Fig. 2
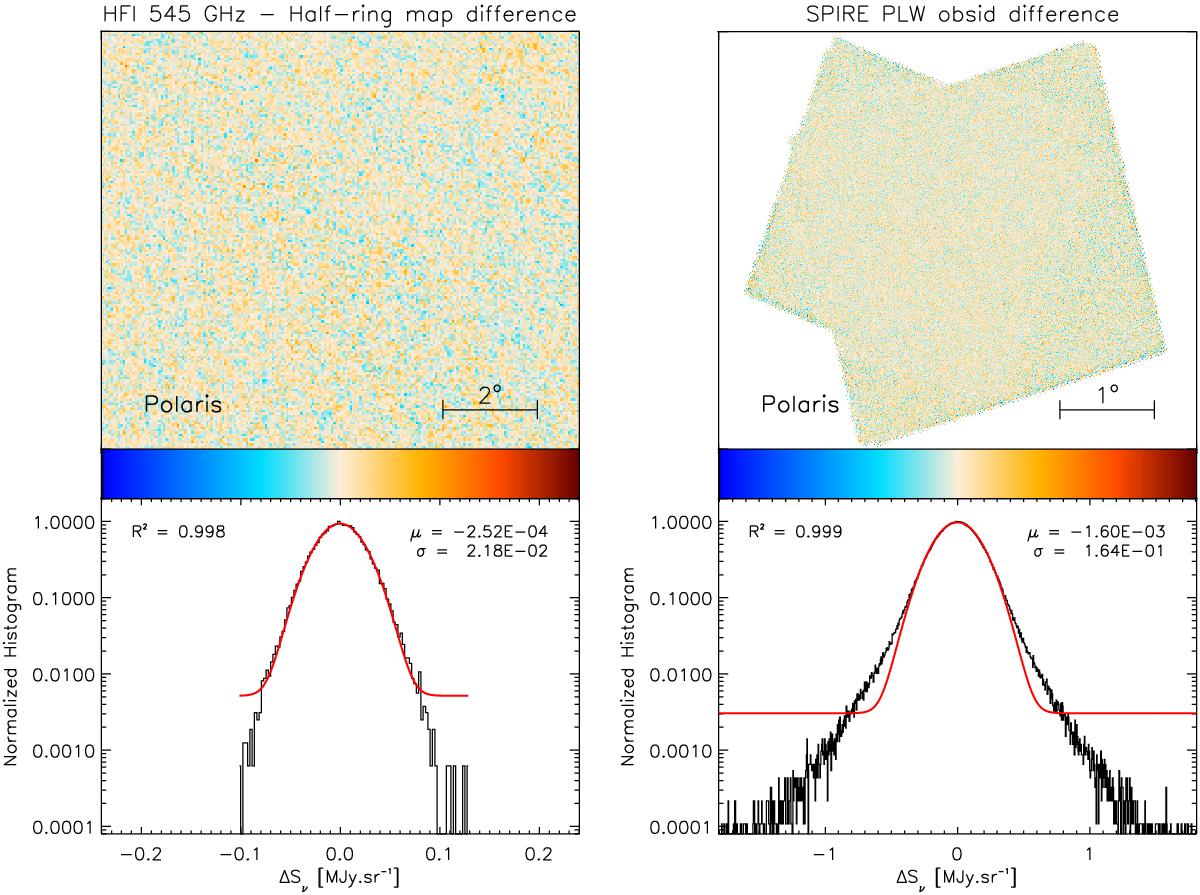
Left: HFI 545 GHz noise map of the Polaris field obtained from the difference of the two independent half-ring maps of the same field (see text). The bottom panel shows the normalized histogram of brightnesses in the difference map (black) and a Gaussian fit to the distribution (red), with the mean μ, dispersion σ, and coefficient of determination R2 as an estimator of the “goodness of fit”9. Right: SPIRE PLW (500 μm) Polaris field noise map and histogram obtained from the difference between maps produced from scans in the nominal and orthogonal orientation, appropriately reweighted by the coverage map. The individual 3° × 3° and ![]() subfields were mapped at different times and so the effective noise is lower where they overlap. Likewise, the largest noise occurs at the edges of the subfields where the coverage by the bolometer arrays is least.
subfields were mapped at different times and so the effective noise is lower where they overlap. Likewise, the largest noise occurs at the edges of the subfields where the coverage by the bolometer arrays is least.


Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.