| Issue |
A&A
Volume 674, June 2023
|
|
|---|---|---|
| Article Number | A111 | |
| Number of page(s) | 19 | |
| Section | Planets and planetary systems | |
| DOI | https://doi.org/10.1051/0004-6361/202346101 | |
| Published online | 13 June 2023 | |
Effect of the inclination in the passage through the 5/3 mean motion resonance between Ariel and Umbriel
1
CFisUC, Departamento de Física, Universidade de Coimbra,
3004-516
Coimbra, Portugal
2
IMCCE, UMR8028 CNRS, Observatoire de Paris, PSL Université,
77 Av. Denfert-Rochereau,
75014
Paris, France
e-mail: sergiogomes96@live.com.pt
Received:
7
February
2023
Accepted:
7
April
2023
The orbits of the main satellites of Uranus are expected to slowly drift away owing to tides raised in the planet. As a result, the 5/3 mean motion resonance between Ariel and Umbriel was likely encountered in the past. Previous studies have shown that, in order to prevent entrapment in this resonance, the eccentricities of the satellites must be larger than ~0.01 at the epoch, which is hard to explain. On the other hand, if the satellites experience some temporary capture and then escape, the inclinations rise to high values that are not observed today. We have revisited this problem both analytically and numerically focussing on the inclination, using a secular two-satellite model with circular orbits. We show that if the inclination of Umbriel was around 0.15° at the time of the 5/3 resonance encounter, capture can be avoided in about 60% of the cases. Moreover, after the resonance crossing, the inclination of Umbriel drops to a mean value around 0.08°, which is close to the presently observed one. The final inclination of Ariel is distributed between 0.01° and 0.25° with a nearly equal probability, which includes the present mean value of 0.02°.
Key words: celestial mechanics / planets and satellites: dynamical evolution and stability / planets and satellites: individual: Uranus / planets and satellites: individual: Ariel / planets and satellites: individual: Umbriel
© The Authors 2023
 Open Access article, published by EDP Sciences, under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Open Access article, published by EDP Sciences, under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This article is published in open access under the Subscribe to Open model. Subscribe to A&A to support open access publication.
1 Introduction
The origin of the Uranian satellite system is not yet completely understood and it is still under debate (e.g. Pollack et al. 1991; Szulágyi et al. 2018; Ishizawa et al. 2019; Inderbitzi et al. 2020; Ida et al. 2020; Rufu & Canup 2022). Despite the formation mechanism of the main satellites, their orbits slowly drift away owing to tides raised in the planet (e.g. Peale 1988; Tittemore & Wisdom 1988, 1989, 1990; Pollack et al. 1991; Cuk et al. 2020). Because the orbits do not all evolve at the same pace, they may have encountered several mean motion resonances (MMRs) in their way since their formation about 4.5 Gyr ago. At present, there is no orbital commensurability between these satellites, but MMRs are often invoked to explain some anomalous observations, such as resurfacing events (e.g Dermott et al. 1988; Peale 1988; Tittemore 1990), the current relatively large eccentricities (~0.001) of all satellites (e.g Squyres et al. 1985; Smith et al. 1986; Peale 1988), or the high inclination of Miranda (~4.3°; e.g Tittemore & Wisdom 1989, 1990; Malhotra & Dermott 1990; Verheylewegen et al. 2013; Cuk et al. 2020).
The latest low-order commensurability to have occurred was the 5/3 MMR between Ariel and Umbriel (e.g. Peale 1988; Cuk et al. 2020), which is consistent with recent geologic activity observed in Ariel (e.g. Zahnle et al. 2003; Cartwright et al. 2020). The current free eccentricities still observed also support this possibility (e.g. Jacobson 2014). A detailed study on the passage through this resonance was carried out by Tittemore & Wisdom (1988) using a secular resonant two-satellite planar model with small eccentricities. It was shown that if the 5/3 MMR is approached with eccentricities of both satellites smaller than ~0.01, a long-term capture in resonance is certain. Therefore, in order to evade or skip this resonance, at least one of the eccentricities must have been close to 0.01 at the time. However, Tittemore & Wisdom (1988) recognised that it is very difficult to justify such high initial eccentricity values. Indeed, mutual perturbations between the largest Uranian satellites cannot explain such high values alone (e.g. Dermott & Nicholson 1986; Laskar 1986). Moreover, tidal friction within the satellites circularise the orbits in a short timescale (e.g. Squyres et al. 1985), and so any large eccentricity remnant left by a prior MMR crossing is expected to be quickly eroded.
Ćuk et al. (2020) revisited the passage through the 5/3 MMR using a N-body numerical integrator, which includes the five main satellites, non-planar orbits, and spin evolution. They started their simulations with the current eccentricities and adopted nearly zero inclination for all satellites (< 0.1°). They confirm that low initial eccentricities translate into capture in resonance, which can nevertheless be broken after some time due to some chaotic excitation of the eccentricities. They also observed that all five moons had their inclinations excited during the resonance entrapment. The effect on the inclination is particularly significant in Miranda because it has the smallest mass; however, after leaving the resonance, the remaining four moons were all left with inclination values higher than the current ones. In particular, Ariel and Umbriel acquired inclinations around 1°, which cannot be damped to the current observed mean values of ~0.02° and 0.08°, respectively. (Ćuk et al. (2020) then propose that the inclination of Umbriel can be lowered if its node is involved in a secular spin-orbit resonance with the spin of Oberon (not observed today). However, even if this mechanism works, it would fail to damp the inclinations of the remaining satellites.
Ćuk et al. (2020) suggest that the 5/3 MMR between Ariel and Umbriel can be responsible for the current high inclination of Miranda instead of the crossing of the 3/1 MMR between Miranda and Umbriel (Tittemore & Wisdom 1989, 1990). However, the high inclination values also acquired by Ariel and Umbriel seem difficult to conciliate with the present observed system. A more plausible scenario is that Miranda’s inclination is excited during the Miranda and Umbriel 3/1 MMR crossing, and then Ariel and Umbriel skip the 5/3 MMR without being captured to prevent any damage on the inclinations. The problem with this scenario is that for initial near zero inclination values for both Ariel and Umbriel, at least one of these satellites must have an initial eccentricity larger than 0.01 to avoid entrapment in the 5/3 MMR (Tittemore & Wisdom 1988), which is also challenging to explain.
Since the inclination appears to play an important role in the passage of the 5/3 MMR between Ariel and Umbriel, here we intend to look at this problem with a different perspective. Instead of assuming a coplanar model with low initial eccentricities for Ariel and Umbriel as in Tittemore & Wisdom (1988), we assume a circular model with low inclinations using a similar approach to Tittemore & Wisdom (1989) for the study of the 3/1 MMR between Miranda and Umbriel. In Sect. 2, we introduce a secular resonant two-satellite circular model with low inclinations using complex Cartesian coordinates and describe all dynamical features present in the two degree-of-freedom phase space for different ratios of the semi-major axes. In Sect. 3, we add tidal effects to the equations of motion using a constant time-lag model and then compute the capture probabilities in the 5/3 MMR for different initial inclination values. In Sect. 4, we perform a large number of numerical simulations to estimate the possible outcomes of the passage through the 5/3 MMR as a function of the initial inclinations. Finally, in the last section, we summarise and discuss our results.
2 Resonant secular dynamics
In this section we study the conservative dynamics of a three-body system involved in a second order (p + q)/p MMR, hence q = 2. For the 5/3 MMR, we additionally have p = 3, but our model is valid for any p value. We further assume that the orbits are circular (zero eccentricities) and have low inclinations.
2.1 Hamiltonian
We consider an oblate central body of mass m0 (Uranus) surrounded by two point-mass bodies m1, m2 ≪ m0 (satellites), where the subscript 1 refers to the inner orbit (Ariel) and the subscript 2 refers to the outer orbit (Umbriel). The potential energy of the system is given by (e.g. Smart 1953)
![$U = - \sum\limits_{k = 1}^2 {{{G{m_0}{m_k}} \over {{r_k}}}\left[ {1 + {J_2}{{\left( {{R \over {{r_k}}}} \right)}^2}{P_2}\left( {{{{\bf{\hat r}}}_k} \cdot {\bf{s}}} \right)} \right] - {{G{m_1}{m_2}} \over {\left| {{{\bf{r}}_2} - {{\bf{r}}_1}} \right|}},} $](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq1.png) (1)
(1)
where 𝒢 is the gravitational constant; J2, R, and s are the second order gravity field, the radius, and the spin unit vector of the central body, respectively; rk is the position vector of mk with respect to the centre of mass of m0 (planetocentric coordinates); rk = |rk| is the norm; řk = rk/rk is the unit vector; and P2(x) = (3x2 − 1)/2 is the Legendre polynomial of degree two. We neglected terms in (R/rk)3 (quadrupolar approximation for the oblateness). The Hamiltonian of the problem, ℋ, was then obtained by adding the orbital and rotational kinetic energies to Eq. (1).
2.1.1 Expansion in elliptical elements
We can expand the Hamiltonian in elliptical elements. To the first order in the mass ratios, mk/m0, zeroth order in the eccentricities, and second order in the inclinations, Ik (with respect to the equatorial plane of the central body), we have (e.g. Murray & Dermott 1999)
 (2)
(2)
is the Keplerian part and ak are the semi-major axes,
 (4)
(4)
is the contribution from the oblateness of the central body, λk are the mean longitudes, Ωk are the longitudes of the nodes,
![$\matrix{ {{H_S} = - {{G{m_1}{m_2}} \over {8{a_2}}}\left[ {4b_{{1 \over 2}}^{\left( 0 \right)}\left( \alpha \right) - \alpha b_{{3 \over 2}}^{\left( 1 \right)}\left( \alpha \right)\left( {I_1^2 + I_2^2} \right.} \right.} \hfill \cr {\left. {\quad \quad - 2{I_1}{I_2}\cos \left( {{{\rm{\Omega }}_2} - {\Omega _1}} \right)} \right]} \hfill \cr } $](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq5.png) (5)
(5)
is the secular part,  are Laplace coefficients, α = a1 /a2, and
are Laplace coefficients, α = a1 /a2, and
![$\matrix{ {{H_R} = - {{G{m_1}{m_2}} \over {8{a_2}}}\left[ {I_1^2\cos \left( {\left( {p + 2} \right){\lambda _2} - p{\lambda _1} - 2{{\rm{\Omega }}_1}} \right)} \right.} \hfill \cr {\quad \quad \,\, - 2{I_1}{I_2}\cos \left( {\left( {p + 2} \right){\lambda _2} - p{\lambda _1} - {{\rm{\Omega }}_2} - {{\rm{\Omega }}_1}} \right)} \hfill \cr {\quad \quad \,\, + I_2^2\cos \left. {\left( {\left( {p + 2} \right){\lambda _2} - p{\lambda _1} - 2{{\rm{\Omega }}_2}} \right)} \right]\alpha b_{{3 \over 2}}^{\left( {p + 1} \right)}\left( \alpha \right)} \hfill \cr } $](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq7.png) (6)
(6)
is the contribution from the second order resonant terms (q = 2). The ℋS and ℋR terms arise solely from the direct part of the disturbing function (last term in Eq. (1)), because in the circular approximation the indirect part does not have secular or second order resonant terms. The term in ℋF corresponds to the remaining terms of the disturbing function that depend on other combinations of the angles λ1, λ2, Ω1, and Ω2 that do not appear in the expressions of ℋS or ℋR.
Finally, for the last term in the Hamiltonian (Eq. (2)), corresponding to the rotational kinetic energy, C is the principal moment of inertia of the central body and
 (7)
(7)
which corresponds to the rotational angular momentum, ω = θ is the angular velocity, and θ is the rotation angle. In the conservative case, the rotational kinetic energy is constant and could be dropped from the Hamiltonian. Nevertheless, when we include tidal dissipation (Sect. 3), there are angular momentum exchanges between the spin and the orbits, and this term cannot be neglected.
2.1.2 Action-angle resonant variables
We can rewrite the Hamiltonian (2) using a set of canonical action-angle variables. For that purpose, we adopted Andoyer variables for the rotation (Θ, θ) and Poincaré variables for the orbits (Λk, λk; Φk, −Ωk) with
 (8)
(8)
 (9)
(9)
whereßk = m0mk/(m0 + mk) and µk = 𝒢(m0 + mk). Since we aim to study the dynamics of the system near the (p + 2)/p MMR, we introduce the near resonant angle
 (10)
(10)
which is present in all terms of the resonant Hamiltonian (Eq. (6)). Each term corresponds to a resonant combination:
 (11)
(11)
We further introduce the angles
 (12)
(12)
![$\left[ {\matrix{ \sigma \cr \gamma \cr {{\varphi _1}} \cr {{\varphi _1}} \cr \vartheta \cr } } \right] \equiv S\left[ {\matrix{ {{\lambda _1}} \cr {{\lambda _2}} \cr { - {{\rm{\Omega }}_1}} \cr { - {{\rm{\Omega }}_2}} \cr \theta \cr } } \right],$](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq14.png)
![$S = \,\left[ {\matrix{ { - {p \mathord{\left/ {\vphantom {p 2}} \right. \kern-\nulldelimiterspace} 2}} & {1 + {p \mathord{\left/ {\vphantom {p 2}} \right. \kern-\nulldelimiterspace} 2}} & 0 & 0 & 0 \cr {{p \mathord{\left/ {\vphantom {p 2}} \right. \kern-\nulldelimiterspace} 2}} & { - {p \mathord{\left/ {\vphantom {p 2}} \right. \kern-\nulldelimiterspace} 2}} & 0 & 0 & 0 \cr { - {p \mathord{\left/ {\vphantom {p 2}} \right. \kern-\nulldelimiterspace} 2}} & {1 + {p \mathord{\left/ {\vphantom {p 2}} \right. \kern-\nulldelimiterspace} 2}} & 1 & 0 & 0 \cr { - {p \mathord{\left/ {\vphantom {p 2}} \right. \kern-\nulldelimiterspace} 2}} & {1 + {p \mathord{\left/ {\vphantom {p 2}} \right. \kern-\nulldelimiterspace} 2}} & 0 & 1 & 0 \cr {{p \mathord{\left/ {\vphantom {p 2}} \right. \kern-\nulldelimiterspace} 2}} & { - 1 - {p \mathord{\left/ {\vphantom {p 2}} \right. \kern-\nulldelimiterspace} 2}} & 0 & 0 & 1 \cr } } \right],$](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq15.png)
which gives for the conjugated actions (e.g., Goldstein 1950)
![$\left[ {\matrix{ \sum \cr {\rm{\Gamma }} \cr {{{{\rm{\tilde \Phi }}}_1}} \cr {{{{\rm{\tilde \Phi }}}_2}} \cr {\tilde \Theta } \cr } } \right] = {\left( {{S^{ - 1}}} \right)^T}\,\left[ {\matrix{ {{{\rm{\Lambda }}_1}} \cr {{{\rm{\Lambda }}_2}} \cr {{{\rm{\Phi }}_1}} \cr {{{\rm{\Phi }}_2}} \cr \Theta \cr } } \right].$](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq16.png) (15)
(15)
The new set of canonical variables that uses the resonant angles is then given by
 (16)
(16)
2.1.3 Conserved quantities and average
We can rewrite the Hamiltonian (2) using the resonant canonical variables (Eq. (16)). For the actions, we can replace the semi-major axes and the inclinations using relations (8) and (9)
 (17)
(17)
 (18)
(18)
It is important to note, however, that the Λk are no longer actions of the resonant variables, and they must be obtained as (Eq. (16))
 (19)
(19)
 (20)
(20)


In the approximation of low inclinations, Φk ≪ Λk (Eq. (18)), and so we also have Φk ≪ Γk, allowing us to write
![${\rm{\Lambda }}_1^\alpha \approx {\rm{\Gamma }}_1^\alpha \left[ {1 - \alpha {p \over 2}{{{{\rm{\Phi }}_1} + {{\rm{\Phi }}_2}} \over {{{\rm{\Gamma }}_1}}}} \right],$](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq25.png) (24)
(24)
![${\rm{\Lambda }}_2^\alpha \approx {\rm{\Gamma }}_2^\alpha \left[ {1 - \alpha \left( {1 + {p \over 2}} \right){{{{\rm{\Phi }}_1} + {{\rm{\Phi }}_2}} \over {{{\rm{\Gamma }}_2}}}} \right],$](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq26.png) (25)
(25)
The angle θ does not appear in the expression of the Hamil-tonian (Eq. (2)), and so ϑ does not appear either (Eq. (16)). As a consequence, the conjugated action, Θ, is a constant of motion. According to the d’Alembert rule (conservation of the angular momentum), the remaining angles must be combined as
 (27)
(27)
where k1 + k2 + k3 + k4 = 0, or, using the resonant angles (Eq. (16)),
 (28)
(28)
Thus, the angle σ also does not appear in the Hamiltonian, and its conjugated action, Σ, is a constant of motion. We note that,
 (29)
(29)
does indeed correspond to the projection of the total angular momentum of the system along the direction of s, which must be conserved.
Near the MMR, the two resonant angles φ1 and φ2 present a slower variation than the angle γ, that is, . Therefore, we can construct the resonant secular normal form of the Hamiltonian (to the first order in mk/m0) by averaging over γ:
. Therefore, we can construct the resonant secular normal form of the Hamiltonian (to the first order in mk/m0) by averaging over γ:
 (30)
(30)
As a result, 〈ℋF〉γ = 0, and since γ no longer appears in the expression of the averaged Hamiltonian, the conjugated variable, Γ (Eq. (16)), also becomes a constant of motion. We thus reduced a problem with five degrees of freedom initially to a problem with only two degrees of freedom, (Φ1, φ1) and (Φ2, φ2), and three parameters, Σ, Γ, and Θ. The auxiliary quantities Γ1 (Eq. (21)) and Γ2 (Eq. (22)) are also constant.
The resonant secular Hamiltonian then finally reads as follows:
 (31)
(31)
where K stands for the Keplerian coefficients (Eq. (3)), O for the oblateness coefficients (Eq. (4)), S for secular the coefficients (Eq. (5)), and R for the resonant coefficients (Eq. (6)). The Keplerian part needs to be expanded to the second order in Φk (fourth order in the inclinations), because Kb is much larger than the remaining coefficients. The explicit expression of all these coefficients is given in Appendix A.
Present physical and orbital properties of the Uranian system (Thomas 1988; Jacobson 2014).
2.1.4 Complex rectangular coordinates
The equations of motion expressed in the variables (Φk, φk) may experience some singularities when Φk = 0 (because of the terms in 𝒮d and Rc). To remove this problem, we can perform a second canonical change of variables to rectangular coordinates (Φk, φk) → (yk, iȲk), where
 (32)
(32)
and Ȳk is the complex conjugate of yk. From Eq. (26), we have
 (33)
(33)
and so these variables are proportional to the inclinations. The resonant secular Hamiltonian (Eq. (31)) now reads as follows:
 (34)
(34)
The conservative equations of motion are simply obtained as
 (35)
(35)
![$\matrix{ {{{\dot y}_1} = {\rm{i}}\left[ {\left( {{{\cal K}_a} + {{\cal S}_a}} \right){y_1} + 2{{\cal K}_b}\left( {{y_1}{{\bar y}_1} + {y_2}{{\bar y}_2}} \right){y_1}} \right.} \cr {\left. {\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\, + \left( {{{\cal O}_a} + {{\cal S}_b}} \right){y_1} + {{{{\cal S}_d}} \over 2}{y_2} + {{\cal R}_a}{{\bar y}_1} + {{{{\cal R}_c}} \over 2}{{\bar y}_2}} \right]} \cr } $](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq38.png)
![$\matrix{ {{{\dot y}_2} = {\rm{i}}\left[ {\left( {{{\cal K}_a} + {{\cal S}_a}} \right){y_2} + 2{{\cal K}_b}\left( {{y_1}{{\bar y}_1} + {y_2}{{\bar y}_2}} \right){y_2}} \right.} \cr {\left. {\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\, + \left( {{{\cal O}_b} + {{\cal S}_c}} \right){y_2} + {{{{\cal S}_d}} \over 2}{y_1} + {{\cal R}_a}{{\bar y}_2} + {{{{\cal R}_c}} \over 2}{{\bar y}_1}} \right].} \cr } $](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq39.png)
2.2 Dynamical evolution
The values of mk, J2, and R are relatively well determined for the Uranian system (Table 1). Therefore, to compute the coefficients K, O, S, and R appearing in the Hamiltonian (34), we only need to know the values of the parameters Γ1 and Γ2 (see Appendix A), which in turn depend on the parameters Γ and Δ (Eqs.(21) and (22)).
If we neglect the O coefficients (oblateness coefficients), it is possible to eliminate the dependence in Γ, because we get  (see Appendix A and Delisle et al. 2012, Sect. 2.1.4). Although here we cannot use this simplification, the conservative dynamics is still not very sensitive to the Γ parameter (e.g. Tittemore & Wisdom 1988, 1989), and so we fixed it at the reference value1
(see Appendix A and Delisle et al. 2012, Sect. 2.1.4). Although here we cannot use this simplification, the conservative dynamics is still not very sensitive to the Γ parameter (e.g. Tittemore & Wisdom 1988, 1989), and so we fixed it at the reference value1
 (38)
(38)
The dynamics of the 5/3 MMR essentially depends on the Δ parameter (Eq. (23)), which measures the proximity to the resonance. Following Delisle et al. (2012), we write
 (39)
(39)
where Δr is the value of Δ at the planar (Ik = 0) nominal resonance, that is (Eq. (23) and (29)),
 (40)
(40)
when n1/n2 = 5/3, where nk is the mean motion of the satellite with mass mk. At the nominal resonance, using Kepler’s third law, we have the following relation for the Λk,r:
 (41)
(41)
From the expression of Γr (Eq. (16)), we additionally have
 (42)
(42)
which can be combined with expression (41) to give
 (43)
(43)
 (44)
(44)
and finally (Eq. (40))
 (45)
(45)
2.2.1 Equilibrium points
The equilibrium points correspond to stationary solutions of the Hamiltonian. They can be found by solving
 (46)
(46)
that is, finding the roots of Eqs. (36) and (37). Splitting these equations into their real and imaginary parts, yk = yk,r + iyk,i, we get
 (47)
(47)
 (48)
(48)
 (49)
(49)
 (50)
(50)
Replacing expressions (48) and (50) into expressions (47) and (49), respectively, yields that equilibria arise for
 (51)
(51)
A more deep analysis shows that stable equilibria can only occur when the real roots are null. We then focussed on these roots to determine the exact position of the stable equilibria. Since y1,r = y2,r = 0, we have (Eq. (32))
 (52)
(52)
which we replaced in expressions (49) and (50) to determine the possible values of Φ1 and Φ2,
 (53)
(53)

The equilibrium point at Φ1 = Φ2 = 0 is always present, although it can be stable or unstable. The remaining equilibria only exist for some δ values. In Fig. 1, we show the evolution of the equilibrium points as a function of δ. We rescaled the yk,i by  , such that we can translate the different equilibria in terms of inclinations (Eq. (33)).
, such that we can translate the different equilibria in terms of inclinations (Eq. (33)).
For positive δ values far from zero, there is only one equilibrium point at Ik = 0, which is stable (in blue). For δ = 2.068 × 10−6, there is a first bifurcation in the equilibria: two new stable equilibrium points appear at non-zero inclination (in green), while the point at Ik = 0 becomes unstable. For δ = −2.540 × 10−7, which is very close to the resonance nominal value δ = 0 (Eq. (40)), a second bifurcation arises: two additional unstable equilibrium points appear at a non-zero inclination (in red), while the point at Ik = 0 becomes stable again.
2.2.2 Energy levels
For a better understanding of the dynamics, we can look at the energy levels of the resonant secular Hamiltonian (34) for different values of δ (Eq. (45)). Since our problem has two degrees of freedom, and thus four dimensions, we need to plot these levels on section planes. We chose the plane (y1,i, y2,i) with y1,r = y2,r = 0, in order for stable equilibria to become visible (Eq. (52)). In Fig. 2, we show the energy levels for three values of δ, which are representative of the three different equilibrium possibilities appearing in Fig. 1. Again, we rescaled yk,i· by  , and so we actually show the energy levels in the plane (I1 sin φ1, ƒ2 sin φ2) with cos φ1 = cos φ2 = 0.
, and so we actually show the energy levels in the plane (I1 sin φ1, ƒ2 sin φ2) with cos φ1 = cos φ2 = 0.
For δ = 5 × 10−6 > 0 (Fig. 2a), there is a single equilibrium point (y1,i· = 0, y2,i = 0) at the centre (in blue). It corresponds to a fixed point of the Hamiltonian (34), which is surrounded by a circulating region. Therefore, in this case (and for higher δ values), all trajectories are outside the 5/3 MMR.
For δ = 0 (Fig. 2b), the system is at the nominal resonance (Eq. (39)). In this case, the equilibrium point at the centre (y1,i = 0, y2,i = 0) is still present (in red), but it is now unstable. Indeed, there is a separatrix in a tilted ‘8’ shape emerging from this point that surrounds two additional stable equilibrium points (in green). Trajectories inside the separatrix that encircle the stable points are in libration and correspond to orbits inside the 5/3 MMR. Trajectories outside the separatrix are in circulation.
Finally, for δ = −2 × 10−6 < 0 (Fig. 2c), several equilibria exist. There are two hyperbolic points (in red) from which a separatrix with two ‘banana’ shapes emerges. This separatrix delimits the phase space in libration and circulation regions. There are two stable points (in green), one inside each banana island. Trajectories that move around these points are in libration and correspond to orbits inside the 5/3 MMR. The point (y1,i = 0, y2,i = 0) at the centre (in blue) is again stable and inside a small circulation region. Trajectories outside the separatrix are also in circulation. This kind of phase space persists for smaller δ values, but the central circulation region becomes larger, while the resonant islands become thinner.
 |
Fig. 1 Evolution of the equilibrium points as a function of δ. The green lines represent stable points inside the resonance (in a libration region), the red lines represent hyperbolic points (unstable), and the blue lines represent stable fixed points (in a circulation region). |
2.2.3 Surface sections
The energy levels from previous the section allowed us to identify the different regions of the phase space, but a priori they do not correspond to trajectories followed by the system. Indeed, since our problem has four dimensions, they show the trajectories when they cross the section plane with y1,r = y2,r = 0, which only remain constant for the equilibrium points. An alternative projection consists of fixing only y1,r = 0 (or y2,r = 0) together with a constant energy, that is, to draw Poincaré surface sections. This projection is less restrictive, and therefore allows us to distinguish between periodic (fixed points), quasi-periodic (closed curves), and chaotic trajectories. For that purpose, we used the modified Hénon method (Henon & Heiles 1964; Palaniyandi 2009).
In Fig. 2, we observe that the more diverse dynamics occurs for δ = −2 × 10−6. We thus adopted this value to draw the surface sections. Since the Hamiltonian (34) is a four-degree function of yk, the intersection of the constant energy manifold by a plane may have up to four roots (families). Each family corresponds to a different dynamical behaviour, and so we must plot one of them at a time. However, the families are symmetric and actually we only need to show two of them. We chose to represent the families with the positive roots (that we dub 1 and 2).
In Fig. 3, we show a set of surface sections for the motion of Ariel in the plane (y1,i,y1,r) with y2,r = 0. We rescaled yk again by  , and so we actually show the surface sections in the plane (I1 sin φ1, I1 cos φ1) with cos φ2 = 0. Each panel corresponds to a different energy value, which coincide with the energy levels that are shown in Fig. 2c (we adopted the same colour code). The lowest energies occur in the circulation regions,
, and so we actually show the surface sections in the plane (I1 sin φ1, I1 cos φ1) with cos φ2 = 0. Each panel corresponds to a different energy value, which coincide with the energy levels that are shown in Fig. 2c (we adopted the same colour code). The lowest energies occur in the circulation regions,  , the separatrix corresponds to a transition level,
, the separatrix corresponds to a transition level,  , while the largest energies occur in the libration region,
, while the largest energies occur in the libration region,  . The inner circulation region is delimited by the levels
. The inner circulation region is delimited by the levels  , where
, where  corresponds to the energy of the equilibrium point with y1 = y2 = 0 (blue point in Fig. 2c). For this energy range, there are four families, while for the remaining energies only two families exist.
corresponds to the energy of the equilibrium point with y1 = y2 = 0 (blue point in Fig. 2c). For this energy range, there are four families, while for the remaining energies only two families exist.
For  (Fig. 3a), only family 1 exists, and we observe that the system is always quasi-periodic, corresponding to trajectories in the outer circulation region. As the energy increases, two islands appear, corresponding to trajectories that are in the libration region (in resonance). Initially, the motion in these new regions is also quasi-periodic. However, as the energy approaches the threshold ℋ = 0 (Figs. 3b,c), some chaotic regions appear in the transition between the circulation and libration regions. For
(Fig. 3a), only family 1 exists, and we observe that the system is always quasi-periodic, corresponding to trajectories in the outer circulation region. As the energy increases, two islands appear, corresponding to trajectories that are in the libration region (in resonance). Initially, the motion in these new regions is also quasi-periodic. However, as the energy approaches the threshold ℋ = 0 (Figs. 3b,c), some chaotic regions appear in the transition between the circulation and libration regions. For  (family 1), the chaotic regions increase, while the resonant islands shrink (Figs. 3d,e), until they completely disappear for
(family 1), the chaotic regions increase, while the resonant islands shrink (Figs. 3d,e), until they completely disappear for  (Fig. 3f). For this specific energy range, we also needed to plot family 2. Close to
(Fig. 3f). For this specific energy range, we also needed to plot family 2. Close to  , we observe quasi-periodic motion in the inner circulation region, but, as we approach
, we observe quasi-periodic motion in the inner circulation region, but, as we approach  , this area is also completely replaced by a chaotic region (Figs. 3j−1). Finally, for
, this area is also completely replaced by a chaotic region (Figs. 3j−1). Finally, for  , we observe that the chaotic region progressively vanishes and it is replaced by quasi-periodic motion in the libration region (Figs. 3g–i). In this energy range, we only have family 1 and trajectories in the outer circulation region also do not exist. Moreover, there is also a forbidden region at the centre of each panel that grows with the energy value while the libration areas shrink.
, we observe that the chaotic region progressively vanishes and it is replaced by quasi-periodic motion in the libration region (Figs. 3g–i). In this energy range, we only have family 1 and trajectories in the outer circulation region also do not exist. Moreover, there is also a forbidden region at the centre of each panel that grows with the energy value while the libration areas shrink.
From the analysis of the surface sections, we conclude that the dynamics of the 5/3 MMR between Ariel and Umbriel is very rich and depends on the energy of the system. In fact, the energy depends on the value of the inclinations (Eq. (34)), given by the variables y1 and y2 (Eq. (33)). Therefore, the value of the inclinations of Ariel and Umbriel when the system encounters the resonance can trigger completely different behaviours. For  , the motion is quasi-periodic, either in circulation or libration. Near the separatrix,
, the motion is quasi-periodic, either in circulation or libration. Near the separatrix,  , the motion is mainly chaotic. Finally, for
, the motion is mainly chaotic. Finally, for  , the motion is again quasi-periodic, but only possible in libration with a small amplitude around the high inclination stable equilibrium points (Fig. 1).
, the motion is again quasi-periodic, but only possible in libration with a small amplitude around the high inclination stable equilibrium points (Fig. 1).
 |
Fig. 2 Energy level curves in the plane(I1 sin φ1,I2 sin φ2) with cos φ1 = cos φ2 = 0, for δ = 5 × 10−6 (top), δ = 0 (middle), and δ = −2 × 10−6 (bottom). Stable equilibria are coloured in green (resonance) and blue, while unstable equilibria are coloured in red, as well as the level curves that correspond to the separatrix. |
3 Tidal evolution
The resonant dynamics presented in the previous section is conservative and thus the average semi-major axes remain constant. However, the orbits of the Uranian satellites are expected to evolve because of tidal interactions. The tidal contributions to the orbital and spin evolution can be obtained by considering an additional tidal potential (e.g. Darwin 1880; Kaula 1964).
3.1 Tidal potential energy
Tides arise from differential and inelastic deformations of an extended body (e.g. Uranus) owing to the gravitational effect of a perturber (e.g. Ariel or Umbriel). The resulting distortion gives rise to a tidal bulge, which modifies the gravitational potential of the extended body. The dissipation of the mechanical energy of tides inside the body introduces a time delay, τ, between the initial perturbation and the maximal deformation. As the perturber interacts with the additional potential field, the amount of tidal potential energy is given by
 (57)
(57)
where k2 is the elastic second Love number for potential of the body, rk = rk (t) is the position of the pertuber at a time t, and  is its position when it exerts the perturbation. In this work we solely consider the deformations raised on Uranus by its satellites, since we assumed the satellites as point masses (Sect. 2). This choice is fully justified because for circular orbits and synchronous satellites the tides raised by the planet on its satellites can be neglected (e.g. Correia 2009).
is its position when it exerts the perturbation. In this work we solely consider the deformations raised on Uranus by its satellites, since we assumed the satellites as point masses (Sect. 2). This choice is fully justified because for circular orbits and synchronous satellites the tides raised by the planet on its satellites can be neglected (e.g. Correia 2009).
Although tidal effects do not preserve the mechanical energy, it is possible to extend the Hamiltonian formalism from Sect. 2 by considering the primed quantities,  , as parameters (Mignard 1979). The tidal Hamiltonian then reads (Eqs. (2) and (57)) as follows:
, as parameters (Mignard 1979). The tidal Hamiltonian then reads (Eqs. (2) and (57)) as follows:
 (58)
(58)
As in Sect. 2.1.1, we first expanded Uk in elliptical elements. To the first order in the mass ratios, zeroth order in the eccentricities, and second order in the inclinations, we have
![$\matrix{ {{U_k} = - {k_2}{{{\cal G}m_k^2{R^5}} \over {4a_k^3a\prime _k^3}}\left[ {1 + 3\cos \left( {2\theta - 2\theta \prime - 2{\lambda _k} + 2\lambda {\prime _k}} \right)} \right.} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, - {3 \over 2}I_k^2\left( {1 - \cos \left( {2{\lambda _k} - 2{{\rm{\Omega }}_k}} \right) + \cos \left( {2\theta - 2\theta \prime - 2{\lambda _k} + 2\lambda {\prime _k}} \right)} \right.} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\,\left. { - \cos \left( {2\theta - 2\theta \prime + 2\lambda {\prime _k} - 2{{\rm{\Omega }}_k}} \right)} \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, - {3 \over 2}I\prime _k^2\left( {1 - \cos \left( {2\lambda {\prime _k} - 2{\rm{\Omega }}{\prime _k}} \right) + \cos \left( {2\theta - 2\theta \prime - 2{\lambda _k} + 2\lambda {\prime _k}} \right)} \right.} \hfill \cr {\left. {\,\,\,\,\,\,\,\,\,\,\, - \cos \left( {2\theta - 2\theta \prime - 2{\lambda _k} + 2{\rm{\Omega }}{\prime _k}} \right)} \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, + 3{I_k}I{\prime _k}\left( {\cos \left( {\theta - \theta \prime - 2{\lambda _k} + 2\lambda {\prime _k} + {{\rm{\Omega }}_k} - {\rm{\Omega }}{\prime _k}} \right)} \right.} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, + \cos \left( {\theta - \theta \prime - {{\rm{\Omega }}_k} + {\rm{\Omega }}{\prime _k}} \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, - \cos \left( {\theta - \theta \prime - 2{\lambda _k} + {{\rm{\Omega }}_k} + {\rm{\Omega }}{\prime _k}} \right)} \hfill \cr {\left. {\,\,\,\,\,\,\,\,\,\,\, - \cos \left( {\theta - \theta \prime + 2\lambda {\prime _k} - {{\rm{\Omega }}_k} - {\rm{\Omega }}{\prime _k}} \right)} \right].} \hfill \cr } $](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq81.png) (59)
(59)
We first performed the canonical change of variables that uses the resonant angles (Eq. (16)), and then changed to the complex Cartesian coordinates (Eq. (32)), to get
![$\matrix{ {{U_k} = - {k_2}{{{\cal G}m_k^2{R^5}\beta _k^{12}\mu _k^6} \over {4{\rm{\Gamma }}_k^7{\rm{\Gamma }}\prime _k^7}}\left[ {{{\rm{\Gamma }}_k}{\rm{\Gamma }}{\prime _k} - 3{\rm{\Gamma }}{\prime _k}{{\bar y}_k}{y_k} - 3{{\rm{\Gamma }}_k}\bar y{\prime _k}y{\prime _k}} \right.} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, - 6{p_k}\left( {{\rm{\Gamma }}{\prime _k}{y_1}{{\bar y}_1} + {{\rm{\Gamma }}_k}y{\prime _1}\bar y{\prime _1} + {\rm{\Gamma }}{\prime _k}{y_2}{{\bar y}_2} + {{\rm{\Gamma }}_k}y{\prime _2}\bar y{\prime _2}} \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, + 3\left( {{{\rm{\Gamma }}_k}{\rm{\Gamma }}{\prime _k} - {\rm{\Gamma }}{\prime _k}{{\bar y}_k}{y_k} - {{\rm{\Gamma }}_k}\bar y{\prime _k}y{\prime _k}} \right.} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\,\left. { - 6{p_k}\left( {{\rm{\Gamma }}{\prime _k}{y_1}{{\bar y}_1} + {{\rm{\Gamma }}_k}y{\prime _1}\bar y{\prime _1} + {\rm{\Gamma }}{\prime _k}{y_2}{{\bar y}_2} + {{\rm{\Gamma }}_k}y{\prime _2}\bar y{\prime _2}} \right)} \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, \times \cos \left( {2\left( {\vartheta - \vartheta \prime - {q_k}\left( {\gamma - \gamma \prime } \right)} \right)} \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, + {3 \over 2}{{\rm{\Gamma }}_k}\left( {\bar y\prime _k^2 + y\prime _k^2} \right)\cos \left( {2{q_k}\gamma \prime } \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, + {3 \over 2}{\rm{\Gamma }}{\prime _k}\left( {\bar y_k^2 + y_k^2} \right)\cos \left( {2{q_k}\gamma } \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, + 3\sqrt {{{\rm{\Gamma }}_k}{\rm{\Gamma }}{\prime _k}} \left( {{{\bar y}_k}y{\prime _k} + \bar y{\prime _k}{y_k}} \right)\cos \left( {\vartheta - \vartheta \prime } \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, - 3\sqrt {{{\rm{\Gamma }}_k}{\rm{\Gamma }}{\prime _k}} \left( {{{\bar y}_k}\bar y{\prime _k} + {y_k}y{\prime _k}} \right)\cos \left( {\vartheta - \vartheta \prime + 2{q_k}\gamma \prime } \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, - 3\sqrt {{{\rm{\Gamma }}_k}{\rm{\Gamma }}{\prime _k}} \left( {{{\bar y}_k}\bar y{\prime _k} + {y_k}y{\prime _k}} \right)\cos \left( {\vartheta - \vartheta \prime + 2{q_k}\gamma } \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, + \sqrt {{{\rm{\Gamma }}_k}{\rm{\Gamma }}{\prime _k}} \left( {{{\bar y}_k}y{\prime _k} + \bar y{\prime _k}{y_k}} \right)\cos \left( {\vartheta - \vartheta \prime - 2{q_k}\left( {\gamma - \gamma \prime } \right)} \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, + {3 \over 2}{\rm{\Gamma }}{\prime _k}\left( {\bar y\prime _k^2 + y_k^2} \right)\cos \left( {2\left( {\vartheta - \vartheta \prime + {q_k}\gamma \prime } \right)} \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, + {3 \over 2}{{\rm{\Gamma }}_k}\left( {\bar y\prime _k^2 + y\prime _k^2} \right)\cos \left( {2\left( {\vartheta - \vartheta \prime - {q_k}\gamma } \right)} \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, - {3 \over 2}{\rm{i\Gamma }}{\prime _k}\left( {\bar y\prime _k^2 - y\prime _k^2} \right)\sin \left( {2{q_k}\gamma \prime } \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, - {3 \over 2}{\rm{i\Gamma }}{\prime _k}\left( {\bar y_k^2 - y\prime _k^2} \right)\sin \left( {2{q_k}\gamma } \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, + 3{\rm{i}}\sqrt {{{\rm{\Gamma }}_k}{\rm{\Gamma }}{\prime _k}} \left( {\bar y{\prime _k}{y_k} - {{\bar y}_k}y{\prime _k}} \right)\sin \left( {\vartheta - \vartheta \prime } \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, + 3{\rm{i}}\sqrt {{{\rm{\Gamma }}_k}{\rm{\Gamma }}{\prime _k}} \left( {{{\bar y}_k}\bar y{\prime _k} - {y_k}y{\prime _k}} \right)\sin \left( {\vartheta - \vartheta \prime - 2{q_k}\gamma \prime } \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, - 3{\rm{i}}\sqrt {{{\rm{\Gamma }}_k}{\rm{\Gamma }}{\prime _k}} \left( {{{\bar y}_k}\bar y{\prime _k} - {y_k}y{\prime _k}} \right)\sin \left( {\vartheta - \vartheta \prime - 2{q_k}\gamma } \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, - 3{\rm{i}}\sqrt {{{\rm{\Gamma }}_k}{\rm{\Gamma }}{\prime _k}} \left( {\bar y{\prime _k}{y_k} - {{\bar y}_k}y{\prime _k}} \right)\sin \left( {\vartheta - \vartheta \prime + 2{q_k}\left( {\gamma - \gamma \prime } \right)} \right)} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\, - {3 \over 2}{\rm{i\Gamma }}{\prime _k}\left( {\bar y_k^2 - y_k^2} \right)\sin \left( {2\left( {\vartheta - \vartheta \prime + {q_k}\gamma \prime } \right)} \right)} \hfill \cr {\left. {\,\,\,\,\,\,\,\,\,\,\, + {3 \over 2}{\rm{i}}{{\rm{\Gamma }}_k}\left( {\bar y\prime _k^2 - y\prime _k^2} \right)\sin \left( {2\left( {\vartheta - \vartheta \prime - {q_k}\gamma } \right)} \right)} \right],} \hfill \cr } $](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq82.png) (60)
(60)
with p1 = −p/2, p2 = 1 + p/2, q1 = 1 + 2/p, and q2 = 1.
We note that σ does not appear in the expression of Uk. Therefore, in the presence of tides the parameter Σ (Eq. (29)) remains conserved. The fast angle γ is still present in the expression of Uk, but at this stage we cannot perform an average as in Sect. 2.1.3 because γ′ is considered as a parameter that can later cancel with γ (see Eq. (64)).
 |
Fig. 3 Poincaré surfaces of section for Ariel in the plane (I1 sin φ1,I1 cos φ1) with cos φ2 = 0 and δ = −2 × 10−6. Each panel was obtained with a different energy value, corresponding to the energy levels shown in Fig. 2c (we adopted the same colour code), and ℋ0 = 1.06 × 10−19 M⊙ au2 yr−2. |
3.2 Secular equations of motion
The equations of motion are obtained from Eq. (58) using the Hamilton equations. The additional contributions from tides only derive from the tidal potential energy Uk, and are given by
 (61)
(61)
In principle, we should also write the equations for γ and  and
and ,
but these angles disappear from the equations of motion with some of the following simplifications, and so we do not need them to get a closed set for the secular evolution of the system.
,
but these angles disappear from the equations of motion with some of the following simplifications, and so we do not need them to get a closed set for the secular evolution of the system.
To handle the expression of the primed quantities, we need to use a tidal model. For simplicity, we adopt here the weak friction model (e.g. Singer 1968; Alexander 1973), which assumes a constant and small time delay, τ. This model is widely used and provides very simple expressions for the tidal interactions, because it can be made linear (e.g. Mignard 1979):
 (62)
(62)
It follows for the remaining primed quantities that
 (63)
(63)
 (64)
(64)
 (65)
(65)
We then substituted expressions (63) to (65) into the equations of motion (61) and averaged over the fast angle γ (as in Eq. (30)) to finally get the secular equations for the tidal evolution
 (67)
(67)
 (68)
(68)
![$\matrix{ {{\rm{\dot \Gamma = 3}}{{{D_1}} \over {{\rm{\Gamma }}_1^{13}}}\left( {1 + {2 \mathord{\left/ {\vphantom {2 p}} \right. \kern-\nulldelimiterspace} p}} \right)\left[ {\left( {{{\rm{\Gamma }}_1} + 6p\left( {{y_1}{{\bar y}_1} + {y_2}{{\bar y}_2}} \right) - {y_1}{{\bar y}_1}} \right)\omega } \right.} \hfill \cr {\left. {\quad - \left( {{{\rm{\Gamma }}_1} + 6p\left( {{y_1}{{\bar y}_1} + {y_2}{{\bar y}_2}} \right){{\bar n}_1}} \right)} \right]\tau } \hfill \cr {\quad + 3{{{D_2}} \over {{\rm{\Gamma }}_1^{13}}}\left[ {{{\rm{\Gamma }}_1} - 6\left( {p + 2} \right)\left( {{y_1}{{\bar y}_1} + {y_2}{{\bar y}_2}} \right)\left. { - {y_2}{{\bar y}_2}} \right)\omega } \right.} \hfill \cr {\quad - \left. {\left( {{{\rm{\Gamma }}_2} - 6\left( {p + 2} \right)\left( {{y_1}{{\bar y}_1} + {y_2}{{\bar y}_2}} \right)} \right){{\bar n}_2}} \right]\tau ,} \hfill \cr } $](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq93.png) (69)
(69)
![$\matrix{ {{\rm{\dot \Theta = 3}}{{{D_1}} \over {{\rm{\Gamma }}_1^{13}}}\left[ {\left( {{{\rm{\Gamma }}_1} + 6p\left( {{y_1}{{\bar y}_1} + {y_2}{{\bar y}_2}} \right) - {y_1}{{\bar y}_1}} \right)\omega } \right.} \hfill \cr {\left. {\quad - \left( {{{\rm{\Gamma }}_1} + 6p\left( {{y_1}{{\bar y}_1} + {y_2}{{\bar y}_2}} \right) - {y_2}{{\bar y}_2}} \right){{\bar n}_1}} \right]\tau } \hfill \cr {\quad - 3{{{D_2}} \over {{\rm{\Gamma }}_1^{13}}}\left[ {{{\rm{\Gamma }}_2} - 6\left( {p + 2} \right)\left( {{y_1}{{\bar y}_1} + {y_2}{{\bar y}_2}} \right)\left. { - {y_2}{{\bar y}_2}} \right)\omega } \right.} \hfill \cr {\quad - \left. {\left( {{{\rm{\Gamma }}_2} - 6\left( {p + 2} \right)\left( {{y_1}{{\bar y}_1} + {y_2}{{\bar y}_2}} \right) - {y_2}{{\bar y}_2}} \right){{\bar n}_2}} \right]\tau ,} \hfill \cr } $](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq94.png) (70)
(70)

We note that in the expressions of y1 (Eq. (67)) and y2 (Eq. 68)), we have a conservative contribution (imaginary terms) and a dissipative contribution (real terms in τ). The conservative contributions result from a permanent tidal deformation and only slightly modify the fundamental frequencies of the system, while the dissipative contributions modify the secular evolution.
3.3 Tidal constraints
Tidal dissipation induces variations in the parameters Γ (Eq. (69)) and Θ (Eq. (70)). Then, the coefficients 𝒦, O, 𝒮, and ℛ appearing in the Hamiltonian (34) slowly change in time (Eqs. (21)–(23)), modifying the phase space (Fig. 2), which translates into a secular evolution of the system. We note that for the oblateness coefficients (Eqs. (A.3) and (A.4)), changes are observed not only due to Γ, but also in J2, according to (e.g. Correia & Rodríguez 2013)
 (72)
(72)
where ω = Θ/C (Eq. (7)) and kf is the fluid second Love number for potential. Using the present rotation rate and J2 of Uranus (Table 1), we obtained kf = 0.356.
3.3.1 Orbital evolution
For a better understanding of the tidal evolution of the satellites’ orbits, we can compute the secular evolution of the semi-major axes and inclinations from Eqs. (17) and (18) as
 (73)
(73)
 (74)
(74)
Both Ariel and Umbriel have very low inclinations (Table 1). Combined with the fast rotation rate of Uranus (ω/nk ≫ 1), we conclude that tides induce an outward migration of the satellites (Eq. (73)), and they damp their inclinations (Eq. (74)).
3.3.2 Resonance encounter
We can extrapolate the past evolution of the semi-major axes and determine when the 5/3 MMR encounter may have occurred (Eq. (73)). Neglecting the effect of the inclination and assuming a constant rotation rate for Uranus (ω/nk ≈ cte), we get
 (76)
(76)
which can be integrated to obtain a2 as a function of a1. Starting with the present system (Table 1) and assuming that the satellites were not temporarily captured into resonance, we can move backwards until the ratio of the nominal resonance is achieved (Eq. (41))
 (77)
(77)
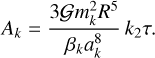
This allowed us to get the best estimate for the semi-major axes of Ariel and Umbriel at the exact 5/3 MMR (Fig. 4),
 (78)
(78)
and to compute other related parameters, such as Γ (Eq. (38)).
 |
Fig. 4 Tidal evolution of the semi-major axes of Ariel and Umbriel (Eq. (76)). The orange point marks the current observed values (Table 1). The dashed line gives the position of the nominal 5/3 MMR relation between a2 and a1 (Eq. (77)). The blue point gives the best estimation for the semi-major axes at the nominal resonance (Eq. (78)). |
3.3.3 Evolution timescale
The orbital evolution timescale depends on τ, which is related to the tidal dissipation (Eq. (62)). A more commonly used dimen-sionless quantity to measure the tidal dissipation is given by the quality factor (e.g. Correia & Valente 2022),
 (79)
(79)
As a result of studying the likelihood of resonance crossing in the Uranian system, Tittemore & Wisdom (1990) stated that the 2/1 MMR Ariel-Umbriel cannot be crossed, while the 3/1 MMR Miranda-Umbriel can be, and thus they constrained the interval of Q to be between 11000 and 39 000. Following the same approach, but using more recent measures for the satellites’ masses (Jacobson 2014), we find that Q = 8000 is a more suitable value. From Eq. (79), we then computed τ ≈ 0.62 s. In fact, the exact dissipation rate depends on the product k2τ (Eq. (75)). As in previous studies, in the present work we adopted k2 = 0.104 (Gavrilov & Zharkov 1977), which translates into
 (80)
(80)
Using Eq. (73), we estimate that the 5/3 MMR was crossed about 640 Myr ago. We can also estimate the damping timescale for the inclinations of both satellites (Eq. (74)). We get
 (81)
(81)
which yields about 180 Gyr and 1500 Gyr for Ariel and Umbriel, respectively. We hence conclude that the presently observed inclination values are likely unchanged since the system crossed the 5/3 MMR.
3.4 Capture probability
The behaviour of the system when it crosses the 5/3 MMR is not straightforward, since the problem has two degrees of freedom. As explained in Sect. 2.2.3, the different behaviours while crossing the resonance depend on the energy of the system, which corresponds to different inclinations. In order to get an idea of the critical inclinations that tend to trap the system in resonance or skip it, we can build a simplified one degree-of-freedom model.
The system can either be in resonance with the angle φ1 or φ2. Following Tittemore & Wisdom (1988), we retained only the terms associated with each angle and obtained their associated one degree-of-freedom simplified Hamiltonian (Eq. (34))
 (82)
(82)


In this simplified case, we could then directly apply the theory of the adiabatic invariant for resonance capture (Henrard 1982; Henrard & Lemaître 1983). In general, the phase space of a given resonance presents three different regions delimited by the separatrix (see for instance Fig. 2c): a libration region, with area  , and two circulation regions, one outside the libra-tion region and another encircled by the separatrix, with an area
, and two circulation regions, one outside the libra-tion region and another encircled by the separatrix, with an area  . Consider an initial trajectory with some energy ℋk < ℋ0. As the system evolves due to tides, the phase space and the areas of each region also change. When the trajectory encounters the resonance, depending on the exact place where the separatrix is crossed, the system can either evolve into the libration region (resonance) or into the inner circulation region. We can compute the capture probability analytically, provided that the evolution is adiabatic, that is, the tidal induced variations are much slower than the conservative inclination variations. The capture probability can then be obtained by the modification of the phase space with time, that is, by the change in the areas encircled by the separatrix (e.g. Yoder 1979; Henrard 1982):
. Consider an initial trajectory with some energy ℋk < ℋ0. As the system evolves due to tides, the phase space and the areas of each region also change. When the trajectory encounters the resonance, depending on the exact place where the separatrix is crossed, the system can either evolve into the libration region (resonance) or into the inner circulation region. We can compute the capture probability analytically, provided that the evolution is adiabatic, that is, the tidal induced variations are much slower than the conservative inclination variations. The capture probability can then be obtained by the modification of the phase space with time, that is, by the change in the areas encircled by the separatrix (e.g. Yoder 1979; Henrard 1982):
 (85)
(85)
The area of the resonance region is obtained by integrating over the separatrix,
 (86)
(86)
The energy of the separatrix (ℋ0) can be found by finding the hyperbolic points (see Sect. 2.2.1) and computing the Hamiltonian (82) at these points,
 (87)
(87)
Replacing ℋ0 into expression (82), we find, for the separatrix points, that
 (88)
(88)
There are two solutions, the + corresponding to the branch between the libration and the outer circulation region  , and the – corresponding to the branch between the libration and the inner circulation region
, and the – corresponding to the branch between the libration and the inner circulation region  . Therefore, we have
. Therefore, we have  and
and , which gives (Eq. (85))
, which gives (Eq. (85))
 (89)
(89)
and  , and
, and  , and
, and  . We note that since Γ is the only time-dependent quantity appearing in 𝒜k, ℬk, and 𝒞k (Appendix A),
. We note that since Γ is the only time-dependent quantity appearing in 𝒜k, ℬk, and 𝒞k (Appendix A),  (we neglected the small changes in Θ from the oblateness coefficients, Ok).
(we neglected the small changes in Θ from the oblateness coefficients, Ok).
In Fig. 5, we show the probability of capture in the ϕ1 and ϕ2 resonances obtained with expression (89). For some inclination values, we also show the results obtained with numerical integrations of the equations of motion derived from the simplified Hamiltonian (Eq. (82)) together with the secular tidal equations (Eqs. (67)–(70)). For each initial inclination, we ran 100 simulations where the initial angle ϕk was uniformly sampled. The amount of simulations captured in resonance at the end of the simulation are marked with a dot. The statistical fluctuation, represented as error bars, were estimated using binomial statistics, with the expression
 (92)
(92)
where N = 100 is the number of simulations (e.g. Tittemore & Wisdom 1988). We observe that there is a good agreement between the theoretical curve (Eq. (89)) and the output of the numerical simulations, that is, the adiabatic approximation holds.
In Fig. 5, we observe that for initial inclinations lower than 0.05°, the system is always captured in resonance. However, as we increase the initial inclination, the capture probability quickly decreases, it becomes ~50% for Ik = 0.1°, and drops to ~30% for Ik = 0.2°. These results suggest that a system with nearly coplanar orbits cannot escape the 5/3 MMR, but for inclinations higher than about 0.1°, it may be able to evade it.
We cannot completely rely on the conclusions obtained with the simplified Hamiltonian, mainly for two reasons. One is because the complete Hamiltonian (Eq. (34)) depends on the inclination of the other body. When we simplified the Hamiltonian (Eq. (82)) for y1, we dropped all terms in y2 (and vice versa), which is equivalent to setting y2 = 0. However, if we set y2 ≠ 0, more terms appear in the Hamiltonian, leading to a different distribution in the capture probabilities. The other reason is that the complete Hamiltonian has two degrees of freedom, and so for some combinations of the inclination values, the system can be chaotic (see Sect. 2.2.3). For the trajectories crossing the chaotic regions, the final outcome is unpredictable.
 |
Fig. 5 Capture probabilities in the φ1 (top) and φ2 (bottom) resonances. The solid line gives the theoretical approximation given by expression (89), while the dots give the results of numerical simulations. We ran 100 initial conditions with φ differing by 1.8°. |
4 Numerical simulations
We have seen that Ariel and Umbriel almost certainly encountered the 5/3 MMR at some time in the past. Depending on the inclination values of these satellites, the system may experience rather different behaviours. Near coplanar orbits are expected to become trapped in resonance, while some inclination can lead to alternative scenarios. In order to get a global view of the resonant dynamics with tides, in this section we integrate the complete set of differential Eqs. (36), (37), and (67)–(70).
4.1 Setup
When a resonance is crossed, we cannot perform a backward integration because we have a stochastic evolution. Therefore, we need to place the system slightly before the resonance encounter and then integrate it forwards. It is not possible to determine the exact semi-major axes prior to resonance crossing, but if the system does not spend much time in resonance, the semi-major axes should not differ much from the estimation given in Sect. 3.3.2. We still need to slightly decrease a1 (or increase a2) to move the system out of the nominal resonance (Eq. (78)). Since tides are stronger in Ariel, we opted to shift a1 and kept a2 constant:
 (93)
(93)
These values of the semi-major axes allowed us to compute the initial Γ parameter (Eq. (16)). For some given initial inclination values, we could also compute the initial value of Δ (Eq. (23)), which translates into an initial δ > 0 (Eq. (39)).
The physical properties of Uranus and its satellites can be found in Table 1. The total angular momentum is conserved and can also be obtained from the present system,
 (94)
(94)
The initial rotational rate, ω, was obtained from Σ using Eq. (29) with the pre-resonance semi-major axes (Eq. (93)). Finally, for the tidal dissipation, we adopted k2τ = 0.064 s (Eq. (80)).
 |
Fig. 6 Tidal evolution of the system as function of δ for initial inclinations I1 = I2 = 0.01°. The results of the numerical simulation (in black) are superimposed in the equilibria map (Fig. 1). We show the evolution for the resonant angle ϕ1 (top) and ϕ2 (bottom). |
4.2 Comparison with analytical estimations
In general, tidal effects are weak and only correspond to small perturbations of the conservative dynamics (adiabatic approximation). To verify that the numerical integrations do follow the theoretical predictions from Sects. 2 and 3, we initially ran a few simulations with the full equations of motion and then superimposed the output in the equilibria map as a function of δ (Fig. 1). Since ω > nk , tidal effects are expected to increase the value of Γ (Eq. (69)) and thus decrease the value of δ (Eq. (39)). Therefore, the results of the simulations as a function of time must be read from the right to the left in the figure.
In Fig. 6, we show the results of a first experiment with very small initial inclinations for both satellites, I1 = I2 = 0.01 °. Initially, when δ > 0, the system is in circulation with a small amplitude around the equilibrium point at zero (y1 = 0, y2 = 0). The system encounters the resonance when δ ≈ 0. However, just before δ = 0, two stable equilibrium points emerge (corresponding to the 5/3 MMR), and the equilibrium point at zero becomes unstable. The system is thus forced to follow one of the two resonance branches. As the system evolves and δ < 0, the equilibrium point at zero becomes stable again. However, because the amplitude of oscillation is small, the system closely follows the resonant branch, which corresponds to an increase in the inclinations. We thus confirm that for initially near coplanar orbits, the system cannot avoid capture in the 5/3 MMR (Sect. 3.4).
In Fig. 7, we show the results of a second experiment with higher initial inclinations for both satellites, I1 = I2 = 0.1°. The initial evolution for δ > 0 is similar to the case with lower initial inclinations (Fig. 6), except that the amplitude of oscillation is ten times larger in this case (corresponding to a system with a higher energy). As the system encounters the resonance at δ ≈ 0, it is not able to follow one of the resonant equilibria and it remains in a chaotic region around the separatrix (Fig. 3f). In the example on the left (Fig. 7a), after some time in the chaotic region with δ < 0, the system finds a way into the libration region and follows one of the resonant branches in a quasi-periodic orbit (Fig. 3i). On the other hand, in the example on the right (Fig. 7b), the system finds an alternative path back into the circulation region around the equilibrium point at zero in a quasi-periodic orbit (Fig. 3k). We thus confirm that for initial orbits with some inclination, the system experiences a chaotic regime for some time (Sect. 2.2.3), after which it can either be captured in the 5/3 MMR, or escape it with some probability (Sect. 3.4).
 |
Fig. 7 Two examples of tidal evolution of the system as a function of δ for initial inclinations I1 = I2 = 0. 1°. The results of the numerical simulation (in black) are superimposed in the equilibria map (Fig. 1). We show the evolution for the resonant angle ϕ1 (top) and ϕ2 (bottom). |
4.3 Impact of the initial inclination
The present mean inclinations of Ariel and Umbriel (Table 1) are likely unchanged after the system quits the 5/3 MMR (Eq. (81)). However, they may have been rather different before this encounter, as the inclinations undergo some excitations while crossing the resonance (Sect. 2). The fact that the system is not trapped in resonance at present, implies that the separatrix was crossed at some point and the inclinations had to experience some chaotic oscillations (Fig. 7b). Therefore, it is impossible to simply integrate backwards and determine the exact inclination values prior to the resonance encounter. To have a more clear idea of what the system may have been, we need to perform a statistical study of its past evolution, starting with arbitrary initial inclinations for both Ariel and Umbriel and then reject those that are not coherent with the present observations.
For that purpose, we explored a mesh of initial inclinations ranging between 0.001° and 0.2° with a stepsize of 0.05°. For each pair (I1 , I2), we ran 1000 simulations evenly sampled over the angle σ (Eq. (10)) for 100 Myr, in a total of 25 000 experiments. In Table 2, we list the complete set of initial conditions together with a summary of the outcome of the resonance crossing. The results of the simulations are presented in percentage because they can be seen as a statistical distribution of a given final evolution possibility. The total number of events of each kind can be simply obtained multiplying the percent by ten.
4.3.1 Capture probability
For each run, we first evaluated whether capture in resonance occurred or not. Capture takes place whenever at least one resonant angle, ϕk (Eq. (11)), switches from circulation to libration, and the mean motion ratio becomes approximately constant (n1/n2 ≈ 5/3). The mean motion ratio criterion is usually more useful to automatically detect captures because inside chaotic regions the behaviour of the resonant angles can be quite erratic. Conversely, capture does not occur when all resonant angles remain in circulation, which introduces only a small jump in the mean motion ratios. For this last case, we consider that the resonance is skipped. In Table 2, the relative number of these events is dubbed as Ps (skip probability).
The capture probability can be simply evaluated as 1 − Ps. However, when a capture occurs, we still have to distinguish between trajectories that remain captured for long periods of time from those that are able to escape shortly after. Indeed, in many resonant lockings, the inclinations remain chaotic and the system is able to evade the resonance after some time. In theory, all trajectories evading the resonance could lead to the present system. In practice, that is not possible, because the longer the system stays in resonance, the higher the final inclinations become (Fig. 6), and they cannot be conciliated with the presently observed values (Table 1). Moreover, Ćuk et al. (2020) have shown that as long as Ariel and Umbriel stay in resonance, the inclinations of the three other large satellites of Uranus also grow, in particular that of Miranda. After only 10 Myr in resonance, is it impossible to explain the observed values since tides are unable to efficiently damp the inclinations (Eq. (81)). Therefore, in our analysis, we split the capture events into those that stay in resonance for more than 10 Myr and those that are able to evade it before that time. In Table 2, the relative number of escapes is dubbed as Pe (escape probability) and the relative number of long-term entrapments is referred to as Pc (capture for more than 10 Myr probability).
In most sets of the simulations shown in Table 2, all three scenarios described above (capture, escape, and skip) are simultaneously present. To better illustrate the different possibilities, in Fig. 8, we show one example of each case, corresponding to set #17 (with an initial I1 = 0.05° and I2 = 0.15°).
In Fig. 8a, the system is permanently captured in resonance. Prior to the resonance encounter, the semi-major axes ratio follows the asymptotic evolution predicted by Eq. (73). When the system comes across the resonance (at t ≈ 11 Myr), the semi-major axes ratio becomes constant (since n1 /n2 ≈ 5/3), deviating considerably from the asymptotic line. Indeed, looking at Fig. 4, when capture occurs, instead of following the black curve, the system follows the dashed line, corresponding to the nominal resonance (Eq. (77)). Shortly after being captured, the system enters into the chaotic region. The inclinations of both satellites are excited and grow steadily on average, in particular that of Ariel, which oscillates between the two resonant branches (green lines in Fig. 1). For a time t ≈ 40 Myr, the system finds a way into the libration region and becomes quasi-periodic, as in the example shown in Fig. 7a.
In Fig. 8b, the system is temporarily captured in resonance for less than 10 Myr. As in the previous example, the semi-major axes ratio initially follows the asymptotic evolution predicted by Eq. (73), but it switches to a constant ratio as soon as capture in resonance occurs (at t ≈ 11 Myr). As before, during the resonant entrapment, the system enters into the chaotic region and the inclinations of both satellites start to grow. However, for a time around t ≈ 18 Myr (that is, just 7 Myr after being captured), the system finds a way outside the chaotic region that breaks the resonant locking and returns into the circulation region around the equilibrium point at zero (blue line in Fig. 1). From that point on, the semi-major axes ratio again follows the asymptotic evolution predicted by Eq. (73), though restarting with a slightly higher ratio, and the inclinations of both satellites stabilise around a given constant mean value. The final inclination of Ariel is always higher than its initial value because of the forcing during the resonant phase. The final inclination of Umbriel is less impacted by this mechanism and it does not have a systematic trend because it oscillates around the initial value with a large amplitude during the resonance crossing.
Finally, in Fig. 8c, the system shortly skips the resonance. As usual, the semi-major axes ratio initially follows the asymptotic evolution predicted by Eq. (73), and it undergoes some perturbations during the resonance crossing. However, it quickly returns to the asymptotic evolution, though restarting with a slightly lower ratio. In this case, there is almost no chaotic evolution for the inclinations because, just after crossing the separatrix, the system directly goes into the circulation region around the equilibrium point at zero (blue line in Fig. 1). The inclination of Ariel initially briefly grows since, owing to the topology of the 5/3 MMR (Fig. 2), it is not possible to reach the inner circulation region without moving around the resonant equilibrium for a short time (less than 1 Myr). Since in the example #17 the initial inclination of Ariel is indeed relatively small, for a short moment the inclination of Ariel follows the resonant branch and has to increase (green line in Fig. 1). Nevertheless, as soon as the equilibrium point at zero becomes stable, the system moves back into the circulation region and the inclination of Ariel drops. In the example shown in Fig. 8c, the inclination of Ariel decreases to a mean value smaller than the initial one, but actually in other examples it can be anything between zero and the maximum previously attained. The brief resonant excitation only involves the angle ϕ1 , and so it does not impact the inclination of Umbriel much. Its amplitude grows due to the mutual interactions with Ariel, but the mean value remains constant. However, as the resonance is skipped, the mean value of Umbriel inclination suddenly drops to a lower level. This reduction is always observed because the inner circulation region is confined within a region of low inclination for Umbriel, in particular for δ values very close to zero (Fig. 2c).
Figure 8c also provides an example of a simulation where the system crosses the 5/3 MMR and subsequently evolves into the presently observed configuration (orange dots, taken from Table 1). Not all simulations #17 that skip the resonance end in the present system, though a significant number is consistent with it. On the other hand, some simulations starting with different initial conditions (Table 2) can also evolve into the present state. Therefore, only a more refined analysis of the final distribution of the inclinations of both Ariel and Umbriel can provide more insight into the occurrence likelihood of the currently observed system.
Initial conditions and summary of the numerical simulations's results of the 5/3 MMR crossing.
 |
Fig. 8 Three examples of a system crossing the 5/3 MMR with initial I1 = 0.05° and I2 = 0.15º (set #17 in Table 2). We show the ratio between the semi-major axes (top), the inclination of Ariel (middle), and the inclination of Umbriel (bottom) as a function of time. Each column corresponds to a different simulation. We show an example of a system that is permanently caught in resonance (a), one that is captured but evades the resonance in less than 10 Myr (b), and another that skips the resonance without capture (c). The blue line gives the asymptotic evolution predicted by Eq. (73), while the dashed line gives the position of the nominal resonance Eq. (77). The orange dots mark the present mean inclinations (Table 1). |
4.3.2 Statistics
For the set of simulations #1 – #8 (Table 2), that is to say those with initial I2 ≤ 0.05°, the system is captured in resonance nearly in 100% of the cases. For the initial inclination of Umbriel, these results are thus in agreement with the predictions of the simplified model presented in Sect. 3.4. Since capture in the 5/3 MMR is not observed today, we can immediately exclude this range of initial conditions. We hence conclude that, regardless of the initial inclination of Ariel, the system requires some moderate initial inclination for Umbriel (I2 ≳ 0.1°) to evolve into the present state.
The resonance crossing is a stochastic process and therefore the same initial inclinations with a slightly different initial resonant angle may end up in a completely different final state. In all of the other sets of simulations that we performed (#9 – #25), the system can either remain captured for a long time, escape the resonance in less than 10 Myr, or simply skip it. In general, as we increase the initial inclinations of both satellites, the probability of capture in resonance decreases, in conformity with the analysis from Sect. 3.4. Interestingly, the number of trajectories temporarily captured for less than 10 Myr does not change much with the initial conditions, they occur around 20–25% of the time. This suggests that the chaotic diffusion, which characterises this transient regime, is not very sensitive to the initial inclinations. Finally, as a result of the previous two outcomes, as we increase the initial inclinations of both satellites, the number of simulations that simply skip the resonance also increases.
For those systems that skip or escape the 5/3 MMR, one can ask if the final inclinations are in agreement with the present observations. However, there is not an easy answer because of the chaotic diffusion. Indeed, the final inclinations of Ariel and Umbriel never end exactly with the same values, but they rather follow some kind of statistical distribution. Considering only the trajectories that quickly evade or skip the resonance (Pe and Ps), we can build a histogram to better understand how they are distributed for each set of simulations #9 - #25 (i.e. we only consider simulations with less than 95% of capture probability).
In Fig. 9, we show three examples of histograms for the sets #9 (I1 = 0.15°, I2 = 0.05°), #17 (I1 = 0.05°, I2 = 0.15°), and #19 (I1 = 0.15°, I2 = 0.15°). The final inclinations of Ariel and Umbriel are distributed in classes with a size of 0.015° and the number of events in each class is normalised by the total number of trajectories that quickly evaded or skipped the resonance. We observe that for Ariel, the final inclinations are more or less evenly distributed between 0.01° and 0.25°, while for Umbriel the final inclinations closely pile up around some mean value.
To better analyse the results in a systematic way, and since Ik ∝ |yk| (Eq. (33)), we fitted a Rice distribution to each data set (Rice 1945), which describes the modulus of a random walk variable in two dimensions. This function has the form
 (95)
(95)
where 〈I〉 is the mean inclination, ΔI is the standard deviation, and B0(x) is the modified Bessel function, given by
 (96)
(96)
In Fig. 9, for each histogram we also show the curve of the Rice distribution corresponding to the best fit parameters 〈I〉 and ΔI. We verified there is a reasonably good agreement between the histogram and the derived distribution, in particular for the final inclination of Umbriel. We hence adopted the best fit parameters obtained in this way to characterise each data set.
The statistical results obtained are listed in Table 2. From a detailed analysis, for the trajectories that are not trapped in resonance, we observe the following: for Ariel, regardless of the its initial inclination value, the final inclinations are always more or less uniformly distributed2 in the interval I1 є [0.01°, 0.25°]; and for Umbriel, the final inclinations are gathered around the mean value with a standard deviation ΔI2 ≈ 0.02°, and the mean value for the final inclination of Umbriel increases with the initial inclinations of both satellites. A more subtle analysis additionally shows that the average final inclination of Umbriel is always lower than its initial value and it also depends on the initial inclination of Ariel. It is approximately given by (see Fig. 10)
 (97)
(97)
that is, to say the lower the initial inclination of Ariel is, the larger the decrease observed in the initial inclination of Umbriel.
The present average inclinations of Ariel and Umbriel are I1 ≈ 0.02° and I2 ≈ 0.08°, respectively (Table 1). After crossing the 5/3 MMR, the inclination of Ariel is always approximately uniformly distributed and not very sensitive to the initial conditions. The presently observed value is thus compatible with near zero or moderate initial inclinations of both satellites (Ik < 0.2°), but no additional constraints can be derived. However, the final inclination of Umbriel strongly depends on the initial inclination of both satellites (Eq. (97)). We hence conclude that the best configuration that reproduces the present data was obtained for initial I1 ≈ 0.20° and I2 ≈ 0.10° (#15, Table 2) or initial I1 ≲ 0.05° and I2 ≈ 0.15° (#16 and #17, Table 2).
The satellites of Uranus were likely formed in a circumplan-etary disk (e.g. Pollack et al. 1991; Szulágyi et al. 2018; Ishizawa et al. 2019; Inderbitzi et al. 2020), and so the initial inclinations should have been extremely small. Therefore, initial inclinations of 0.15° or higher are very difficult to explain. However, Umbriel was most likely previously involved in a 3/1 MMR with Miranda (Tittemore & Wisdom 1989, 1990), which can excite the inclination of Umbriel to 0.15° prior to the encounter with the 5/3 MMR. We hence conclude that the most likely scenario for the initial inclinations of Ariel and Umbriel is I1 ≲ 0.05° and I2 ≈ 0.15° (#16 and #17, Table 2).
 |
Fig. 9 Histograms for the final distribution of the inclinations of Ariel (top) and Umbriel (bottom) for different sets of initial conditions. We also plotted the best fit Rice distribution (Eq. (95)) to each histogram (red curve) and the corresponding mean inclination, 〈I〉, and standard deviation, ∆I. We used the sets #9 (left), #17 (centre), and #19 (right) from Table 2. |
 |
Fig. 10 Variation in the average inclination of Umbriel after crossing the 5/3 MMR as a function of the initial inclination of Ariel. The points are taken from the simulations #11 to #25 in Table 2, and the line gives the adjustment of a linear regression. |
5 Conclusion
Ariel and Umbriel have almost certainly passed through the 5/3 MMR in the past owing to the tidal evolution of their orbits. However, the exact mechanism that allows the system to evade capture in this resonance is a mystery. For coplanar orbits (zero inclinations), the eccentricity of at least one satellite must be close to 0.01 at the time, which is unlikely because tides are expected to quickly damp the eccentricities to nearly zero (Tittemore & Wisdom 1988). For non-coplanar orbits, the inclinations appear to grow to high values, which is unlikely because tides are very inefficient to damp the inclinations to the presently observed near zero values (Ćuk et al. 2020).
To address this question, in this paper we revisited the 5/3 MMR crossing problem only focussing on the inclination. We adopted a secular resonant two-satellite circular model with low inclinations, using a Hamiltonian approach similar to Tittemore & Wisdom (1989) for the study of the 3/1 resonance between Miranda and Umbriel. However, in our model we included the spin evolution of Uranus, we used complex Cartesian coordinates, and we adopted the total angular momentum of the system as a canonical variable, which is conserved and naturally removes one degree of freedom from the problem. We thus only needed to perform one average over a fast angle, instead of the widely used average over two fast angles (e.g. Tittemore & Wisdom 1988, 1989; Michtchenko & Ferraz-Mello 2001; Alves et al. 2016). We also implemented a Hamiltonian extension for tides based on the constant time-lag model, which provides the exact tidal evolution for all variables in the problem.
Our model is valid for any second order MMR, and thus not restricted to the 5/3 MMR between Ariel and Umbriel. For instance, it can be directly applied to the passage through the 3/1 MMR between Miranda and Umbriel. More generally, it can also be used to study a large number of planetary systems near second order resonances (in the circular approximation), such as the 3/1 MMR for HD 60532 (Laskar & Correia 2009), the 5/3 MMR for HD 33844 (Wittenmyer et al. 2016), the 7/5 MMR for HD 41248 (Jenkins et al. 2013), or the 9/7 MMR for Kepler-29 (Vissapragada et al. 2020).
Applying our model to Ariel and Umbriel, we have shown that, prior to the 5/3 MMR encounter, the system is in circulation around an equilibrium point at the origin of the coordinates (y1 = 0,y2 = 0). As the system approaches the resonance, this equilibrium becomes unstable, while two other stable symmetrical equilibria appear, corresponding to libration in resonance. Shortly after, the equilibrium at zero becomes stable again, corresponding to a new circulation region (see Fig. 2). For initial very low inclination values (low energy), the system is thus forced to follow one of the resonant equilibria (capture). However, for moderate inclinations (higher energy), the system may encounter the resonance when all the stable equilibrium possibilities are already available and directly go to the circulation region (skip). Alternatively, the system enters into a chaotic regime and can subsequently evade into the circulation (escape) or the libration regions (capture). The chaotic nature of the system as a function of the energy is clearly portrayed in a sequence of Poincaré surface sections obtained with the modified Hénon method (Fig. 3).
The crossing of the 5/3 MMR is a stochastic process, and so we performed a large number of numerical simulations covering many different combinations for the initial inclinations of Ariel and Umbriel. The results show that the initial inclination of Umbriel must have been higher than about 0.1° to avoid a permanent capture. Moreover, in order to conciliate the output of the simulations with the presently observed system (Table 1), we find that the optimal inclinations for the satellites prior to the resonance encounter are I1 ≲ 0.05° for Ariel and I2 ≈ 0.15° for Umbriel. In this configuration, about 60% of the simulations avoid capture in resonance and the final inclination distribution of Umbriel clusters around the present mean value of 0.08°. The final inclination distribution of Ariel spreads between 0.01° and 0.25° with a nearly equal probability, which includes the present mean value of 0.02°. The inclination damping timescales of ~180 Gyr for Ariel and ~1500 Gyr for Umbriel additionally suggest that the inclination values obtained just after crossing the resonance have nearly remained unchanged up to the present.
The satellites of Uranus were presumably formed in a cir-cumplanetary disk, and so the primordial eccentricities and inclinations should have been extremely small. Before the encounter with the 5/3 MMR, the Uranian satellites may have crossed other MMRs (e.g. Peale 1988; Ćuk et al. 2020). In general, these resonances excite the eccentricities and the inclinations of the bodies involved in the commensurability. Tides are very efficient at damping the eccentricities, but not the inclinations. Therefore, while the remnant eccentricities are quickly eroded, the inclinations are fossilised until the next resonant encounter. For instance, the present high inclination of Miranda (~4.3°) is usually explained after a passage through the 3/1 MMR between Miranda and Umbriel that occurred several billion years ago. Interestingly, this resonance also involves Umbriel, whose inclination can therefore also be excited, though to a much lower value than that of Miranda (Tittemore & Wisdom 1989, 1990). As a consequence, prior to the encounter with the 5/3 MMR, it is reasonable to assume a near zero inclination for Ariel and an inclination around 0.15° for Umbriel.
The results obtained in this paper are very compelling, but they need to be taken with caution because our model is limited to circular orbits and two satellites. In a non-circular model, the eccentricity terms introduce other resonant angles that provide additional libration and chaotic regions to the problem (Tittemore & Wisdom 1988). Indeed, for the 3/1 MMR between Miranda and Umbriel, it was shown that the coupling between the eccentricity and inclination resonances may cause significant variations in the eccentricity evolution of Miranda (Tittemore & Wisdom 1990). Moreover, the presence of the remaining three large satellites or Uranus can also introduce three-body resonances that may further excite the eccentricities and the inclinations (Ćuk et al. 2020). Therefore, in order to fully understand how exactly the system evaded the 5/3 MMR between Ariel and Umbriel and subsequently settled into the present state, future work should take into account the effect of the eccentricities and from all five major satellites in the Uranian system.
Acknowledgements
This work was supported by grant SFRH/BD/143371/2019, and by projects CFisUC (UIDB/04564/2020 and UIDP/04564/2020), GRAVITY (PTDC/FIS-AST/7002/2020), PHOBOS (POCI-01-0145-FEDER-029932), and ENGAGE SKA (POCI-01-0145-FEDER-022217), funded by COMPETE 2020 and FCT, Portugal. We acknowledge the Laboratory for Advanced Computing at University of Coimbra (https://www.uc.pt/lca) for providing the resources to perform the numerical simulations.
Appendix A Conservative Hamiltonian coefficients
We note that
 (A.1)
(A.1)
 (A.2)
(A.2)
 (A.3)
(A.3)
 (A.4)
(A.4)
![$\matrix{ {{{\cal S}_a} = {{{\cal G}{\mu _2}{m_1}{m_2}\beta _2^2} \over {{\rm{\Gamma }}_2^3}}\left( {1 + {p \over 2} + } \right.} \hfill \cr {\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,{{{\mu _2}\beta _2^2} \over {{\mu _1}\beta _1^2}}\left[ {\left( {1 + {p \over 2}} \right){{{\rm{\Gamma }}_1^2} \over {{\rm{\Gamma }}_2^2}} + {p \over 2}{{{{\rm{\Gamma }}_1}} \over {{{\rm{\Gamma }}_2}}}} \right]\left. {{\partial \over {\partial \alpha }}} \right)\,b_{{1 \over 2}}^{\left( 0 \right)}\left( {{\alpha _0}} \right)} \hfill \cr } $](/articles/aa/full_html/2023/06/aa46101-23/aa46101-23-eq136.png) (A.5)
(A.5)
 (A.6)
(A.6)
 (A.7)
(A.7)
 (A.8)
(A.8)
 (A.9)
(A.9)
 (A.10)
(A.10)
 (A.11)
(A.11)
where α0 ≈ 0.7114 corresponds to α = a1/a2 at the nominal resonance (Eq. (77)).
References
- Alexander, M. E. 1973, Ap&SS, 23, 459 [NASA ADS] [CrossRef] [Google Scholar]
- Alves, A. J., Michtchenko, T. A., & Tadeu dos Santos, M. 2016, Celest. Mech. Dyn. Astron., 124, 311 [NASA ADS] [CrossRef] [Google Scholar]
- Cartwright, R. J., Beddingfield, C. B., Nordheim, T. A., et al. 2020, ApJ, 898, L22 [NASA ADS] [CrossRef] [Google Scholar]
- Correia, A. C. M. 2009, ApJ, 704, L1 [NASA ADS] [CrossRef] [Google Scholar]
- Correia, A. C. M., & Rodríguez, A. 2013, ApJ, 767, 128 [NASA ADS] [CrossRef] [Google Scholar]
- Correia, A. C. M., & Valente, E. F. S. 2022, Celest. Mech. Dyn. Astron., 134, 24 [NASA ADS] [CrossRef] [Google Scholar]
- Cuk, M., El Moutamid, M., & Tiscareno, M. S. 2020, Plan. Sci. J., 1, 22 [Google Scholar]
- Darwin, G. H. 1880, Philos. Trans. R. Soc. London, 171, 713 [NASA ADS] [CrossRef] [Google Scholar]
- Delisle, J.-B., Laskar, J., Correia, A. C. M., & Boué, G. 2012, A&A, 546, A71 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Dermott, S. F., & Nicholson, P. D. 1986, Nature, 319, 115 [NASA ADS] [CrossRef] [Google Scholar]
- Dermott, S. F., Malhotra, R., & Murray, C. D. 1988, Icarus, 76, 295 [NASA ADS] [CrossRef] [Google Scholar]
- Gavrilov, S. V., & Zharkov, V. N. 1977, Icarus, 32, 443 [NASA ADS] [CrossRef] [Google Scholar]
- Goldstein, H. 1950, Classical mechanics (Reading: Addison-Wesley) [Google Scholar]
- Henon, M., & Heiles, C. 1964, AJ, 69, 73 [NASA ADS] [CrossRef] [Google Scholar]
- Henrard, J. 1982, Celest. Mech., 27, 3 [Google Scholar]
- Henrard, J., & Lemaître, A. 1983, Celest. Mech., 30, 197 [NASA ADS] [CrossRef] [Google Scholar]
- Ida, S., Ueta, S., Sasaki, T., & Ishizawa, Y. 2020, Nat. Astron., 4, 880 [Google Scholar]
- Inderbitzi, C., Szulágyi, J., Cilibrasi, M., & Mayer, L. 2020, MNRAS, 499, 1023 [NASA ADS] [CrossRef] [Google Scholar]
- Ishizawa, Y., Sasaki, T., & Hosono, N. 2019, ApJ, 885, 132 [NASA ADS] [CrossRef] [Google Scholar]
- Jacobson, R. A. 2014, AJ, 148, 76 [NASA ADS] [CrossRef] [Google Scholar]
- Jenkins, J. S., Tuomi, M., Brasser, R., Ivanyuk, O., & Murgas, F. 2013, ApJ, 771, 41 [NASA ADS] [CrossRef] [Google Scholar]
- Kaula, W. M. 1964, Rev. Geophys., 2, 661 [Google Scholar]
- Laskar, J. 1986, A&A, 166, 349 [NASA ADS] [Google Scholar]
- Laskar, J., & Correia, A. C. M. 2009, A&A, 496, L5 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Malhotra, R., & Dermott, S. F. 1990, Icarus, 85, 444 [NASA ADS] [CrossRef] [Google Scholar]
- Michtchenko, T. A., & Ferraz-Mello, S. 2001, Icarus, 149, 357 [CrossRef] [Google Scholar]
- Mignard, F. 1979, Moon Planets, 20, 301 [Google Scholar]
- Murray, C. D., & Dermott, S. F. 1999, Solar System Dynamics (Cambridge, UK: Cambridge University Press) [Google Scholar]
- Palaniyandi, P. 2009, Chaos Solitons Fractals, 39, 1877 [NASA ADS] [CrossRef] [Google Scholar]
- Peale, S. J. 1988, Icarus, 74, 153 [NASA ADS] [CrossRef] [Google Scholar]
- Pollack, J. B., Lunine, J. I., & Tittemore, W. C. 1991, in Uranus, eds. J.T. Bergstralh, E.D. Miner, & M.S. Matthews (Tucson: University of Arizona Press), 469 [CrossRef] [Google Scholar]
- Rice, S. O. 1945, Bell Syst. Tech. J., 24, 46 [Google Scholar]
- Rufu, R., & Canup, R. M. 2022, ApJ, 928, 123 [NASA ADS] [CrossRef] [Google Scholar]
- Singer, S. F. 1968, Geophys. J. R. Astron. Soc., 15, 205 [Google Scholar]
- Smart, W. M. 1953, Celestial Mechanics (London, New York: Longmans, Green) [Google Scholar]
- Smith, B. A., Soderblom, L. A., Beebe, R., et al. 1986, Science, 233, 43 [NASA ADS] [CrossRef] [Google Scholar]
- Squyres, S. W., Reynolds, R. T., & Lissauer, J. J. 1985, Icarus, 61, 218 [NASA ADS] [CrossRef] [Google Scholar]
- Szulágyi, J., Cilibrasi, M., & Mayer, L. 2018, ApJ, 868, L13 [Google Scholar]
- Thomas, P. C. 1988, Icarus, 73, 427 [NASA ADS] [CrossRef] [Google Scholar]
- Tittemore, W. C. 1990, Icarus, 87, 110 [NASA ADS] [CrossRef] [Google Scholar]
- Tittemore, W. C., & Wisdom, J. 1988, Icarus, 74, 172 [NASA ADS] [CrossRef] [Google Scholar]
- Tittemore, W. C., & Wisdom, J. 1989, Icarus, 78, 63 [NASA ADS] [CrossRef] [Google Scholar]
- Tittemore, W. C., & Wisdom, J. 1990, Icarus, 85, 394 [NASA ADS] [CrossRef] [Google Scholar]
- Verheylewegen, E., Noyelles, B., & Lemaitre, A. 2013, MNRAS, 435, 1776 [CrossRef] [Google Scholar]
- Vissapragada, S., Jontof-Hutter, D., Shporer, A., et al. 2020, AJ, 159, 108 [NASA ADS] [CrossRef] [Google Scholar]
- Wittenmyer, R. A., Johnson, J. A., Butler, R. P., et al. 2016, ApJ, 818, 35 [NASA ADS] [CrossRef] [Google Scholar]
- Yoder, C. F. 1979, Celest. Mech., 19, 3 [NASA ADS] [CrossRef] [Google Scholar]
- Zahnle, K., Schenk, P., Levison, H., & Dones, L. 2003, Icarus, 163, 263 [NASA ADS] [CrossRef] [Google Scholar]
The value of Γ was obtained by reversing the orbital tidal evolution of the system (Eq. (73)) until the nominal resonance was achieved (Eq. (77)) and starting with the present semi-major axes (see Sect. 3.3.2).
We note that by construction, the Rice distribution must be zero when the inclination is zero and it has to peak around the mean value (Eq. (95)). As the final inclinations of Ariel are more or less uniformly distributed, a step function would provide a better adjustment. Nevertheless, we kept the Rice distribution for Ariel for simplicity since it is able to correctly capture the mean value and the dispersion around it.
All Tables
Present physical and orbital properties of the Uranian system (Thomas 1988; Jacobson 2014).
Initial conditions and summary of the numerical simulations's results of the 5/3 MMR crossing.
All Figures
|
Fig. 1 Evolution of the equilibrium points as a function of δ. The green lines represent stable points inside the resonance (in a libration region), the red lines represent hyperbolic points (unstable), and the blue lines represent stable fixed points (in a circulation region). |
| In the text | |
|
Fig. 2 Energy level curves in the plane(I1 sin φ1,I2 sin φ2) with cos φ1 = cos φ2 = 0, for δ = 5 × 10−6 (top), δ = 0 (middle), and δ = −2 × 10−6 (bottom). Stable equilibria are coloured in green (resonance) and blue, while unstable equilibria are coloured in red, as well as the level curves that correspond to the separatrix. |
| In the text | |
|
Fig. 3 Poincaré surfaces of section for Ariel in the plane (I1 sin φ1,I1 cos φ1) with cos φ2 = 0 and δ = −2 × 10−6. Each panel was obtained with a different energy value, corresponding to the energy levels shown in Fig. 2c (we adopted the same colour code), and ℋ0 = 1.06 × 10−19 M⊙ au2 yr−2. |
| In the text | |
|
Fig. 4 Tidal evolution of the semi-major axes of Ariel and Umbriel (Eq. (76)). The orange point marks the current observed values (Table 1). The dashed line gives the position of the nominal 5/3 MMR relation between a2 and a1 (Eq. (77)). The blue point gives the best estimation for the semi-major axes at the nominal resonance (Eq. (78)). |
| In the text | |
|
Fig. 5 Capture probabilities in the φ1 (top) and φ2 (bottom) resonances. The solid line gives the theoretical approximation given by expression (89), while the dots give the results of numerical simulations. We ran 100 initial conditions with φ differing by 1.8°. |
| In the text | |
|
Fig. 6 Tidal evolution of the system as function of δ for initial inclinations I1 = I2 = 0.01°. The results of the numerical simulation (in black) are superimposed in the equilibria map (Fig. 1). We show the evolution for the resonant angle ϕ1 (top) and ϕ2 (bottom). |
| In the text | |
|
Fig. 7 Two examples of tidal evolution of the system as a function of δ for initial inclinations I1 = I2 = 0. 1°. The results of the numerical simulation (in black) are superimposed in the equilibria map (Fig. 1). We show the evolution for the resonant angle ϕ1 (top) and ϕ2 (bottom). |
| In the text | |
|
Fig. 8 Three examples of a system crossing the 5/3 MMR with initial I1 = 0.05° and I2 = 0.15º (set #17 in Table 2). We show the ratio between the semi-major axes (top), the inclination of Ariel (middle), and the inclination of Umbriel (bottom) as a function of time. Each column corresponds to a different simulation. We show an example of a system that is permanently caught in resonance (a), one that is captured but evades the resonance in less than 10 Myr (b), and another that skips the resonance without capture (c). The blue line gives the asymptotic evolution predicted by Eq. (73), while the dashed line gives the position of the nominal resonance Eq. (77). The orange dots mark the present mean inclinations (Table 1). |
| In the text | |
|
Fig. 9 Histograms for the final distribution of the inclinations of Ariel (top) and Umbriel (bottom) for different sets of initial conditions. We also plotted the best fit Rice distribution (Eq. (95)) to each histogram (red curve) and the corresponding mean inclination, 〈I〉, and standard deviation, ∆I. We used the sets #9 (left), #17 (centre), and #19 (right) from Table 2. |
| In the text | |
|
Fig. 10 Variation in the average inclination of Umbriel after crossing the 5/3 MMR as a function of the initial inclination of Ariel. The points are taken from the simulations #11 to #25 in Table 2, and the line gives the adjustment of a linear regression. |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.