| Issue |
A&A
Volume 563, March 2014
|
|
|---|---|---|
| Article Number | A105 | |
| Number of page(s) | 17 | |
| Section | Cosmology (including clusters of galaxies) | |
| DOI | https://doi.org/10.1051/0004-6361/201322372 | |
| Published online | 17 March 2014 | |
Online material
Appendix A: Simulations
Simulated data
The LGMCA algorithm is applied to the WMAP and Planck data, which is simulated by the Planck Sky Model5 (PSM; Delabrouille et al. 2013). The PSM models the instrumental noise, the beams, and the astrophysical foregrounds in the frequency range that is probed by WMAP and Planck. The simulations were obtained as follows:
-
Frequency channels: the simulated data contains the 14 WMAP andPlanck frequency channels ranging from 23to 857 GHz. The frequency-dependent beams are assumed to be isotropic Gaussian PSFs.
-
Instrumental noise: instrumental noise has been generated according to a Gaussian distribution, with a covariance matrix provided by the WMAP (9-year) and the Planck consortia.
-
Cosmic microwave background: the CMB map is drawn from a Gaussian random field with WMAP 9-year best-fit theoretical power spectrum (from the 6 cosmological parameters model). No non-Gaussianities, such as lensing or ISW effects, have been added to the CMB map.
-
Synchrotron: this emission arises from the acceleration of the cosmic-ray electrons in the magnetic field of our Galaxy. It follows a power law with a spectral index that varies across pixels from −3.4 and −2.3 (Bennett et al. 2003). In the Planck data, this component mainly appears at lower frequency observations (typ. ν < 70 GHz).
-
Free-Free: the free-free emission is due to the electron-ion scattering and follows a power law distribution with an almost constant spectral index across the sky (~-2.15) (Dickinson et al. 2003).
-
Dust emission: this component arises from the thermal radiation of the dust grains in the Milky Way. It follows a gray-body spectrum that depends on two parameters: the dust temperature and the spectral index (Finkbeiner et al. 1999). Recent studies that involve the joint analysis of IRIS and Planck 545 and 857 Ghz observations show significant variations in both the dust temperature and the spectral index across the sky on both large and small scales (Planck Collaboration 2011a).
-
AME: the AME (anomalous microwave emission) – or spinning dust – may develop from the emission of spinning dust grains. This component has a spatial correlation with the thermal dust emission but has an emissivity that roughly follows a power law in the frequency range of Planck and WMAP (Planck Collaboration 2011b).
-
CIB: cosmological infrared background comes from the emission of unresolved galaxies at high redshifts.
-
CO: CO emission has been simulated using the DAME H1 line survey (Dame et al. 2001).
-
SZ: the Sunyaev-Zel’Dovich effect results from the interactions of the high energy electrons and the CMB photons through inverse Compton scattering (Sunyaev & Zeldovich 1970). The SZ electromagnetic spectrum is well known to be constant across the sky.
-
Point sources: these components belong to two categories of radio and infra-red point sources, which can have Galactic or extra-Galactic origins. Most of the brightest compact sources are found in the ERCSC catalog provided by the Planck mission (Planck Collaboration 2011c). These point sources have individual electromagnetic spectra.
The same IRIS 100 μm map and parameters, as listed in Table 1, were used for LGMCA.
Recovered maps
The recovered CMB map is displayed in Fig. A.1. The error map, defined as the difference between the estimated and the input CMB maps, is shown in Fig. A.2. For a better visualization of the foreground residuals, the error map has been downgraded to a resolution of 1.5 degrees. The error map contains some traces of instrumental noise as well as some foreground residuals. Apart from some of the point sources at high latitudes, most foreground residuals seem to be concentrated in the vicinity of the Galactic center, which is expected.
To evaluate the quality of our estimated CMB map, the correlation coefficient of the estimated CMB map with the input foregrounds has been calculated and is displayed in Fig. A.3. Apart from the CIB, none of the foreground components have a correlation coefficient that exceeds 0.05. Interestingly, as conjectured from the analysis of the Planck PR1 data in Sect. 3.4.2, the CIB contamination increases on small scales with the correlation coefficient reaching to about 0.3. In this evaluation, no mask has been used to obtain a full-sky CMB map estimate.
 |
Fig. A.1
CMB estimated from simulated WMAP and Planck data. |
| Open with DEXTER | |
 |
Fig. A.2
Residual map defined as the difference between the estimated CMB and the true simulated CMB map at resolution 1.5 degree. |
| Open with DEXTER | |
 |
Fig. A.3
Correlation coefficient in the harmonic space of the input foregrounds with the estimated CMB map. Error bars are set to 1σ and computed from 50 Monte-Carlo simulations of CMB + noise. |
| Open with DEXTER | |
Assessing the uncertainty of the estimated CMB map
Uncertainty estimation from simulations:
even if the foregrounds have been properly removed from the estimated map, we have to weigh the pixels in the map by the variance of the estimator. This would require performing Monte-Carlo simulations for all the components that compose the data, i.e. the CMB, the instrumental noise, and the foregrounds, which are clearly unavailable. A more practical approach is to derive an uncertainty map that relies on measuring the variance from the error map – displayed in Fig. A.2.
We define  as the estimator variance in the pixel domain and propose estimating by the local variance of the error map. As a result, the uncertainty map, featured in Fig. A.4, has been computed by measuring the variance of the error map on overlapping patches of size 16 × 16 pixels. This particularly assumes that the uncertainty is stationary within each patch. As expected, with the exception of the point sources, the uncertainty map is mainly dominated by instrumental noise at high latitudes and by foreground residuals in the vicinity of the Galactic center. We then define the normalized error by
as the estimator variance in the pixel domain and propose estimating by the local variance of the error map. As a result, the uncertainty map, featured in Fig. A.4, has been computed by measuring the variance of the error map on overlapping patches of size 16 × 16 pixels. This particularly assumes that the uncertainty is stationary within each patch. As expected, with the exception of the point sources, the uncertainty map is mainly dominated by instrumental noise at high latitudes and by foreground residuals in the vicinity of the Galactic center. We then define the normalized error by  where x̂ stands for the estimated CMB map, and x⋆ is the input one. A proper estimation of should be such that the normalized error ϵ asymptotically follows a Gaussian distribution with mean zero and variance one (standard normal distribution). The histogram of the normalized error is shown in Fig. A.5. The resulting normalized error is indeed close to a standard normal distribution.
where x̂ stands for the estimated CMB map, and x⋆ is the input one. A proper estimation of should be such that the normalized error ϵ asymptotically follows a Gaussian distribution with mean zero and variance one (standard normal distribution). The histogram of the normalized error is shown in Fig. A.5. The resulting normalized error is indeed close to a standard normal distribution.
 |
Fig. A.4
Uncertainty map of the estimated CMB map in the pixel domain. |
| Open with DEXTER | |
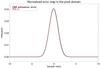 |
Fig. A.5
Histogram of the normalized error map in the pixel domain (solid black curve) and standard normal distribution (dotted red curve). |
| Open with DEXTER | |
The foreground and the instrumental noise residuals are expected to be spatially correlated and, therefore, cannot be characterized well in the pixel domain. It can be complemented by evaluating the uncertainty in the spherical harmonics domain. Assuming that the expected uncertainty is isotropic, the CMB map uncertainty can be approximated by the power spectrum of the error map, in other words by the variance of its spherical harmonics coefficients, or aℓm. The resulting power spectrum  is shown in Fig. A.6. As in the pixel domain, one can compute the normalized error in spherical harmonics:
is shown in Fig. A.6. As in the pixel domain, one can compute the normalized error in spherical harmonics:
 where
where
 and
and  stand for the spherical harmonics coefficients of the estimated and the input CMB maps. The histogram of the normalized error in the spherical harmonics domain is shown in Fig. A.7. As expected, the error distribution is close to a standard normal distribution.
stand for the spherical harmonics coefficients of the estimated and the input CMB maps. The histogram of the normalized error in the spherical harmonics domain is shown in Fig. A.7. As expected, the error distribution is close to a standard normal distribution.
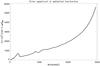 |
Fig. A.6
Uncertainty spectrum of the estimated CMB map in the harmonic domain. |
| Open with DEXTER | |
 |
Fig. A.7
Histogram of the normalized error map in the harmonic domain (solid black curve) and standard normal distribution (dotted red curve). |
| Open with DEXTER | |
Case of real data:
the accurate estimation of the CMB map uncertainty is very challenging in the case of real data because it is quite complex to estimate the errors at the level of CMB fluctuations or below. The quality map derived in Sect. 3 can only capture errors that are above the average noise level in the wavelet domain but is not sensitive to errors that lie below the CMB fluctuations.
There are two sources of error that can contaminate the CMB: i) remaining instrumental noise; ii) foreground residuals. For real data, the contribution of the remaining instrumental noise to the estimate of the total error of the CMB map can be derived by computing the local variance of the half-ring difference. However, as explained previously, estimating the level of foreground residuals in the final map can only be obtained by performing simulations. In reality, simulations are only reliable on large scales where the sky has been accurately observed and studied. Therefore, we propose two approaches to estimating the uncertainty of the estimated CMB map on large scales:
-
Conservative estimate: apart from the point source resid-ual, the level of foreground residuals increases towards theGalactic center. A conservative approach is to estimate thelevel of foreground residuals from simulations by com-puting the variance of the error map in bands of latitudesof 0.25 degrees. The total error esti-mate, shown in Fig. A.8, is then obtained by addingthe resulting foreground residual variance and the noise variancederived from WMAP noise simulations and the Planck half ringdifference. This error map provides a rough estimate of the erroracross latitude but is not an accurate estimate along the longitude,specifically around the Galactic center where the error variationsalong the longitude is not small. This map will be made availableas a product (see Sect. 4).
-
Large-scale estimate: the latest version of the Planck sky model (PSM) includes physical models for the foreground components, which have been derived from the various Galactic studies. Therefore, the PSM is quite reliable at resolutions where the sky is accurately studied (i.e. resolutions greater than about 1 degree). We can therefore estimate the level of the foreground residual by computing the local variance of the error map smoothed at one degree resolution. The final error estimate, shown in Fig. A.9, is then obtained by adding the resulting foreground variance and the noise variance derived from WMAP noise simulations and the Planck half ring difference.
These maps provide a rough idea of the level of uncertainty of the CMB map, which also help to define reliable regions for further studies (non-Gaussianities, power spectrum estimation, etc.).
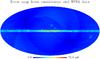 |
Fig. A.8
Uncertainty map estimated by combining a level of foreground residuals estimated in bands of latitudes and the level of noise from WMAP and Planck data. |
| Open with DEXTER | |
 |
Fig. A.9
Uncertainty map estimated by combining a level of foreground residuals at one degree resolution and the level of noise from WMAP and Planck data. |
| Open with DEXTER | |
© ESO, 2014
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.