| Issue |
A&A
Volume 677, September 2023
|
|
|---|---|---|
| Article Number | A40 | |
| Number of page(s) | 9 | |
| Section | Astronomical instrumentation | |
| DOI | https://doi.org/10.1051/0004-6361/202346182 | |
| Published online | 31 August 2023 | |
GRBAlpha: The smallest astrophysical space observatory
I. Detector design, system description, and satellite operations
1
Konkoly Observatory, Research Centre for Astronomy and Earth Sciences,
Konkoly-Thege M. út 15-17,
1121
Budapest, Hungary
e-mail: This email address is being protected from spambots. You need JavaScript enabled to view it.
2
Hiroshima University, School of Science,
1-3-1 Kagamiyama,
Higashi-Hiroshima, Japan
3
Department of Theoretical Physics and Astrophysics, Faculty of Science, Masaryk University,
Kotlárská 267/2,
Brno
611 37, Czech Republic
4
Spacemanic Ltd,
Jablonec 110,
900 86
Jablonec, Slovakia
5
Faculty of Aeronautics, Technical University of Košice,
Rampová 1731/7,
040 01
Košice, Slovakia
6
Department of Radio Electronics, Faculty of Electrical Engineering and Communication, Brno University of Technology,
Technická 3058/10,
616 00
Brno-Královo Pole, Czech Republic
7
Needronix Ltd,
Geologická 1,
821 06
Bratislava, Slovakia
8
Department of Physics, Nagoya University,
Furo-cho, Chikusa-ku,
Nagoya
464-8601, Japan
9
EDIS vvd.,
Rampová 7,
041 21
Košice, Slovakia
10
INAF Istituto di Astrofisica Spaziale e Fisica Cosmica,
via Bassini 15,
20133
Milano, Italy
11
Institute of Earth Physics and Space Science (EPSS),
Csatkai E. u. 6-8,
9400
Sopron, Hungary
12
Department of Physics and Astronomy, Universiteit Gent,
Proeftuinstraat 86,
9000
Gent, Belgium
13
School of Science, Kyoto University,
1 Matsugasakihashigami-cho, Sakyo-ku,
Kyoto, Japan
14
Eötvös Loránd University, Institute for Physics,
Pázmány Péter stny. 1/A,
Budapest, Hungary
15
Wigner Research Centre for Physics,
Konkoly-Thege Miklós út 29-33,
1121
Budapest, Hungary
16
Department of Physics, Rikkyo University,
3-34-1 Nishi-Ikebukuro, Toshima-ku,
Tokyo, Japan
17
Department of Theoretical Physics, Institute of Physics, Budapest University of Technology and Economic,
M˝uegyetem rkp. 3,
1111
Budapest, Hungary
18
MTA-BME Quantum Dynamics and Correlations Research Group, Budapest University of Technology and Economics,
M˝uegyetem rkp. 3,
1111
Budapest, Hungary
19
Department of Earth and Space Science, Osaka University,
1-1 Machikaneyamacho, Toyonaka,
Osaka, Japan
20
Institute of Space and Astronautical Science, Japan Aerospace Exploration Agency,
3-1-1 Yoshinodai, Chuo-ku,
Sagamihara, Japan
21
Tokyo University of Science,
2641
Yamazaki, Noda, Chiba, Japan
Received:
18
February
2023
Accepted:
27
March
2023
Abstract
Aims. Since it launched on 22 March 2021, the 1U-sized CubeSat GRBAlpha operates and collects scientific data on high-energy transients, making it the smallest astrophysical space observatory to date. GRBAlpha is an in-orbit demonstration of a gamma-ray burst (GRB) detector concept suitably small to fit into a standard 1U volume. As was demonstrated in a companion paper, GRBAlpha adds significant value to the scientific community with accurate characterization of bright GRBs, including the recent outstanding event of GRB 221009A.
Methods. The GRB detector is a 75 × 75 × 5 mm CsI(Tl) scintillator wrapped in a reflective foil (ESR) read out by an array of SiPM detectors, multi-pixel photon counters by Hamamatsu, driven by two separate redundant units. To further protect the scintillator block from sunlight and protect the SiPM detectors from particle radiation, we applied a multi-layer structure of Tedlar wrapping, anodized aluminium casing, and a lead-alloy shielding on one edge of the assembly. The setup allows observations of gamma radiation within the energy range of 70–890 keV with an energy resolution of ~30%.
Results. Here, we summarize the system design of the GRBAlpha mission, including the electronics and software components of the detector, some aspects of the platform, and the current semi-autonomous operations. In addition, details are given about the raw data products and telemetry in order to encourage the community to expand the receiver network for our initiatives with GRBAlpha and related experiments.
Key words: instrumentation: detectors / space vehicles: instruments / gamma rays: general
© The Authors 2023
 Open Access article, published by EDP Sciences, under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Open Access article, published by EDP Sciences, under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This article is published in open access under the Subscribe to Open model. This email address is being protected from spambots. You need JavaScript enabled to view it. to support open access publication.
1 Introduction
GRBAlpha is an in-orbit demonstration mission of a gamma detector system suitably small to fit into a 1U CubeSat size, having an approximate dimension of 10 × 10 × 11cm. In this experiment, we validate our concept of employing such small detector systems for extracting astrophysical data related to gamma-ray bursts (GRBs; Pál et al. 2020; Řípa et al. 2022a). One of the most recent findings of GRBAlpha is the characterization of GRB 221009A (Veres et al. 2022; Lesage et al. 2022), an exceptionally bright and long gamma-ray burst reported first by the Fermi Gamma-ray Burst Monitor (GBM). We note here that this event was also detected by a series of other instruments, including AGILE/GRID (Piano et al. 2022), AGILE/MCAL (Ursi et al. 2022), BepiColombo/MGNS (Kozyrev et al. 2022), Insight-HXMT & SATech-01/GECAM-C (HEBS; An et al. 2023), INTEGRAL/SPI-ACS (Gotz et al. 2022), Konus-WIND & SRG/ART-XC (Frederiks et al. 2023), MAXI & NICER (Williams et al. 2023), Solar Orbiter/STIX (Xiao et al. 2022), STPSat-6/SIRI-2 (Mitchell et al. 2022), and XMM-Newton (Tiengo et al. 2023). As a comparatively small detector, GRBAlpha provided an unsaturated observation (Řípa et al. 2022b), and therefore allowed the scientific community to accurately obtain the peak flux of the event (Řípa et al. 2023).
In this paper, we present a description of the detector subsystem, the satellite platform, the operations scheme and the data downlink management. With its mission concept, involvement of students, and implementation of onboard transponder features the satellite gained the support of the radio amateur community and had an International Amateur Radio Union (IARU) coordination for downlink telemetry frequency in the UHF band1. Such a world-wide community can be extremely valuable for GRB astrophysics, due to the low latency of data downlinks for various types of orbits. In order to meet our commitments toward the amateur radio community, an extensive description is included in this paper about the data format related to the telemetry structure and the process required to convert raw data streams into a scientifically relevant format. In order to further extend the available data types for downlink and upgrade the scientific onboard software in accordance, free code points are still available in the data stream to preserve backward compatibility and attain a forward compatibility in the ground segment components.
The structure of the paper is as follows. In Sect. 2, we describe the detector structure used for monitoring GRBs, including the mechanical configuration of the detector, the analog and digital components of the electronics, the onboard digital signal processing (DSP) scheme, and the structure of the data streams provided by the DSP block as it is saved on board and retrieved from the satellite. In Sect. 3, we give the core components of the satellite platform, while in Sect. 4 we present the currently implemented operations scheme, including data formats used for downlink. We give the results from the commissioning of this satellite in Sect. 5, while we give a brief summary and plans about the future onboard payload software upgrade in Sect. 6.
2 Detector structure
In this section, we summarize the design of the satellite main payload (i.e., the scientific detector assembly) and the format of the data provided by (and downloaded from) the detector electronics. The details of the integration of the detector into the satellite platform are described in Sect. 3.
2.1 Scintillator and MPPCs
As stated in Pál et al. (2020), the core of the detector design is a thallium activated cesium-iodine crystal, having a size of 75 × 75 × 5 mm. We applied an enhanced specular reflector (ESR) wrapping around the scintillator, with the exception of a small area of the crystal where the multi-pixel photon counters (MPPCs) or MPPC silicon photomultipliers (SiPMs) are attached. A linear array of 2 × 4 S13360-3050PE MPPCs is mounted on a 60 × 5 mm printed circuit board (PCB). This assembly is then wrapped into a black Tedlar (DuPont TCC15BL3) layer, which prevents stray light leaking from outside both to the detector crystal and the MPPC SiPMs. In addition to the aluminum enclosure, we mounted a lead alloy (PbSb3) shielding at the side of the detector assembly where the MPPCs are located. The steps of the detector assembly are displayed in the panels of Fig. 1.
2.2 Analog and digital electronics
The layout of detector electronics just prior to final integration is exhibited in Fig. 2. To have a greater flexibility in the system design, the analog frontend electronics are mounted on a separate daughterboard. On this board the high-voltage reverse bias supply is controlled via a digital–analog converter (DAC) and provides an adjustable output voltage between 45 and 60 V. Current flowing through the biased MPPCs is proportional to the amount of light detected by the photon counters. After being sensed with an appropriate resistor, the signal is driven into the analog signal chain formed by a preamplifier and the pulse-shaping circuitry. With the appropriately chosen resistor–capacitor (RC) networks, the pulse is widened to have a width that can be fully sampled by the analog-digital converter (ADC) without distorting its characteristics (see Fig. 3 for more details). Further components on the analog daughterboard are an I2C separator for the DAC and an additional power supply that provides the required voltage levels (±5 V) for the amplifiers and the shaping circuitry (see also Torigoe et al. 2019 for further details).
Data acquisition is controlled directly by a field-programmable gate array (FPGA). The real-time processing of the FPGA is ensured by an embedded system-on-a-chip architecture, where both the interface logic toward the 12-bit ADC and the communication lines toward the satellite are attached to a soft microprocessor (soft CPU). This embedded CPU allows high-level programming directly within the FPGA and it is powerful enough to run a FreeRTOS-based operating system at the same time. Communication interfaces connected to the FPGA are a full-duplex universal asynchronous receiver-transmitter (UART) and an inter-integrated circuit (I2C) bus; the primary interface is provided by the UART line, while I2C is used as a cold spare at the present implementation.
The main data acquisition mode supported by the FPGA is a dual-channel histogram accumulator. The waveform of the analog signal chain is continuously sampled with an 1.5 µs period (666kSPS rate) by the ADC attached to the FPGA. During the detection of a burst of optical photons, the digital logic is triggered and provides a number proportional to the energy of the incident gamma photon. The counter associated with the appropriate bin in the active histogram is then increased by one. In parallel with this accumulation, the passive histogram can be read out and can also be reset after data are read. At the end of the exposure the roles of the two histogram channels are swapped within a single clock cycle, providing a 100% duty cycle for the detector. In practice, the embedded block RAM s associated with both of these (otherwise identical) histograms are 32 bit wide and have a depth of 256. This setup allows a high instrumental resolution for the energy spectra as well as long exposure times without any integer overflow. On the other hand, the data transfer rate between the FPGA and the main microcontroller unit (MCU) allows exposure times as short as 20 ms even at the highest spectral resolution.
In the current implementation, FPGA data acquisition cycles are actively controlled by a MCU. This ARM Cortex-M0 MCU core and the attached peripherals perform further processing and time-tagging of the signal, providing a temporary storage area before downlink and interfacing the detector system to the platform components such as the onboard computer and the radio transceivers.
Before starting routine operations (e.g., after power cycling) the payload enters a bootloader state, and can only be started by sending the appropriate telecommands. This setup, along with the reconfiguration of the FPGA bitstream, allows us smooth and safe system-level operations (as shown in Fig. 4). Moreover, the system is capable of receiving upgraded firmware images during routine operations including the cases when scientific data acquisition is ongoing.
 |
Fig. 1 Structure of the detector shown as a series of photos from the assembly procedure. Top: two scintillator crystals, flight model and flight spare, wrapped in ESR foil (with the exception of the positions for the MPPC arrays). Second: PCB with two multi-pixel photon counter (MPPC by Hamamatsu) SiPM sensor arrays and thermometers. Third: sensor array fixed onto the crystal. Fourth: one of the steps used to apply the Tediar wrapping as a light trap. Fifth: enclosure with the flex cables, side view. Bottom: mounting the lead shielding at the side of the detector where the MPPC arrays are. |
 |
Fig. 2 Payload components of the GRBAlpha nano satellite. The numbers indicate the daughterboard containing the analog and mixed-signal components for payload unit #2: 1 (red): adjustable high-voltage supply for MPPC reverse biasing, shielded; 2 (blue): Preamplifier and signal shaping circuitry; 3 (green): analog-digital converter; 4 (magenta): High-voltage control logic. The letters indicate the main PC/104 board with the digital control and signal processing parts for payload unit #1 : A (cyan): microcontroller unit; B (lilac): FPGA configuration FRAM, also used as a secondary staging area for firmware upgrades; C (yellow): FPGA responsible for the interface between the mixed-signal components on the daughterboard and the MCU. The PC/104 system bus connector can be seen at the top right of the figure. This photo was taken during the integration of the satellite when the scintillator block was attached electrically to the daughterboards using the white-blue flex cables. |
 |
Fig. 3 Block-level schematics of the analog signal chain between the MPPC output and the ADC. This two-stage amplifier is formed by a traditional charge sensitive amplifier with R1C1 = 3.3 ms decay constant and an RC-CR shaping amplifier τ = 2.2 μs. |
Self-synchronizing variable-length coding employed in the scientific data streams of GRBAlpha onboard units, and also found in the telemetry format.
 |
Fig. 4 System-level modes of operations of the GRBAlpha payload. After the cold start, the microcontroller unit enters bootloader mode, but is still able to fully access and control the data acquisition FPGA. Once booted, regular measurements can instantly be started; however, FPGA configuration is still possible at the same time if needed. This setup allows the on-the-fly upgrade of both the MCU software and the FPGA bitstream in a safe manner; both binary images can be uploaded to the staging areas during routine operations. In the diagram, black arrows are state transitions, red arrows denote state changes, while green arrows imply state queries. Neither of the state transitions on the MCU side nor the assertion of FPGA reset state is done automatically by the system; it is only possible by telecommands. Therefore, boot loops are not possible in this setup. If an invalid binary image is uploaded to the MCU, a watchdog reset and/or power cycling will start it again in bootloader mode, allowing the detailed examination of the situation. In the case of a failure in the FPGA bitstream upgrade, the FPGA enters to invalid mode, continuously driving its “configuration done” output low. This is detected by the MCU which can then put it back into reset state for recovery. |
2.3 Data stream
The onboard storage and telemetry stream both employ a self-synchronizing variable-length code. In addition to the byte stream, the individual code points also form a self-synchronizing pattern at the block level, allowing decoders to unambiguously extract data even from smaller portions. This sequence is optimized for storing spectral count rates with Poisson statistics and finding weak signals above a small background.
The symbols (code points) encoded in the raw byte stream are unsigned integers: the higher the integer number, the greater the number of bytes used to store. On the other hand, this variable length encoding allows the presence of overlong sequences; within an overlong code small numbers are stored in more bytes than the minimum number of bytes needed for storage. Table 1 summarizes the currently employed code space used by the payload storage system and data streams, including the overlong sequences. For instance, the number 42 is small enough to be stored in one byte (0×2A), but it is allowed to be stored in two bytes (0×40 0×AA), three bytes (0×60 0×80 0×AA), or more. Such overlong characters represent block-level synchronization patterns, and its code space also includes metadata about the upcoming block. As listed in Table 1, a maximum of 30-bit numbers are presently supported, but there still is a 2-bit wide unused self-synchronization code point space for further extensions if larger integers and/or other types of data are needed to be transmitted. The rule of thumb is that one byte is needed to store six bits of information, while data equivalent to eight bits are interleaved for block-level synchronization. However, these bits still encode further information regarding the type of the following block (see Table 2 for the currently employed list of synchronization blocks).
3 Satellite platform and system design
The mechanical construction of GRBAlpha follows the standards defined by the CubeSat specifications. A 1U form factor has a dimension of 100 × 100 × 113.5 mm; however, lateral extensions are permitted in the X± and Y± sides up to 6.5 mm (CubeSat Design Specification 2022). The full GRBAlpha stack is exhibited in Fig. 5 along with the reference frame also involved in the detector modeling. The stack weights 1.2 kg in total and the total amount of available power averaged over one orbit is 1W.
The primary satellite components found in the 1U-sized stack are connected using the de facto standard PC/104 connector system. This connector system distributes the power from the switchable power supply and wires the three independent internal communication interfaces between the payload electronics, onboard computer, global navigation satellite system (GNSS) receiver, sensor board, radio transceivers, and the power supply. While GRBAlpha is not equipped with an active attitude control system, it has permanent magnets on board as well as patches of magnetically soft material for passive attitude stabilization and attitude information is obtained using MEMS gyroscopes, magnetometers, and sun sensors at the same time.
Radio communication for data downlink incorporates a Gaussian frequency-shift keying (GFSK) modulation with a nominal baud rate of 9600 where individual radio packets (corresponding to one packet on the transport protocol layer) are encapsulated within the High-level Data Link Control (HDLC) framing, in accordance with the specifications defined by the AX.25 link layer. Furthermore, a linear feedback shift register is applied in addition to the HDLC stream with tap points defined in accordance with the G3RUH packet radio modem design. This is done to further whiten the GFSK radio signal, and to therefore allow many 0 ↔ 1 transitions for asynchronous clock recovery. Telemetry beacons are either HDLC frames or frames with additional headers defined by the AX.25 protocol. Telemetry beacons are then automatically decoded and uploaded to the public dashboard of GRBAlpha2, while HDLC frames are also diverted to the console during interactive operations (see Sect. 4).
The uncontrolled rotation of GRBAlpha provides a nearly homogeneous temperature distribution within the system. The detector temperature (see Fig. 1, second picture) varies between −5 and +15°C, while the most exposed parts (e.g., the solar panels) have a temperature between −20 and +25 °C.
Data stream synchronization patterns and their respective interpretations for integers encoded in an overlong form.
 |
Fig. 5 Stack of GRBAlpha and the reference frame with respect to the satellite. From top to bottom: chasing of the gamma detector, gamma detector payload electronics (see also Fig. 2), onboard computer and GNSS receiver, sensor board, power supply, radio transceivers, and antenna déployer. |
4 Operations and data downlink
Using the currently available storage configurations, GRBAlpha is operating in a semi-autonomous mode. Individual observing runs are configured and queued manually during satellite contacts, while data retrieval is either controlled interactively or files (and/or file fragments) are scheduled for further drops above designated stations. The interactive control uses simplex stations; telecommanding is performed via an uplink station in Bankov, near Kosice, Slovakia, while telemetry packets are received and forwarded to the console from two receiver stations located at the Piszkéstető Observatory3,4, Hungary, and in Jablonec5, Slovakia. Simplex stations eliminate the need of RF power-switching circuitry, greatly simplifying the station design, while two receiver stations provide nearly 100% packet decoding during interactive sessions, compensating for the transmission fading caused by the onboard dipole antenna. During routine operations, the net scientific data downlink daily rate is around ~200kB; however, with proper selection of data drops, this daily data volume could go as high as ~1 MB while still maintaining a positive power balance.
4.1 Onboard storage
GRBAlpha implements two independent forms of onboard data storage schemes. First, the onboard computer allows the storage of arbitrary but small data chunks in a structure known as the DataKeeper (DK). DK is capable of storing chunks received by any node on the satellite, including itself (for collecting platform-specific housekeeping data) and the payload nodes. DK has been designed to work in conjunction with packet radio-based downlink, and the size of the fragments is adjusted in accordance with the maximum individual radio packet size. However, DK relies on the data link layer between the satellite and the ground station(s) during retrieval, and therefore packets that are lost during the transfer need to be requested again if the assembly was not successful. This scheme allows simple operations; however, an excessive number of transactions are needed to compensate for the intrinsic data loss.
In addition to DK, both nodes of the GRB payload units have their own data storage devices, allowing independent (and optionally redundant) data handling. The payload firmware allocates a filesystem distributed along its storage devices; data, including routine measurements, can also be stored in separate files, and during downlink files can be downloaded, either fully or partially. This last option is the preferred one during the extraction of individual GRB events (detected by other missions) where the trigger time is known. The total amount of onboard storage capacity is 2 MB for the DK, while it is 2 × (2 + 64) MB for the GRB payload units. The data storage scheme is displayed in Fig. 6.
 |
Fig. 6 Scientific data flow within the GRBAlpha payload and platform components. Black arrows show the direction of the signal path originating from the MPPCs attached to the detector. The signal streams processed by the MCU are then being routed into various directions, depending on the currently running data acquisition configuration. Red arrows represent DataKeeper packets while blue arrows represents individual files that are retrieved either directly as file fragments or scrambled for forward error correction. File fragments can also be transferred to DK for employing the DK-based retrieval. Green arrows represent the copying functionality between the two payload nodes. This functionality allows both scientific data transfer between the two nodes (currently only for redundancy at block level) and aiding firmware upgrade by cloning either the main program binary image or the FPGA bitstream image if needed. |
4.2 Data downlink
Files storing scientific or auxiliary data are saved in the onboard file system of the payload units. Files are then transferred to ground either via the DataKeeper area of the onboard computer or directly via the radio module. Commonly, these individual files or even portions of these files containing relevant scientific information (e.g., a few dozen minutes of recording before and after a gamma-ray burst) are too large to fit into a single AX.25 radio packet. In this case, the file F is fragmented into smaller chunks (i.e., F = {ƒ0, ƒ1,…, ƒn−1}, where n is the total number of chunks). These chunks are, in practice, set to k = 128 bytes, so  where SF is the size of file F in bytes. Expecting no data loss (or when these file fragments are transferred to DK), the fragments fi are transferred sequentially without any further processing.
where SF is the size of file F in bytes. Expecting no data loss (or when these file fragments are transferred to DK), the fragments fi are transferred sequentially without any further processing.
Due to the checksum field embedded in the radio packets, a single packet is either received completely or fully discarded. Therefore, any type of packet radio forward error correction (FEC) should be implemented at a higher level. In order to add such a FEC code at the packet level, the individual fragments are scrambled and converted via a partial Vandermonde transformation over the Galois field GF (232). In our practice, a file fragment fi is partitioned into a series of 32-bit unsigned integers (i.e.,  , where ℓ runs from ℓ = 0 to L−1 = 31 for a 128-byte long fragment). A packet
, where ℓ runs from ℓ = 0 to L−1 = 31 for a 128-byte long fragment). A packet  sent to the ground is then computed as
sent to the ground is then computed as
 (1)
(1)
where R is the length defining the partial Vandermonde transformation and Ki is a key associated with this scrambled packet gi. The multiplication involved in the computation of Kj and during the evaluation of  is defined over the finite field GF(232), and therefore it cannot be implemented as a single binary multiply operation. If R = 1, Eq. (1) yields no additional scrambling, and it is equivalent to the sequential file transfer since
is defined over the finite field GF(232), and therefore it cannot be implemented as a single binary multiply operation. If R = 1, Eq. (1) yields no additional scrambling, and it is equivalent to the sequential file transfer since  for all possible values of Ki ϵ GF (232). On the other hand, if R = n and Ki = i, this equation is equivalent to a multiplication of the input vector with the Vandermonde matrix
for all possible values of Ki ϵ GF (232). On the other hand, if R = n and Ki = i, this equation is equivalent to a multiplication of the input vector with the Vandermonde matrix 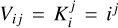 , providing full redundancy during the transfer; receiving n packets in any combination will allow the receiver to assemble the original file. However, letting R be as big as n, the computation of Eq. (1) requires too much computing power; in the practice of GRBAlpha operations we use R = n transfers only for files containing calibration spectra required to characterize detector degradation when the sizes of these files are on the order of a few kilobytes (and not hundreds of kilobytes or megabytes). During a download request, the GRBAlpha payload firmware is also capable of creating a randomized series of i indices in order to further scramble the file transfer. Upon reception of the
, providing full redundancy during the transfer; receiving n packets in any combination will allow the receiver to assemble the original file. However, letting R be as big as n, the computation of Eq. (1) requires too much computing power; in the practice of GRBAlpha operations we use R = n transfers only for files containing calibration spectra required to characterize detector degradation when the sizes of these files are on the order of a few kilobytes (and not hundreds of kilobytes or megabytes). During a download request, the GRBAlpha payload firmware is also capable of creating a randomized series of i indices in order to further scramble the file transfer. Upon reception of the  fragments, it is both necessary and sufficient to include the length R, the key Ki, the fragment offset index i, and the total number of fragments n (or, equivalently, the file size) within the same telemetry packet. The net size of the fragment, L is simply taken from the packet size. We found this feature important due to the uncontrolled rotation of the satellite. Specifically, by employing a single receiver station, the transmission could fade as long as five to ten seconds with a period of a few minutes. In this case, adjacent fragments are completely missing from the stream even from comparatively large values of R, and this scenario would make the inversion of the partial Vandermonde matrix impossible.
fragments, it is both necessary and sufficient to include the length R, the key Ki, the fragment offset index i, and the total number of fragments n (or, equivalently, the file size) within the same telemetry packet. The net size of the fragment, L is simply taken from the packet size. We found this feature important due to the uncontrolled rotation of the satellite. Specifically, by employing a single receiver station, the transmission could fade as long as five to ten seconds with a period of a few minutes. In this case, adjacent fragments are completely missing from the stream even from comparatively large values of R, and this scenario would make the inversion of the partial Vandermonde matrix impossible.
For example, such a file download can be seen in the SatNOGS observation 71341886, where (due to fading) ~840 packets were retrieved out of the nearly ~1000 packets transmitted; however, the above-mentioned scrambling and partial Vandermonde transformation with the length parameter of R = 8 was sufficient to easily recover the n = 600 fragments. In practice, even a smaller overhead is sufficient for downlink; our experience from many hundreds of such downloads is that the minimum additional redundancy needed is around ~15%, which accounts both for the packet loss due to transmission fading and for the reception of fragments that are not linearly independent over GF (232). This level of redundancy is equivalent to the overhead of an RS(255,223) Reed-Solomon code. For reference, we give an implementation of the this fragment unpacking, FEC assembly, and scientific data decoding on the project’s website7. Raw packets retrieved are converted into an intermediate JSON (JavaScript Object Notation) representation (grbalpha-downlink.sh), which is then assembled using the FEC method described above (asmgetf), and then the assembled scientific streams are decoded into a standardized format (daq-decode.sh).
4.3 Data products
By implementing the process of retrieval described in Sect. 4.2, data are available to the community in the format of a JSON representation similar to the listing displayed in Fig. 7. The count spectra in JSON files are also converted to FITS8 files following the OGIP FITS Standards, which can be used by common spectral analysis tools such as the X-ray spectral fitting package XSPEC9 (Arnaud 1996). Current and typical data acquisition modes include a 1 s cadence with 4 or 16 energy channels and calibration cycles that are run for 5 × 60 s with full resolution of 256 channels. Within this representation, one JSON record includes the photon counts for each energy bin, and the precise timestamps and settings related to binning are also interleaved. Other settings for the data acquisition, including exposure times, cutoff value settings (for excluding the pedestal before binning), and detector housekeeping data, are interleaved with distinctive JSON object-type fields. Due to the extensible nature of the JSON objects, planned data acquisition modes (e.g., parallel retrieval of data streams, and long exposure and high spectral resolution combined with short cadence and low resolution) can easily be inserted while still being compatible with the current data structure.
 |
Fig. 7 Scientific telemetry streams from GRBAlpha in raw format (upper panel) and decoded format (lower panel, displayed in the form of hierarchical JSON objects and arrays). The corresponding blocks are highlighted accordingly: absolute time instances are highlighted in green, relative time synchronization values are highlighted in blue, data acquisition metadata and housekeeping blocks are purple, spectral measurements are yellow and light gray. Bytes that are out of stream-level synchronization are highlighted with dark red while blocks are out of block-level synchronization are highlighted with orange. The trailing byte is also highlighted as red, denoting a stray byte (however, the full block can also be partially decoded, as it is clear from the JSON form). The data displayed correspond to the second peak of the GRB 221009A event, see also the respective timestamps. Note also that relative timestamps are converted to absolute time instances during the decoding. |
5 Commissioning and early scientific results
Along with a few dozen CubeSat-class missions and larger satellites, GRBAlpha was launched on 22 March 2021 via the support of GK Launch Services. During commissioning, we performed all of the relevant platform-side tests of the satellite components and uploaded a revised payload firmware that was developed between the satellite integration and the launch. Following the commissioning phase and the modelling of the detector effective area at various energy ranges (Fig. 8), the satellite started to perform dedicated background monitoring observations. The background level in the form of total counts per second as measured throughout the orbits of GRBAlpha is displayed in Fig. 9. Based on these results, the fraction of time when the satellite is able to detect an average GRB with at least a 5σ significance is ~67%. This is the duty cycle on a 550 km polar orbit and at lower altitudes and smaller inclinations the observing efficiency is expected to be higher. As a representative example, the light curve related to the exceptionally bright event of GRB 230307A is displayed in Fig. 10. The background-subtracted version of this light curve is shown in Dafcikova et al. (2023).
While the initial low-energy threshold of the detectors was in the range of 30 keV after launch, the degradation of the Hamamatsu MPPCs remains at an acceptable level, resulting in a low-energy threshold degradation to 60–70 keV after two years of in-orbit operations. A detailed evaluation of the SiPM detector degradation will be a subject of a forthcoming paper (Takahashi et al., in prep.). In addition, we plan to perform further in-orbit adjustments of the bias voltage settings to optimize the performance at lower energies.
If the satellite is operated continuously, the detection rate is approximately one transient every five days. The number of detected long GRBs is, at the time of writing, significantly higher than the number of short GRBs, which might be the result of the relatively long time bins. The initial length of time bins was four seconds, which was recently changed to one second. Further shortening of the employed bins is expected to increase the detection rate of short GRBs.
6 Summary and future upgrade plans
Since its launch and at the time of writing, GRBAlpha has detected and characterized 23 confirmed GRBs, nine solar flares, two soft gamma repeaters (SGRs), and one X-ray binary outburst, including prominent events like GRB 221009a10. In order to further increase and extend the scientific yield, we are planning to continue to tune and optimize the onboard software stack of the system. One of our most important short-term upgrade plans related to the payload software is the inclusion of an onboard trigger system, which would allow autonomous detection of gamma-ray transients by real-time monitoring of the observed count rate. The triggering system would allow independent detection of GRBs and other events without the knowledge of the detection by other missions. Due to the availability of a GNSS receiver, we also plan to connect the GNSS output signals directly to the payload FPGA (Pál et al. 2018) in order to achieve a timing accuracy comparable to the onboard oscillator timing resolution. While an active attitude control is not essential for such a detector type on a small (i.e., transparent) satellite, the knowledge of the attitude is important for the proper interpretation of scientific data. GRBAlpha has on board magnetometers and sun sensors; however, further upgrades are required in order to interleave their corresponding data within the scientific stream. Some of the free code points (see Table 2) are reserved for this purpose. For further missions of similar needs, we developed a procedure involving thermal imaging sensors (Kapás et al. 2021; Takátsy et al. 2022), which is also prepared for in-orbit demonstration (on board a picosatellite platform, see Nanosats Database 2022) and scheduled for launch in June 2023. We also plan to extend the radio telemetry beacons with scientific information in parallel with the extension of FEC within the AX.25 frame itself (and not in addition to AX.25, as in the case of FX.25). These extensions will be reduced to special code patterns (like the Manchester code) due to the presence of bit-stuffing in the HDLC framing.
Other nanosatellites that have been developed to detect GRBs and are expected to be launched in the near future include the Educational Irish Research Satellite 1 (EIRSAT-1), which will carry a gamma-ray module (GMOD) that uses SensL B-series SiPM detectors and a CeBr scintillator (Murphy et al. 2021, 2022). A larger and more ambitious nanosatellite mission is NASA’s BurstCube, a 6U CubeSat carrying a GRB detector made of four CsI scintillators, each with an effective area of 90 cm2 (Racusin et al. 2017). Planned nanosatellite constellations include HERMES, which will initially consist of a fleet of 6 3U CubeSats on a low-Earth equatorial orbit. Their detector will use silicon drift detectors to detect both the X-rays from the sky and the optical photons produced in the GAGG scintillator crystals by gamma-rays (Fiore et al. 2020). The Chinese student-led Gamma-Ray Integrated Detectors (GRID) consists of GRB detectors as secondary payloads on larger 6U Cube-Sats. Six satellites with eight GRID detectors in total have been launched so far, and the plan is to fly the GRB detectors on an additional one to two dozen CubeSats (Wen et al. 2019). One of the most advantageous properties of the employment of a network of satellites is the availability of full-sky coverage, while exhibiting functional redundancy at the same time. The cumulative area can be much larger for a constellation than for an individual satellite. In addition, even simple geometric constraints (e.g., whether the event is being obscured by Earth) and attitude information (e.g., proper compilation of amplitude ratios from distinct detectors being on the same or a different spacecraft) can help the instantaneous localization with the same hardware configuration being tested on GRBAlpha now. Moreover, a timing-based localization is also feasible for such systems, exploiting proper synchronization (Pál et al. 2018; Ohno et al. 2020; Thomas et al. 2023). GRBAlpha itself is a precursor to the CAMELOT constellation. We envision it to contain at least ten 3U CubeSats, each with a geometric detection area eight times larger than that of GRBAlpha (see Werner et al. 2018; Mészáros et al. 2022).
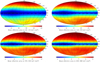 |
Fig. 8 Expected effective detector area with respect to the direction of the incident gamma radiation for various energy ranges: 40−110 keV (top left panel), 110−370 keV (top right panel), 370−630 keV (bottom left panel) and 630−890 keV (bottom right panel). These ϑ (zenith angle, vertical) and φ (azimuth angle, horizontal) plots are displayed in the reference frame of the satellite where Z+ axis (i.e., the face of the detector) is equivalent to the ϑ = 180° angle at the top pole of spherical plots (see also Fig. 5). It is clear that at lower energies, the satellite itself has a transparency around 60−70% while at higher energies it is almost transparent and the structure of the plots is dominated by the geometric cross section of the scintillator crystal. |
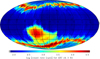 |
Fig. 9 Particle background, extra-galactic X-ray, and secondary (albedo) X-ray background radiation as measured by the detector system of GRBAlpha. The data plotted here were acquired during the commissioning phase and contain nearly two days of continuous measurements along the orbit of GRBAlpha. The northern and southern polar regions and the South Atlantic Anomaly are clearly visible with the elevated background levels. Otherwise, the background level is around 100 counts s−1 in the full spectral range. On this map an equal-area Mollweide geographical projection is used where the prime meridian and the equator cross the center. |
 |
Fig. 10 Light curve observed by and retrieved from GRBAlpha related to the event of GRB 230307A. The trigger is shown with the vertical dashed red line. The total retrieved time span was a complete orbit in this case; therefore, the South Atlantic Anomaly (SAA) and four passages through polar belts are clearly visible (i.e., leaving SAA, entering and leaving the northern and southern polar rings). This prominent event has a comparable amplitude to the increased background level at the polar regions. |
Acknowledgements
We would like to thank our reviewer for the thorough report of our paper and all of the suggestions for improvements. Satellite components and payload development has been supported by the KEP-7/2018 and KEP2/2020 grants of the Hungarian Academy of Sciences and the grant SA-40/2021 of the Eötvös Loránd Research Network, Hungary. We acknowledge the support of the Eötvös Loránd Research Network grant IF-7/2020 for providing financial background for the ground infrastructure. We are grateful to the team developing and operating the SatNOGS network as well as the operators and maintainers of the various stations, especially Brian Yeomans (2433, 2760), David Murphy and the EIRSAT-1 team (2271), Institute for Telecommunication Research, Australia (1382), Utah State University Get Away Special Team (2550) and Small Spacecraft Systems Research Center (SSSRC) at Osaka Metropolitan University (2726). We are also thankful for the many individuals and associations from the radio amateur community providing further housekeeping/telemetry packets received from our satellite. The project has also gained support by the European Union’s Horizon 2020 programme under the AHEAD2020 project (grant agreement no. 871158) and by the MUNI Award for Science and Humanities funded by the Grant Agency of Masaryk University. G.D. is supported by the Ghent University Special Research Funds (BOF) project BOF/STA/202009/040 and the Fonds Wetenschappelijk Onderzoek (FWO) iBOF project BOF20/IBF/124. This work was supported by the Internal Grant Agency of Brno University of Technology, project no. FEKT-S-20-6526. This research has been also supported by JSPS and HAS under Japan-Hungary Research Cooperative Program, JSPS KAKENHI Grant Number 17H06362, 19H01908, and 21KK0051.
References
- An, Z.-H., Antier, S., Bi, X.-Z., et al. 2023, Nat. Sci. Rev., submitted [arXiv:2303.01203] [Google Scholar]
- Arnaud, K. A. 1996, ASP Conf. Ser., 101, 17 [Google Scholar]
- CubeSat Design Specification 2022, CubeSat Design Specification, Revision 14.1, accessed: February 2022 https://static1.squarespace.com/static/5418c831e4b0fa4ecac1bacd/t/62193b7fc9e72e0053f00910/1645820809779/CDS+REV14_1+2022-02-09.pdf [Google Scholar]
- Dafcikova, M., Ripa, J., Pal, A., et al. 2023, GRB Coordinates Network, 33418, 1 [NASA ADS] [Google Scholar]
- Fiore, F., Burderi, L., Lavagna, M., et al. 2020, SPIE Conf. Ser., 11444, 114441R [NASA ADS] [Google Scholar]
- Frederiks, D., Svinkin, D., Lysenko, A. L., et al. 2023, ApJ, 949, L7 [NASA ADS] [CrossRef] [Google Scholar]
- Gotz, D., Mereghetti, S., Savchenko, V., et al. 2022, GRB Coordinates Network, 32660, 1 [NASA ADS] [Google Scholar]
- Kapás, K., Bozóki, T., Dálya, G., et al. 2021, Exp. Astron., 51, 515 [CrossRef] [Google Scholar]
- Kozyrev, A. S., Golovin, D. V., Litvak, M. L., et al. 2022, GRB Coordinates Network, 32805, 1 [NASA ADS] [Google Scholar]
- Lesage, S., Veres, P., Roberts, O. J., et al. 2022, GRB Coordinates Network, 32642, 1 [NASA ADS] [Google Scholar]
- Mészáros, L., Pál, A., Werner, N., et al. 2022, SPIE Conf. Ser., 12181, 121811L [Google Scholar]
- Mitchell, L. J., Phlips, B. F., & Johnson, W. N. 2022, GRB Coordinates Network, 32746, 1 [NASA ADS] [Google Scholar]
- Murphy, D., Ulyanov, A., McBreen, S., et al. 2021, Exp. Astron., 52, 59 [NASA ADS] [CrossRef] [Google Scholar]
- Murphy, D., Ulyanov, A., McBreen, S., et al. 2022, Exp. Astron., 53, 961 [NASA ADS] [CrossRef] [Google Scholar]
- Nanosats Database 2022, MRC-100, https://www.nanosats.eu/sat/mrc-100, accessed: December 2022 [Google Scholar]
- Ohno, M., Werner, N., Pál, A., et al. 2020, SPIE Conf. Ser., 11454, 114541Z [NASA ADS] [Google Scholar]
- Pál, A., Mészáros, L., Tarcai, N., et al. 2018, ArXiv e-prints [arXiv:1806.03685] [Google Scholar]
- Pál, A., Ohno, M., Mészáros, L., et al. 2020, SPIE Conf. Ser., 11444, 114444V [Google Scholar]
- Piano, G., Verrecchia, F., Bulgarelli, A., et al. 2022, GRB Coordinates Network, 32657, 1 [NASA ADS] [Google Scholar]
- Racusin, J., Perkins, J. S., Briggs, M. S., et al. 2017, ArXiv e-prints, [arXiv:1708.09292] [Google Scholar]
- Řípa, J., Pál, A., Ohno, M., et al. 2022a, SPIE Conf. Ser., 12181, 121811K [Google Scholar]
- Řípa, J., Pal, A., Werner, N., et al. 2022b, GRB Coordinates Network, 32685, 1 [Google Scholar]
- Řípa, J., Takahashi, H., Fukazawa, Y., et al. 2023, A&A, 677, L2 [CrossRef] [EDP Sciences] [Google Scholar]
- Takátsy, J., Bozóki, T., Dálya, G., et al. 2022, Exp. Astron., 53, 209 [CrossRef] [Google Scholar]
- Thomas, M., Trenti, M., Sanna, A., et al. 2023, PASA, 40, e008 [NASA ADS] [CrossRef] [Google Scholar]
- Tiengo, A., Pintore, F., Vaia, B., et al. 2023, ApJ, 946, L30 [NASA ADS] [CrossRef] [Google Scholar]
- Torigoe, K., Fukazawa, Y., Galgóczi, G., et al. 2019, Nucl. Instrum. Methods Phys. Res. A, 924, 316 [CrossRef] [Google Scholar]
- Ursi, A., Panebianco, G., Pittori, C., et al. 2022, GRB Coordinates Network, 32650, 1 [NASA ADS] [Google Scholar]
- Veres, P., Burns, E., Bissaldi, E., et al. 2022, GRB Coordinates Network, 32636, 1 [NASA ADS] [Google Scholar]
- Wen, J., Long, X., Zheng, X., et al. 2019, Exp. Astron., 48, 77 [NASA ADS] [CrossRef] [Google Scholar]
- Werner, N., Řípa, J., Pál, A., et al. 2018, SPIE Conf. Ser., 10699, 106992P [NASA ADS] [Google Scholar]
- Williams, M. A., Kennea, J. A., Dichiara, S., et al. 2023, ApJ, 946, L24 [NASA ADS] [CrossRef] [Google Scholar]
- Xiao, H., Krucker, S., & Daniel, R. 2022, GRB Coordinates Network, 32661, 1 [NASA ADS] [Google Scholar]
The list of all GRBAlpha detected transients is available at https://monoceros.physics.muni.cz/hea/GRBAlpha/
All Tables
Self-synchronizing variable-length coding employed in the scientific data streams of GRBAlpha onboard units, and also found in the telemetry format.
Data stream synchronization patterns and their respective interpretations for integers encoded in an overlong form.
All Figures
|
Fig. 1 Structure of the detector shown as a series of photos from the assembly procedure. Top: two scintillator crystals, flight model and flight spare, wrapped in ESR foil (with the exception of the positions for the MPPC arrays). Second: PCB with two multi-pixel photon counter (MPPC by Hamamatsu) SiPM sensor arrays and thermometers. Third: sensor array fixed onto the crystal. Fourth: one of the steps used to apply the Tediar wrapping as a light trap. Fifth: enclosure with the flex cables, side view. Bottom: mounting the lead shielding at the side of the detector where the MPPC arrays are. |
| In the text | |
|
Fig. 2 Payload components of the GRBAlpha nano satellite. The numbers indicate the daughterboard containing the analog and mixed-signal components for payload unit #2: 1 (red): adjustable high-voltage supply for MPPC reverse biasing, shielded; 2 (blue): Preamplifier and signal shaping circuitry; 3 (green): analog-digital converter; 4 (magenta): High-voltage control logic. The letters indicate the main PC/104 board with the digital control and signal processing parts for payload unit #1 : A (cyan): microcontroller unit; B (lilac): FPGA configuration FRAM, also used as a secondary staging area for firmware upgrades; C (yellow): FPGA responsible for the interface between the mixed-signal components on the daughterboard and the MCU. The PC/104 system bus connector can be seen at the top right of the figure. This photo was taken during the integration of the satellite when the scintillator block was attached electrically to the daughterboards using the white-blue flex cables. |
| In the text | |
|
Fig. 3 Block-level schematics of the analog signal chain between the MPPC output and the ADC. This two-stage amplifier is formed by a traditional charge sensitive amplifier with R1C1 = 3.3 ms decay constant and an RC-CR shaping amplifier τ = 2.2 μs. |
| In the text | |
|
Fig. 4 System-level modes of operations of the GRBAlpha payload. After the cold start, the microcontroller unit enters bootloader mode, but is still able to fully access and control the data acquisition FPGA. Once booted, regular measurements can instantly be started; however, FPGA configuration is still possible at the same time if needed. This setup allows the on-the-fly upgrade of both the MCU software and the FPGA bitstream in a safe manner; both binary images can be uploaded to the staging areas during routine operations. In the diagram, black arrows are state transitions, red arrows denote state changes, while green arrows imply state queries. Neither of the state transitions on the MCU side nor the assertion of FPGA reset state is done automatically by the system; it is only possible by telecommands. Therefore, boot loops are not possible in this setup. If an invalid binary image is uploaded to the MCU, a watchdog reset and/or power cycling will start it again in bootloader mode, allowing the detailed examination of the situation. In the case of a failure in the FPGA bitstream upgrade, the FPGA enters to invalid mode, continuously driving its “configuration done” output low. This is detected by the MCU which can then put it back into reset state for recovery. |
| In the text | |
|
Fig. 5 Stack of GRBAlpha and the reference frame with respect to the satellite. From top to bottom: chasing of the gamma detector, gamma detector payload electronics (see also Fig. 2), onboard computer and GNSS receiver, sensor board, power supply, radio transceivers, and antenna déployer. |
| In the text | |
|
Fig. 6 Scientific data flow within the GRBAlpha payload and platform components. Black arrows show the direction of the signal path originating from the MPPCs attached to the detector. The signal streams processed by the MCU are then being routed into various directions, depending on the currently running data acquisition configuration. Red arrows represent DataKeeper packets while blue arrows represents individual files that are retrieved either directly as file fragments or scrambled for forward error correction. File fragments can also be transferred to DK for employing the DK-based retrieval. Green arrows represent the copying functionality between the two payload nodes. This functionality allows both scientific data transfer between the two nodes (currently only for redundancy at block level) and aiding firmware upgrade by cloning either the main program binary image or the FPGA bitstream image if needed. |
| In the text | |
|
Fig. 7 Scientific telemetry streams from GRBAlpha in raw format (upper panel) and decoded format (lower panel, displayed in the form of hierarchical JSON objects and arrays). The corresponding blocks are highlighted accordingly: absolute time instances are highlighted in green, relative time synchronization values are highlighted in blue, data acquisition metadata and housekeeping blocks are purple, spectral measurements are yellow and light gray. Bytes that are out of stream-level synchronization are highlighted with dark red while blocks are out of block-level synchronization are highlighted with orange. The trailing byte is also highlighted as red, denoting a stray byte (however, the full block can also be partially decoded, as it is clear from the JSON form). The data displayed correspond to the second peak of the GRB 221009A event, see also the respective timestamps. Note also that relative timestamps are converted to absolute time instances during the decoding. |
| In the text | |
|
Fig. 8 Expected effective detector area with respect to the direction of the incident gamma radiation for various energy ranges: 40−110 keV (top left panel), 110−370 keV (top right panel), 370−630 keV (bottom left panel) and 630−890 keV (bottom right panel). These ϑ (zenith angle, vertical) and φ (azimuth angle, horizontal) plots are displayed in the reference frame of the satellite where Z+ axis (i.e., the face of the detector) is equivalent to the ϑ = 180° angle at the top pole of spherical plots (see also Fig. 5). It is clear that at lower energies, the satellite itself has a transparency around 60−70% while at higher energies it is almost transparent and the structure of the plots is dominated by the geometric cross section of the scintillator crystal. |
| In the text | |
|
Fig. 9 Particle background, extra-galactic X-ray, and secondary (albedo) X-ray background radiation as measured by the detector system of GRBAlpha. The data plotted here were acquired during the commissioning phase and contain nearly two days of continuous measurements along the orbit of GRBAlpha. The northern and southern polar regions and the South Atlantic Anomaly are clearly visible with the elevated background levels. Otherwise, the background level is around 100 counts s−1 in the full spectral range. On this map an equal-area Mollweide geographical projection is used where the prime meridian and the equator cross the center. |
| In the text | |
|
Fig. 10 Light curve observed by and retrieved from GRBAlpha related to the event of GRB 230307A. The trigger is shown with the vertical dashed red line. The total retrieved time span was a complete orbit in this case; therefore, the South Atlantic Anomaly (SAA) and four passages through polar belts are clearly visible (i.e., leaving SAA, entering and leaving the northern and southern polar rings). This prominent event has a comparable amplitude to the increased background level at the polar regions. |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.