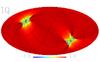
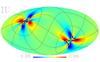
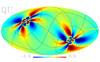
Fig. 3
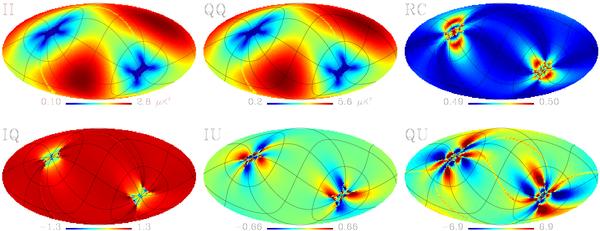
Top: MADping pixel variances for temperature and polarization and the reciprocal condition number of the pixel observation matrices. Bottom: correlation coefficient × 103 between I − Q, I − U and Q − U pixels. This part of the noise covariance is dominated by white noise which is modeled equivalently in all three paradigms. Hence, MADmap, ROMA, Madam and Springtide results are nearly identical. Maps are rotated into galactic coordinates to show the structure near the ecliptic poles.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.