson surface.
At large elongations, this simple conversion into distance introduces errors as the CME moves toward or away from the observer and as the curvature of the Thomson sphere becomes more pronounced. Without knowing the location of the observed feature along the line of sight or the total width of the CME, this error cannot be quantitatively calculated without making significant assumptions. Lugaz et al. (2009) found that beyond the SECCHI/HI-1 FoV, these errors will balloon significantly, but within it they demonstrate an agreement within 10% of other methods that consider CME geometry and location. Therefore, we consider 10% a reasonable estimate of the uncertainty in the reported heights and measurements in this work, while we acknowledge that the many assumptions used throughout could lead to larger errors. A more quantitatively rigorous study of the measured parameters for these events requires a careful 3D reconstruction of the events.
To further analyze the kinematics of CMEs, as well as different visible features within it, we began by creating a map of the elongation versus time (J-map; Sheeley et al. 1999). These maps were generated at a given position angle relative to solar north by stacking strips from each image at that angle from a series of consecutive image frames. Features propagating out from the Sun appear as linear or curved bright streaks going out in elongation with time. Although the angular FoV is constant, the range of distances imaged projected on the Thomson sphere depends on the location of the observer. Therefore, to compare the maps from observers located at different radial distances, we must use the method detailed above to convert the angular elongations into radial heights.
3. Events
As Solar Orbiter began its first science RSW on 2 March, 2022, the spacecraft was close to the Sun-Earth line, meaning that SoloHI was observing off the east limb of the Sun relative to the Earth and the spacecraft. By the time of perihelion on 26 March 2022, the spacecraft was approaching the west limb of the Sun as seen from Earth. This configuration allowed SoloHI to observe Earth-directed structures from the side in the period immediately after perihelion, and it was a favorable common viewing geometry with STEREO-A. For the events studied, the spacecraft configuration for the three observing points is shown in Fig. 2. Over the span of events in this study, Solar Orbiter was consistently near 0.32 au, so that the SoloHI angular FoV corresponded to roughly 6 − 50 R⊙, although these values increase slightly as the spacecraft recedes further from perihelion. In the 6-day span highlighted in Fig. 2, the spacecraft moves a total of ∼50° in Carrington longitude. This motion of less than 9° per day is low enough that we are confident that the spacecraft motion did not introduce significant observational artifacts during the passage of these events.
 |
Fig. 2. Location of Solar Orbiter in HEE coordinates at the onset of the various events alongside the approximate SoloHI FoV at each time. For each event, the spacecraft is consistently near 0.32 au, meaning that the SoloHI FoV is roughly 6 − 50 R⊙, as shown with the dashed lines coming from the spacecraft. The arrows indicate the longitude of the active region at the time of the associated flare, also shown in Table 2. These do not necessarily coincide with the direction of propagation of the CME. The dashed circles represent intervals of 0.25 au from the Sun. The solid black ellipse is the orbit of Solar Orbiter. The Earth and STEREO-A are also shown for reference. The position of the Earth can be taken for that of LASCO. The solid circles representing the various objects are not to scale. |
During this period, a number of active regions were also visible on the Earth-facing solar disk. An example HMI magnetogram (Scherrer et al. 2012) is shown in Fig. 3 from 28 March 2022, where the active regions are labeled with NOAA designations. Of these numerous regions, AR12975 was particularly volatile during this period in terms of flare activity. Between 28 March and 4 April, when the AR retreated behind the limb as viewed from Earth, more than 50 recorded GOES flares were associated with this region. The active region produced many large flares, including ten M-class and one X-class flare. The CMEs studied here were associated with the X1.3 flare on 30 March, as well as with M-class flares on 28 March and 2 April. The locations of relevant spacecraft during these flares, as well as the longitude of the active region at the time of the flare, are shown in Fig. 2. The longitude of the flare site gives a reasonable idea of the direction of propagation of the CME, without considering the possibility of a deflection in the low corona (Kay & Opher 2015). The timing, intensity, and location of each flare associated with a CME is listed in Table 2. The longitudes given in Table 2 are in Stonyhurst longitude.
 |
Fig. 3. SDO/HMI magnetogram from 28 March 2022 20:03:29 UT. The active regions are labeled with NOAA designations. The grid lines represent 15° in Stonyhurst longitude and latitude. |
Flare information.
As the paper focuses on the SoloHI observations and comparisons with observations at the same heights from other instruments with overlapping FoVs, we did not include remote-sensing observations from other Solar Orbiter instruments. EUI captured the source region of these events and may be a useful reference for studying the initiation of these CMEs. Due to spacecraft off-pointing, there are no Metis observations for the events beginning on 30 March or 2 April. The available Metis data for the events on 28 March are limited by the narrow FoV of the coronagraph at perihelion, reducing the number of available observations of the same features tracked by SoloHI. It is possible to discern some features associated with these events, largely those trailing the leading edge.
3.1. 28-29 March 2022 CMEs
AR12975 was near disk center with respect to the Earth at 10:58 UT when it generated an M4 flare accompanied by a CME. Solar Orbiter was in near-quadrature with Earth (Fig. 2) and 112° from STEREO-A. Approximately 10.5 h later, an M1.1 flare and second CME originated from the same source region.
Based on the location of the source region, these two CMEs were predominantly directed toward Earth. In the LASCO coronagraphs, a full halo can be seen, which is typically associated with a CME-driven shock (Kwon et al. 2015). Both CMEs seem to propagate northwest of disk center. These observations indicate that the CME propagated slightly west of Earth, between Solar Orbiter and STEREO-A.
A series of SoloHI and SECCHI snapshots of these events in the overlapping FoVs are presented in Fig. 4. LASCO data are not included because the significantly different viewing geometry does not lend itself to comparisons of the observed structures. SoloHI and SECCHI viewed similar regions of space from nearly diametrically opposite locations. To facilitate comparison, the SoloHI data were flipped with the Sun on the left from the nominal view as seen in Fig. 1.
 |
Fig. 4. Roughly cotemporal images of the 28 March CME from SoloHI and the SECCHI instrument suite. To highlight the common FoV, images from all SoloHI tiles and COR2 and HI1 are projected onto identical grids, covering 6–50 R⊙ in the radial direction and −22 to 22 R⊙ in the y-direction. The SoloHI images are flipped from their standard viewing direction to facilitate comparison. All images from every instrument are processed with a running ratio byte-scaled to a range of 0.98–1.02. The times given in the SoloHI frames correspond to the time of the tile 1 image, and the other tiles are the closest frame to that tile 1 image. Similarly, SECCHI times are based on COR2 timing, and the closest HI1 frame was selected. Late in the day, the second CME becomes visible at the inner part of the FoV. Movies of the projected fields of view used to generate these panels are provided online for both SECCHI and SoloHI, covering the entire period of 28 March to April 2. |
Both CMEs are clearly visible in SECCHI observations as a limb event from the west of the Sun from the point of view of STEREO-A. There is no evidence of CME-CME interaction in the coronagraph FoV because the two events are separated by enough time for the first CME to be well beyond the outer limit of the COR2 FoV before the second erupts. The fronts of both CMEs can be tracked separately through the SECCHI/HI1 FoV. SoloHI has a similar view of the CME as SECCHI, but from the opposite side.
In the first two columns of Fig. 4, only the first CME is visible. However, two distinct bright fronts, both associated with the first CME, are clearly visible in SoloHI, and are more dimly visible in HI1, starting at 15:56 UT and persisting to 22:44 UT in SoloHI. The nature of these two fronts is difficult to interpret, as the outermost feature, a ‘narrow’ pointed front near the center of the SoloHI FoV, seems to propagate somewhat independently of the more ‘typical’ CME shape behind it. Both of these fronts are highlighted in Fig. 4.
In the last column of Fig. 4, the front of the second CME has entered the FoVs of both COR2 and SoloHI. The second CME has a typical broad and rounded front with multiple loop-like structures within the interior of the CME. Unfortunately, SoloHI did not take images between 28 March 23:32 UT and 29 March 03:12 UT because spacecraft momentum maintenance affected the pointing.
When SoloHI observations resumed at 03:34 UT on 29 March, both CMEs were still visible for SoloHI and HI1, as shown in Fig. 5. Figure 5 shows the additional observing power of SoloHI particularly well. The fronts in the HI1 images clearly correspond to those seen in SoloHI, but the structure in SoloHI is clearly sharper and shows more detail thanks to the closer viewing distance and significantly shorter exposure times of the SoloHI images (Table 1).
 |
Fig. 5. Roughly cotemporal images of the 28 and 29 March CMEs from SoloHI and the SECCHI instrument suite. To highlight the common FoV, images from all SoloHI tiles and COR2 and HI1 are projected onto identical grids, covering 6–50 R⊙ in the radial direction and −22 to 22 R⊙ in the y-direction. The SoloHI images are flipped from their standard viewing direction to facilitate comparison. Features of note are highlighted in the earliest frame in both instruments to facilitate tracking these features in the frames. All images from every instrument were processed with a running ratio byte-scaled to a range of 0.98–1.02. The times given in the SoloHI frames correspond to the time of the tile 1 image, and the other tiles are the closest frame to that tile 1 image. Similarly, SECCHI times are based on COR2 timing, and the closest HI1 frame was selected. Movies of the projected fields of view used to generate these panels are provided online for both SECCHI and SoloHI and cover the entire period of 28 March to 2 April. |
With the missing observations between 28 March and 29 March, the two CMEs become increasingly difficult to distinguish as the second CME catches up with the first CME. The small elliptical structure behind the fronts can be tracked until it exits the FoV. It is unclear whether this feature belongs to the second CME or if it is related to a similar feature in the COR2 images of the first CME. The shape of the structure, its coherent evolution, and its placement in the center of the CME indicate that this is likely some sort of cavity, possibly related to a flux rope in the low corona. This feature is highlighted in Fig. 5, as are the four distinct fronts that are visible in both SoloHI and SECCHI. They are in much sharper focus in SoloHI.
It should also be noted that in some SoloHI mosaics, slight discontinuities can appear across the tile boundaries, as can be seen at the tip of the narrow front between tiles 1 and 2 in the top left panel of Fig. 4. This is likely a combination of the slight difference in timing between the individual tiles, and it may also be a function of a slight vignetting at the tile borders. To assess the bulk position of the CME, these discrepancies are minor. Because of the timing differences, the individual tile files will provide more accurate position information than using the combined mosaic images.
The J-map for this event is shown in Fig. 6. The position angle, 86°, was chosen as the approximate central position of the CME and runs through tiles 2 and 3. The unfortunate timing of the data gaps is immediately apparent in Fig. 6. The gaps occur during the time of possible interaction between the fronts. A number of features are visible after the second data gap, showing a complex CME with many distinct fronts, as noted in Fig. 5.
 |
Fig. 6. SoloHI height vs. time map for 28 and 29 March. The map is generated by taking a strip of images at a given position angle, in this case, 86° from solar north, and stacking each time step together. The extended horizontal black line is the boundary between detectors. The y-axis is the radial distance in R⊙. The features highlighted in Fig. 4 are also noted here, but without differentiating the multiple fronts seen later in the period. The data gaps caused by the instrument shutting off during a spacecraft maneuver are also highlighted. |
The sharper features that are visible after the second data gap in Fig. 6 are due to an increase in the cadence after the Solar Orbiter pointing stabilized on 29 March. To help fill in the gaps in the SoloHI data, a SECCHI J-map is shown in Fig. 7. The first bright track corresponding to the first CME corresponds to the first CME in SoloHI. The second front visible between the gaps in Fig. 6 is more clearly seen as a full, slower secondary feature that becomes increasingly separated from the leading edge before it is hit by the second CME from behind in Fig. 7. Based on the timing, this would appear to be the distinction between the pointed extended front and the more typical CME front behind it, which we discussed in conjunction with Fig. 4.
 |
Fig. 7. SECCHI height vs. time map for 28 and 29 March. The map is generated by taking a strip of images at a given position angle, in this case, 274° from solar north, and stacking each time step together. The position angle differs from the SoloHI position angle in Fig. 6 because the observers on the different spacecraft observe from opposite directions. The y-axis is the radial distance in R⊙. |
Figures 6 and 7 both show a number of trailing features after the entanglement of the two CMEs. Individual tracks are more clearly defined in the SoloHI data. These fine structures match the comparison we presented between the full-frame images from each observer after the interaction of the two CMEs visible in Fig. 5.
Speed can be derived from Fig. 6 as the slope of the observed features. The features seen after the arrival of the second CME are much steeper, indicating a faster speed than for the original event. While the SoloHI data gaps make measuring difficult, the increased continuity of SECCHI allows the determination of speeds based on the slopes of the linear features.
Because the spatial and temporal information that can be taken from these maps is limited by the nature of their constructions, the speeds are approximate and highly sensitive to the exact points used for the calculation. The first front visible in Fig. 7 has a speed of ∼615 km s−1. The second slower front still associated with the first CME has a speed of ∼350 km s−1. The speed of the second CME is ∼800 km s−1. When the second CME overtakes the first in the SECCHI FoV, there appears to be a sudden upward shift in the trailing track associated with the first eruption. Whether this is a real sudden acceleration or merely the preexisting front being obscured by the second cannot be distinguished in these data.
3.2. 30 March 2022 CME
By late on 30 March, AR12975 had rotated about 30° from the central meridian, while Solar Orbiter was now about 10° behind the western solar limb of the Sun relative to the Earth. AR12579 launched an X1.4 flare on 30 March beginning at 17:21 UT and peaking 16 min later with an accompanying CME.
As shown in Fig. 8, this CME was observed in SECCHI and appeared to propagate along the equatorial plane, off the western limb, consistent with the location of the source AR. LASCO observations again reveal a faint halo, which, combined with the location of the event from the other observers, indicates that this CME is also largely Earth directed and possibly driving a shock.
 |
Fig. 8. Roughly cotemporal images of the 30 March CME from SoloHI and the SECCHI instrument suite. To highlight the common FoV, images from all SoloHI tiles and COR2 and HI1 are projected onto identical grids, covering 6–50 R⊙ in the radial direction and −22 to 22 R⊙ in the y-direction. The SoloHI images are flipped from their standard viewing direction to facilitate comparison. Features of note are highlighted in the earliest frame in which they are all visible in both instruments to facilitate tracking these features in the frames. All images from every instrument were processed with a running ratio byte-scaled to a range of 0.98–1.02. The times given in the SoloHI frames correspond to the time of the tile 1 image, and the other tiles are the closest frame to that tile 1 image. Similarly, SECCHI times are based on COR2 timing, and the closest HI1 frame was selected. Movies of the projected FoVs used to generate these panels are provided online for both SECCHI and SoloHI covering the entire period of 28 March to 2 April. |
The SoloHI observations of this event are also displayed in Fig. 8. Once again, comparable features can be seen in both instruments, but they are much sharper in SoloHI. The CME first appears to be surrounded by a faint sheath and a wave front propagating along the streamers north and south of the CME, indicating a wave, possibly a shock, caused by the expanding CME. The wave front and CME leading edge are easier to distinguish in the SoloHI images compared to HI1. In the SoloHI data, the complex loop-like interior structures are visible, similar to the prior CMEs. In both the SECCHI and SoloHI observations, a small cavity is observed at the center of the event. This cavity is more pronounced in SoloHI, allowing it to be tracked at greater heights.
In the 30 March 2022 CME, the southern part of the CME leading edge is faster then the rest of the ejecta. Moreover, the front of the CME appears to slow down and flatten during the propagation within the SoloHI FoV in relation to the other CME substructures. This evolution is better appreciated in the online movie. There are signs of streamer deflections on either flank, so it is possible that the CME front propagated along the pre-eruption streamer stalk and was deformed by the interaction with the dense plasma at that location. Front distortions are seen rather frequently in coronagraph images (i.e., dimpled fronts Vourlidas et al. 2017).
The J-map for this event is shown in Fig. 9. There is yet another data gap during this event for a spacecraft momentum maneuver between 31 March 00:00 UT and 04:00 UT. Two bright features are visible. The first bright streak is the CME leading edge. The second bright streak corresponds to the trailing edge of the potential cavity. The SECCHI J-map (Fig. 10) shows the leading edge and the cavity feature, but it is less pronounced than in Fig. 9. The curvature of the tracks in each J-map indicate deceleration beyond ∼20 R⊙.
 |
Fig. 9. SoloHI height vs. time map for 30 and 31 March. The map is generated by taking a strip of images at a given position angle, in this case, 86° from solar north, and stacking each time step together. The extended horizontal black line is the boundary between detectors. The y-axis is the radial distance in R⊙. The features highlighted in Fig. 8 are also noted here, as are various pointing changes caused by the spacecraft. Notably, the location of the tracks seem unaffected by these changes. |
The leading-edge track measured from the SoloHI map in Fig. 9 indicates a speed of ∼575 km s−1, while the trailing feature has a a speed of roughly 350 km s−1. In Fig. 10, the leading SECCHI edge shows a more pronounced deceleration because it covers a larger portion of the heliosphere. The initial speed over a region similar to the SoloHI FoV is ∼750 km s−1, with a final speed closer to 600 km s−1. The trailing feature, which appears to be mostly linear, has a speed of approximately 450 km s−1.
 |
Fig. 10. SECCHI height vs. time map for 30 and 31 March. The map is generated by taking a strip of images at a given position angle, in this case, 274° from solar north, and stacking each time step together. The position angle differs from the SoloHI position angle in Fig. 9 because the observers on the different spacecraft observe from opposite directions. The y-axis is the radial distance in R⊙. |
It is possible that the speeds are faster in SECCHI compared to SoloHI because of projection effects caused by the different angles between the observed structures and the different observers. A feature propagating toward the observer will traverse the field of view more quickly, which means that if the front of this event were propagating more toward STEREO-A, the estimated speed would be slightly higher in SECCHI observations than in SoloHI.
3.3. 2 April 2022 CME
The final CME seen by SoloHI was related to an 2 April 2022 M3.9 flare from AR12975 that peaked at 13:55 UT. At this time, the AR was barely visible from Earth, and Solar Orbiter was about 20° behind the limb. Because of the source location, the CME was clearly observed in SECCHI (Fig. 11). Despite the northern location of the source region, the CME appears to be propagating slightly southward. Another cavity also appears briefly in COR2, with a possible corresponding feature in SoloHI. Based on the location of the source region and the LASCO observations Fig. 12, it seems likely that the CME was propagating on the limb relative to the Earth, which would mean that it was directed more toward Solar Orbiter.
 |
Fig. 11. Roughly cotemporal images of the 2 April CME from SoloHI and the SECCHI instrument suite. To highlight the common FoV, images from all SoloHI tiles and COR2 and HI1 are projected onto identical grids, covering 6–50 R⊙ in the radial direction and −22 to 22 R⊙ in the y-direction. The SoloHI images are flipped from their standard viewing direction to facilitate comparison. Features of note are highlighted in the earliest frame in both instruments to facilitate tracking these features in the frames. All images from every instrument were processed with a running ratio byte-scaled to a range of 0.98–1.02. The times given in the SoloHI frames correspond to the time of the tile 1 image, and the other tiles are the closest frame to that tile 1 image. Similarly, SECCHI times are based on COR2 timing, and the closest HI1 frame was selected. Movies of the projected FoVs used to generate these panels are provided online for both SECCHI and SoloHI covering the entire period of 28 March to 2 April. |
This CME appears to be much faster than the others in the study because the leading edge enters and exits the FoV of COR2 in less than 90 min, while the others all remain in the FoV for at least one additional hour. At common heights, the SECCHI observations display similar general features to those of SoloHI, but the SECCHI images are more strongly blurred than for the previous events because the CME moves more between frames. This also causes additional difficulty in combining the COR2 and HI1 observations because it is the fastest CME in our sample. Slight timing differences between the two instruments are therefore more pronounced. This speed also introduces possible discrepancies between the SoloHI tiles. However, these artifacts are much less pronounced because the exposure times and cadence (Table 1) are much shorter in SoloHI than in HI1.
The improvement offered by SoloHI becomes more apparent when we restrict the height even further and include the LASCO data (Fig. 12). This comparison is possible now that the active region is closer to the limb and the CME does not propagate toward the Earth. LASCO/C3 has a significantly lower throughput than SoloHI. This means that CMEs in C3 fade quickly as they reach the outer FoV, as Fig. 12 demonstrates.
 |
Fig. 12. Roughly cotemporal images of the 2 April CME from SoloHI and the SECCHI instrument suite, as well as LASCO. To highlight the common FoV, images from all SoloHI tiles, COR2/HI1 and C3, are projected onto identical grids, covering 6–30 R⊙ in the radial direction and −12 to 12 R⊙ in the y-direction. The SoloHI images are flipped from their standard viewing direction to facilitate comparison. All images from every instrument are processed with a running ratio byte-scaled to a range of 0.98–1.02. The times given in the SoloHI frames correspond to the time of the tile 1 image, and the other tiles are the closest frame to that tile 1 image. Similarly, SECCHI times are based on COR2 timing, and the closest HI1 frame was selected. Movies of the projected FoVs used to generate these panels are provided online for C3, SECCHI and SoloHI covering the entire period of 28 March to 2 April. |
As the spacecraft maintained stable pointing during these observations and avoided any disruptive maneuvers, the J-map for the 2 April 2022 event does not contain any noticeable artifacts (Fig. 13). As this is the only CME in the set that appears to propagate south of the equatorial plane, the position angle we selected for this event was 94°, running through tiles 1 and 4.
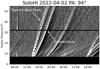 |
Fig. 13. SoloHI elongation vs. time map for 2 and 3 April. The map is generated by taking a strip of images at a given position angle, in this case, 94° from solar north, and stacking each time step together. The y-axis is the radial distance in R⊙. The features highlighted in Fig. 11 are also noted here. |
The leading track seems to bifurcate with increasing distance, possibly indicating the decoupling of the wave front from the driver CME. Both of these fronts are visible in the SoloHI frames in Figs. 11 and 12, but with a very short standoff distance between the ejecta visible edge of the sheath because the CME is so fast. The noticeable trailing feature behind the leading edge is probably related to the possible cavity.
The speed estimate of the leading edge in Fig. 13 is 1450 km s−1. The trailing feature behind it is just slightly slower, 1250 km s−1, with an upward curve that would typically be indicative of acceleration of the feature through the FoV. As always in J-maps, it is necessary to acknowledge that apparent acceleration could just be a projection effect if the feature is propagating towards the observer and the assumption of a Thomson sphere is invalid. Analysis of the SoloHI images indicates that this feature is likely the front edge of another circular cavity at the center of the CME. A third feature, a few hours later and apparently a distinct front related to the eruption, but occurring well after the flare, shows an even more apparent acceleration and has a speed of approximately 850 km s−1
The profiles in the SECCHI map (Fig. 14) are more indicative of typical fast CME kinematics. The same three fronts are visible, but the leading front is initially steep before it shows signs of deceleration. The trailing related fronts are less steep and more linear. The initial speed of the leading edge from the SECCHI J-map is ∼1300 km s−1. The speeds of the two following fronts are approximately 850 km s−1 and 550 km s−1, respectively.
 |
Fig. 14. SECCHI height vs. time map for 2 and 3 April. The map is generated by taking a strip of images at a given position angle, in this case, 266° from solar north, and stacking each time step together. The position angle differs from the SoloHI position angle in Fig. 13 because the observers on the different spacecraft observe from opposite directions. The y-axis is the radial distance in R⊙. |
The reason for the discrepancies in speed and kinematics is most likely the aforementioned projection effects. A CME that initially propagates at more than 1000 km s−1 near the Sun is generally expected to decelerate in the outer corona, except under extreme conditions. The steeper J-map profiles in SoloHI indicate that the event (or the part seen by SoloHI, at least) is moving towards the Solar Orbiter spacecraft. Based on the location of the source region relative to STEREO-A, shown in Fig. 2, the event likely propagates close to the SECCHI-assumed sky plane, hence the kinematics derived from SECCHI should be representative of the actual propagation.
Most curious for the 2 April and 30 March events is the apparent similarity in their morphologies as shown in Figs. 8 and 11. The variation between the kinematics derived from the J-maps indicates that these CMEs propagate significantly closer to one observer than the other. While this difference would likely cause different regions of the CME to interact with the relative Thomson spheres of the observers, the visual characteristics of the apparent structure appear to be remarkably similar. The most obvious interpretation is that the CMEs are sufficiently wide for projection effects to be minimized between the two viewpoints. The similarly distorted fronts and lateral compression for both events would indicate that there are many common characteristics in both events. This similarity should be expected because the events originate from the same region and propagate along a similar corona (along the ecliptic, in this case). Therefore, they disrupt the corona in similar ways.
4. Conclusions
The SoloHI instrument provides observations with higher temporal and spatial resolution of a key region in space where the solar atmosphere begins to transition from a Sun-dominated corona into the heliospheric region of the supersonic solar wind. For CMEs, this region has an increased physical complexity because the CME evolves from a relatively compact, idealized structure and begins to interact with the solar wind in complicated and still poorly understood ways.
An advantage of observing from the Solar Orbiter spacecraft is that it results in a quasi-stationary viewpoint from ∼0.3 au during the time (approximately one day) that a CME takes to traverse the SoloHI FoV. This allows us to track the CME and its substructures in a manner similar to the more familiar 1 au observations and without the ambiguities introduced in the WISPR observations by the rapid motion of the PSP spacecraft (see Patel et al. 2023 for a demonstration of these ambiguities in WISPR). In addition, SoloHI covers heights that are traditionally observed by the 1 au coronagraphs and heliospheric imagers, thus enabling straightforward comparisons. The events presented in this paper demonstrate the significant improvement in image quality and scientific content of the SoloHI observations when compared to cotemporal SECCHI and LASCO observations at similar viewing angles and heliocentric distances. Here, we have demonstrated the following three areas of improvement:
-
SoloHI has a higher sensitivity than STEREO/HI and reveals faint structures, such as leading wave fronts and sheath regions, with much better clarity, as we showed in Fig. 4 and particularly in Fig. 11.
-
The higher sensitivity and cadence of SoloHI reveal fine-scale structure in the CME interior than cannot be detected in STEREO/HI due to motion blur (Fig. 5).
-
The improved sensitivity and cadence allow a more accurate tracking of CME structures and will improve the kinematic analysis of CMEs in the inner heliosphere. A comparison between the J-maps from SoloHI and SECCHI (Fig. 6) is very encouraging, despite the gaps imposed by spacecraft motions.
In short, these early observations and cross-instrument comparisons give us confidence that SoloHI contributes significantly to the Solar Orbiter key science questions and helps answer persistent questions opened by the trailblazing heliospheric imagers on STEREO, on the inner heliospheric propagation of CMEs, and, by extension, helps improve space-weather forecasting methods.
This group of three events presents a particularly interesting data set. The three CMEs all originate from the same active region. The asymmetric leading edge with a narrow southern front that is to various degrees seen in all the events indicates a common evolution in the heliosphere. Additionally, the SoloHI data show a complex loop-like interior structure of the CMEs that includes a central cavity that may be evidence of an internal flux rope. SoloHI observations of the events presented here provide many interesting opportunities for analyzing CME propagation and interaction with the solar wind in future studies.
The new data sets provided by SoloHI and other next-generation instruments call for new, more sophisticated analysis techniques. If we attempt to merely add the new data sets and repeat work similar to what has been done based on 1 au observations, progress in understanding CME progress will be limited. By leveraging the inherent resolution available when we image much closer to these structures, we can begin to address key remaining questions of the propagation and evolution of CMEs.
However, given the encounter-based concept of operations for the Solar Orbiter (and PSP) missions, their observations benefit greatly by the more synoptic imaging available from 1 au. For example, comparisons between the SECCHI and SoloHI J-maps show that for many events, the SECCHI maps are cleaner and have fewer issues than those from SoloHI because of the stability of the STEREO observing platform. For simple tracking and propagation studies, the 1 au observations may be more appropriate data than SoloHI (or WISPR) J-maps. For detailed studies of fine-scale structures in the inner heliosphere, however, the high contrast and short exposures of SoloHI offer images with the best quality ever taken in this observational regime.
We close with a parting thought on the value of systems science. While the observational advantages of SoloHI relative to previous 1 au imagers is obvious from the images, the context provided via these synoptic stable viewpoints is vital for understanding Solar Orbiter and PSP data by placing them in the global perspective of the Sun-Earth system. Instead of rendering the previous generations of the Heliospheric Systems Observatory obsolete, the closer observational viewpoints only reinforce the importance of these overlapping data sets to maximize the returns of our newest missions. Forthcoming papers from the SoloHI team, using both these events and others from more recent orbits, will highlight the detailed studies that are now possible with these data.
Movies
Movie 1 associated with Figs. 4, 5, 8, and 11 (SOLOHI_50RS) Access Supplementary Material
Movie 2 associated with Figs. 4, 5, 8, and 11 (SECCHI_50RS) Access Supplementary Material
Movie 3 associated with Fig. 12 (SOLOHI_30RS) Access Supplementary Material
Movie 4 associated with Fig. 12 (SECCHI_30RS) Access Supplementary Material
Movie 5 associated with Fig. 12 (LASCO_30RS) Access Supplementary Material
Acknowledgments
We would like to thank the referee for improving the quality of this paper. Solar Orbiter is a space mission of international collaboration between ESA and NASA, operated by ESA. The Solar Orbiter Heliospheric Imager (SoloHI) instrument was designed, built, and is now operated by the US Naval Research Laboratory with the support of the NASA Heliophysics Division, Solar Orbiter Collaboration Office under DPR NNG09EK11I. The SECCHI data are produced by an international consortium of the NRL, LMSAL, and NASA GSFC (USA), RAL and U. Bham (UK), MPS (Germany), CSL (Belgium), IOTA, and IAS (France). The SOHO/LASCO data used here are produced by a consortium of the Naval Research Laboratory (USA), Max-Planck-Institut fuer Aeronomie (Germany), Laboratoire d’Astronomie (France), and the University of Birmingham (UK). SOHO is a project of international cooperation between ESA and NASA. PH and RCC are supported by the Office of Naval Research. RAH, GS and AV are supported by NASA grant 80NSSC22K1028.
References
- Andretta, V., Bemporad, A., De Leo, Y., et al. 2021, A&A, 656, L14 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Antonucci, E., Romoli, M., Andretta, V., et al. 2020, A&A, 642, A10 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Bein, B. M., Temmer, M., Vourlidas, A., Veronig, A. M., & Utz, D. 2013, ApJ, 768, 31 [Google Scholar]
- Bemporad, A., Susino, R., & Lapenta, G. 2014, ApJ, 784, 102 [NASA ADS] [CrossRef] [Google Scholar]
- Bemporad, A., Andretta, V., Susino, R., et al. 2022, A&A, 665, A7 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Billings, D. E. 1966, A Guide to the Solar Corona (Academic Press) [Google Scholar]
- Brueckner, G. E., Howard, R. A., Koomen, M. J., et al. 1995, Sol. Phys., 162, 357 [NASA ADS] [CrossRef] [Google Scholar]
- Eyles, C. J., Harrison, R. A., Davis, C. J., et al. 2009, Sol. Phys., 254, 387 [Google Scholar]
- Fox, N. J., Velli, M. C., Bale, S. D., et al. 2016, Space Sci. Rev., 204, 7 [Google Scholar]
- Freeland, S. L., & Handy, B. N. 1998, Sol. Phys., 182, 497 [Google Scholar]
- García Marirrodriga, C., Pacros, A., Strandmoe, S., et al. 2021, A&A, 646, A121 [CrossRef] [EDP Sciences] [Google Scholar]
- Hess, P., & Colaninno, R. C. 2017, ApJ, 836, 134 [NASA ADS] [CrossRef] [Google Scholar]
- Hess, P., Howard, R. A., Stenborg, G., et al. 2021, Sol. Phys., 296, 94 [NASA ADS] [CrossRef] [Google Scholar]
- Howard, R. A., Moses, J. D., Vourlidas, A., et al. 2008, Space. Sci. Rev., 136, 67 [CrossRef] [Google Scholar]
- Howard, R. A., Vourlidas, A., Colaninno, R. C., et al. 2020, A&A, 642, A13 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Howard, R. A., Stenborg, G., Vourlidas, A., et al. 2022, ApJ, 936, 43 [NASA ADS] [CrossRef] [Google Scholar]
- Kaiser, M. L., Kucera, T. A., Davila, J. M., et al. 2008, Space. Sci. Rev., 136, 5 [Google Scholar]
- Kay, C., & Opher, M. 2015, ApJ, 811, L36 [NASA ADS] [CrossRef] [Google Scholar]
- Kwon, R.-Y., Zhang, J., & Vourlidas, A. 2015, ApJ, 799, L29 [NASA ADS] [CrossRef] [Google Scholar]
- Lamy, P., Gilardy, H., Llebaria, A., Quémerais, E., & Ernandez, F. 2021, Sol. Phys., 296, 76 [NASA ADS] [CrossRef] [Google Scholar]
- Lamy, P. L., Gilardy, H., & Llebaria, A. 2022, Space. Sci. Rev., 218, 53 [NASA ADS] [CrossRef] [Google Scholar]
- Liewer, P. C., Qiu, J., Ark, F., et al. 2022, Sol. Phys., 297, 128 [NASA ADS] [CrossRef] [Google Scholar]
- Liewer, P. C., Vourlidas, A., Stenborg, G., et al. 2023, ApJ, 948, 24 [NASA ADS] [CrossRef] [Google Scholar]
- Lugaz, N., Vourlidas, A., & Roussev, I. I. 2009, Ann. Geophys., 27, 3479 [Google Scholar]
- Möstl, C., Amla, K., Hall, J. R., et al. 2014, ApJ, 787, 119 [Google Scholar]
- Müller, D., St. Cyr, O. C., Zouganelis, I., et al. 2020, A&A, 642, A1 [Google Scholar]
- Nindos, A., Patsourakos, S., Vourlidas, A., et al. 2021, A&A, 650, A30 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Patel, R., West, M. J., Seaton, D. B., et al. 2023, ApJ, 955, L1 [NASA ADS] [CrossRef] [Google Scholar]
- Rochus, P., Auchère, F., Berghmans, D., et al. 2020, A&A, 642, A8 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Rollett, T., Möstl, C., Temmer, M., et al. 2012, Sol. Phys., 276, 293 [Google Scholar]
- Scherrer, P. H., Schou, J., Bush, R. I., et al. 2012, Sol. Phys., 275, 207 [Google Scholar]
- Sheeley, N. R., Walters, J. H., Wang, Y. M., & Howard, R. A. 1999, J. Geophys. Res., 104, 24739 [Google Scholar]
- Thompson, W. T. 2006, A&A, 449, 791 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Thompson, W. T. 2010, A&A, 515, A59 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Vourlidas, A., & Howard, R. A. 2006, ApJ, 642, 1216 [Google Scholar]
- Vourlidas, A., Howard, R. A., Plunkett, S. P., et al. 2016, Space. Sci. Rev., 204, 83 [NASA ADS] [CrossRef] [Google Scholar]
- Vourlidas, A., Balmaceda, L. A., Stenborg, G., & Lago, A. D. 2017, ApJ, 838, 141 [NASA ADS] [CrossRef] [Google Scholar]
All Tables
All Figures
|
Fig. 1. Mosaic of the four SoloHI tiles taken around the Solar Orbiter science perihelion. The tiles are individually labeled with the start time of each observation. The inner FoV is dominated by the linear straylight pattern from the instrument baffles and oblong-shaped F-corona. The cross-like pattern in the image is caused by the physical gaps on the detector between tile boundaries. A grid of the HPC coordinates is overlaid on the image. The sign of the elongation (x-coordinate) is negative because the FoV is in the anti-ram direction of the spacecraft. |
| In the text | |
|
Fig. 2. Location of Solar Orbiter in HEE coordinates at the onset of the various events alongside the approximate SoloHI FoV at each time. For each event, the spacecraft is consistently near 0.32 au, meaning that the SoloHI FoV is roughly 6 − 50 R⊙, as shown with the dashed lines coming from the spacecraft. The arrows indicate the longitude of the active region at the time of the associated flare, also shown in Table 2. These do not necessarily coincide with the direction of propagation of the CME. The dashed circles represent intervals of 0.25 au from the Sun. The solid black ellipse is the orbit of Solar Orbiter. The Earth and STEREO-A are also shown for reference. The position of the Earth can be taken for that of LASCO. The solid circles representing the various objects are not to scale. |
| In the text | |
|
Fig. 3. SDO/HMI magnetogram from 28 March 2022 20:03:29 UT. The active regions are labeled with NOAA designations. The grid lines represent 15° in Stonyhurst longitude and latitude. |
| In the text | |
|
Fig. 4. Roughly cotemporal images of the 28 March CME from SoloHI and the SECCHI instrument suite. To highlight the common FoV, images from all SoloHI tiles and COR2 and HI1 are projected onto identical grids, covering 6–50 R⊙ in the radial direction and −22 to 22 R⊙ in the y-direction. The SoloHI images are flipped from their standard viewing direction to facilitate comparison. All images from every instrument are processed with a running ratio byte-scaled to a range of 0.98–1.02. The times given in the SoloHI frames correspond to the time of the tile 1 image, and the other tiles are the closest frame to that tile 1 image. Similarly, SECCHI times are based on COR2 timing, and the closest HI1 frame was selected. Late in the day, the second CME becomes visible at the inner part of the FoV. Movies of the projected fields of view used to generate these panels are provided online for both SECCHI and SoloHI, covering the entire period of 28 March to April 2. |
| In the text | |
|
Fig. 5. Roughly cotemporal images of the 28 and 29 March CMEs from SoloHI and the SECCHI instrument suite. To highlight the common FoV, images from all SoloHI tiles and COR2 and HI1 are projected onto identical grids, covering 6–50 R⊙ in the radial direction and −22 to 22 R⊙ in the y-direction. The SoloHI images are flipped from their standard viewing direction to facilitate comparison. Features of note are highlighted in the earliest frame in both instruments to facilitate tracking these features in the frames. All images from every instrument were processed with a running ratio byte-scaled to a range of 0.98–1.02. The times given in the SoloHI frames correspond to the time of the tile 1 image, and the other tiles are the closest frame to that tile 1 image. Similarly, SECCHI times are based on COR2 timing, and the closest HI1 frame was selected. Movies of the projected fields of view used to generate these panels are provided online for both SECCHI and SoloHI and cover the entire period of 28 March to 2 April. |
| In the text | |
|
Fig. 6. SoloHI height vs. time map for 28 and 29 March. The map is generated by taking a strip of images at a given position angle, in this case, 86° from solar north, and stacking each time step together. The extended horizontal black line is the boundary between detectors. The y-axis is the radial distance in R⊙. The features highlighted in Fig. 4 are also noted here, but without differentiating the multiple fronts seen later in the period. The data gaps caused by the instrument shutting off during a spacecraft maneuver are also highlighted. |
| In the text | |
|
Fig. 7. SECCHI height vs. time map for 28 and 29 March. The map is generated by taking a strip of images at a given position angle, in this case, 274° from solar north, and stacking each time step together. The position angle differs from the SoloHI position angle in Fig. 6 because the observers on the different spacecraft observe from opposite directions. The y-axis is the radial distance in R⊙. |
| In the text | |
|
Fig. 8. Roughly cotemporal images of the 30 March CME from SoloHI and the SECCHI instrument suite. To highlight the common FoV, images from all SoloHI tiles and COR2 and HI1 are projected onto identical grids, covering 6–50 R⊙ in the radial direction and −22 to 22 R⊙ in the y-direction. The SoloHI images are flipped from their standard viewing direction to facilitate comparison. Features of note are highlighted in the earliest frame in which they are all visible in both instruments to facilitate tracking these features in the frames. All images from every instrument were processed with a running ratio byte-scaled to a range of 0.98–1.02. The times given in the SoloHI frames correspond to the time of the tile 1 image, and the other tiles are the closest frame to that tile 1 image. Similarly, SECCHI times are based on COR2 timing, and the closest HI1 frame was selected. Movies of the projected FoVs used to generate these panels are provided online for both SECCHI and SoloHI covering the entire period of 28 March to 2 April. |
| In the text | |
|
Fig. 9. SoloHI height vs. time map for 30 and 31 March. The map is generated by taking a strip of images at a given position angle, in this case, 86° from solar north, and stacking each time step together. The extended horizontal black line is the boundary between detectors. The y-axis is the radial distance in R⊙. The features highlighted in Fig. 8 are also noted here, as are various pointing changes caused by the spacecraft. Notably, the location of the tracks seem unaffected by these changes. |
| In the text | |
|
Fig. 10. SECCHI height vs. time map for 30 and 31 March. The map is generated by taking a strip of images at a given position angle, in this case, 274° from solar north, and stacking each time step together. The position angle differs from the SoloHI position angle in Fig. 9 because the observers on the different spacecraft observe from opposite directions. The y-axis is the radial distance in R⊙. |
| In the text | |
|
Fig. 11. Roughly cotemporal images of the 2 April CME from SoloHI and the SECCHI instrument suite. To highlight the common FoV, images from all SoloHI tiles and COR2 and HI1 are projected onto identical grids, covering 6–50 R⊙ in the radial direction and −22 to 22 R⊙ in the y-direction. The SoloHI images are flipped from their standard viewing direction to facilitate comparison. Features of note are highlighted in the earliest frame in both instruments to facilitate tracking these features in the frames. All images from every instrument were processed with a running ratio byte-scaled to a range of 0.98–1.02. The times given in the SoloHI frames correspond to the time of the tile 1 image, and the other tiles are the closest frame to that tile 1 image. Similarly, SECCHI times are based on COR2 timing, and the closest HI1 frame was selected. Movies of the projected FoVs used to generate these panels are provided online for both SECCHI and SoloHI covering the entire period of 28 March to 2 April. |
| In the text | |
|
Fig. 12. Roughly cotemporal images of the 2 April CME from SoloHI and the SECCHI instrument suite, as well as LASCO. To highlight the common FoV, images from all SoloHI tiles, COR2/HI1 and C3, are projected onto identical grids, covering 6–30 R⊙ in the radial direction and −12 to 12 R⊙ in the y-direction. The SoloHI images are flipped from their standard viewing direction to facilitate comparison. All images from every instrument are processed with a running ratio byte-scaled to a range of 0.98–1.02. The times given in the SoloHI frames correspond to the time of the tile 1 image, and the other tiles are the closest frame to that tile 1 image. Similarly, SECCHI times are based on COR2 timing, and the closest HI1 frame was selected. Movies of the projected FoVs used to generate these panels are provided online for C3, SECCHI and SoloHI covering the entire period of 28 March to 2 April. |
| In the text | |
|
Fig. 13. SoloHI elongation vs. time map for 2 and 3 April. The map is generated by taking a strip of images at a given position angle, in this case, 94° from solar north, and stacking each time step together. The y-axis is the radial distance in R⊙. The features highlighted in Fig. 11 are also noted here. |
| In the text | |
|
Fig. 14. SECCHI height vs. time map for 2 and 3 April. The map is generated by taking a strip of images at a given position angle, in this case, 266° from solar north, and stacking each time step together. The position angle differs from the SoloHI position angle in Fig. 13 because the observers on the different spacecraft observe from opposite directions. The y-axis is the radial distance in R⊙. |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.