| Issue |
A&A
Volume 569, September 2014
|
|
|---|---|---|
| Article Number | A16 | |
| Number of page(s) | 19 | |
| Section | Astronomical instrumentation | |
| DOI | https://doi.org/10.1051/0004-6361/201322991 | |
| Published online | 10 September 2014 | |
Analysis of on-sky MOAO performance of CANARY using natural guide stars
1
LESIA, Observatoire de Paris – CNRS – UPMC – Université Paris
Diderot, 5 place Jules
Janssen, 92190
Meudon,
France
e-mail:
This email address is being protected from spambots. You need JavaScript enabled to view it.
2
Centre for Advanced Instrumentation, Durham University,
South Road,
Durham
DH1 3LE,
UK
3
GEPI, Observatoire de Paris – CNRS – Université Paris Diderot,
5 place Jules
Janssen, 92190
Meudon,
France
4
UKATC, Royal Observatory Edinburgh, Blackford Hill, Edinburgh
EH9 3HJ,
UK
Received:
6
November
2013
Accepted:
5
June
2014
Abstract
The first on-sky results obtained by CANARY, the multi-object adaptive optics (MOAO) demonstrator, are analysed. The data were recorded at the William Herschel Telescope, at the end of September 2010. We describe the command and calibrations algorithms used during the run and present the observing conditions. The processed data are MOAO-loop engaged or disengaged slopes buffers, comprising the synchronised measurements of the four natural guide stars (NGS) wavefront sensors running in parallel, and near infrared (IR) images. We describe the method we use to establish the error budget of CANARY. We are able to evaluate the tomographic and the open loop errors, having median values around 216 nm and 110 nm respectively. In addition, we identify an unexpected residual quasi-static field aberration term of mean value 110 nm. We present the detailed error budget analysed for three sets of data for three different asterisms. We compare the experimental budgets with the numerically simulated ones and demonstrate a good agreement. We find also a good agreement between the computed error budget from the slope buffers and the measured Strehl ratio on the IR images, ranging between 10% and 20% at 1530 nm. These results make us confident in our ability to establish the error budget of future MOAO instruments.
Key words: instrumentation: adaptive optics / atmospheric effects / techniques: high angular resolution
© ESO, 2014
1. Introduction
The understanding of the physics and of the formation of high redshift galaxies requires the multiplexed observations of very large number of targets with spatial and spectral resolution capabilities. Because of their faintness this science case also requires the photon-collecting area of an extremely large telescope (ELT) of 30−40 m class. During the E-ELT instrument phase A studies several MOS concepts were studied, amongst which EAGLE (Cuby et al. 2010), a near infrared multi-integral field spectrograph fed by multi-object adaptive optics (MOAO; Hammer et al. 2002).
EAGLE is a near-infrared (IR) multi-object integral field spectrograph with 37.5 mas spatial sampling and a spectral resolution of 4000. It aims to simultaneously analyse 20 targets in a wide field of view (FOV) of about 7.5 arcmin in diameter. Thanks to the small angular size of the high-z galaxies, adaptive optics (AO) is required (Puech et al. 2010). Indeed, all the ground-based large telescopes suffer from spatial resolution degradations due to atmospheric turbulence, leading to an image full width at half maximum (FWHM) of the order of 1 arcsec. To overcome these effects, AO is required to compensate for the wavefront distortions in real time as demonstrated at the end of the 1980s in astronomy (Rousset et al. 1990). However, conventional AO is only able to compensate for turbulence across a relatively small FOV of the order of a few tens of arc seconds in the near-IR (H band for instance) due to the anisoplanatism effect. Therefore new AO technologies are required to overcome this strong limitation. Multiconjugate AO (MCAO; Beckers 1988; Marchetti et al. 2008) and ground layer AO (GLAO; Rigaut 2002; Milton et al. 2008) are novel AO system concepts that offer larger compensated FOV. However MCAO can deliver a good correction only in a FOV of the order of 1 or 2 arcmin while GLAO delivers a moderate correction, with a typical gain of a factor of 2 in FWHM with respect to the seeing (Bendek et al. 2011; Tokovinin et al. 2012), but in a much wider FOV up to the order of 10 arcmin.
It is not possible to design and implement an MCAO system covering such a wide FOV because of the conservation of beam étendue. Using the specific case of a high redshift galaxy programme, only the galaxies themselves are of interest for the AO correction, not the continuous FOV. In addition, their angular extent is very limited to the order of 1 or 2 arcsec. The multi-object AO concept was initially proposed to tackle this problem (Hammer et al. 2002). It aims to simultaneously compensate the turbulence for a large number of very faint small science objects distributed over a wide FOV. For that purpose one deformable mirror (DM) is implemented per target in a dedicated optical train feeding each integral field unit of a spectrograph. Moreover, the galaxies are too faint to be able to measure any wavefront distortion in real time. It is therefore necessary to find a number of bright guide stars (GS) within the wide instrumental FOV for that purpose. These guide stars can be natural GS (NGS), but for questions of sky coverage, laser GS (LGS) are needed. The light from each GS must be picked-off in the FOV and sent to a wavefront sensor (WFS). In such a configuration, the WFSs do not see any feedback from the correction applied on the DMs; they are thus working in an open loop mode. Finally all the WFS measurements made across the FOV must be mutually processed in order to reconstruct the 3D turbulent volume above the telescope. This is achieved using a tomographic approach (Ragazzoni et al. 1999). Then a projection of the volume in the direction of each target (Fusco et al. 2001; Vidal et al. 2010b) allows us to compute the correction to be applied to each DM in the system in open loop. A possible configuration for such a MOAO system is the one envisioned for the EAGLE instrument of the E-ELT (Rousset et al. 2010). It makes use of 6 LGSs at the periphery of the FOV and between 4 to 6 additional NGSs selected in the field. The two main critical features of MOAO are tomographic reconstruction of the turbulence and the DM operation in open loop.
In order to improve the technology readiness of the EAGLE instrument, a pathfinder was proposed to demonstrate the feasibility and the performance of MOAO (Myers et al. 2008): this is the CANARY project. A first on-sky testing of on-axis open-loop command has been already reported (Andersen et al. 2008) as well as first MOAO laboratory demonstrations (Ammons et al. 2010; Vidal et al. 2010a). The next step is to demonstrate on-sky the capability of the open loop tomography using a number of in-the-field GS, both laser and natural. This is the main goal of CANARY.
Tomography has been successfully demonstrated in MCAO with MAD at VLT on NGS only (Marchetti et al. 2008) and more recently with a 5 LGS constellation on GeMS at Gemini Observatory (Rigaut et al. 2013; Neichel et al. 2014). However, the MCAO approach uses multiple DMs conjugated at different altitude in the optical train of the instrument. This leads to a specificity of MCAO: the tomography problem is partially optically solved. This maybe directly taken into account by regularizing the pseudo-inverse of the interaction matrix between the WFSs and the DMs. In MCAO, Minimum Mean Square Error (MMSE) reconstructors without the turbulence profile knowledge still allows us to achieve a good level of performance (Vidal et al. 2013). In MOAO, with one DM per target the least-squares approach only leads to a partial correction of the wavefront, i.e. correcting only the ground layer. In fact, the knowledge of the turbulence profile is not crucial in MCAO but becomes a limiting factor in MOAO and is even more dramatic as the GS can be positioned farther off-axis from the target object.
Considering the open loop operation, typical DM errors such as creep and hysteresis have been studied earlier (Morzinski et al. 2008; Kellerer et al. 2012). For certain DM types including that in CANARY, they have been demonstrated to be small compared to the fitting error. In addition specific open loop procedures have to be developed as presented in Sect. 3 for CANARY.
In Sect. 2, we present the CANARY instrument with a
hardware and software description and in Sect. 3 the
control and calibration algorithms. The data reduction approach is described in Sect. 4. In particular, the error budget computation is
detailed. Section 5 presents the on-sky results, the
observing conditions and introduce the three selected NGS asterisms. The data are processed
to retrieve a 15 layer  profiles
in order to quantify the tomographic and open loop errors. Section 6 gives the detailed error budgets established for three sets of data
during one night of observations. The results are compared to numerical simulations. We
conclude in Sect. 7.
profiles
in order to quantify the tomographic and open loop errors. Section 6 gives the detailed error budgets established for three sets of data
during one night of observations. The results are compared to numerical simulations. We
conclude in Sect. 7.
2. The CANARY instrument
2.1. Introduction
The CANARY pathfinder implements a single target channel of a MOAO system and is deployed at one of the Nasmyth foci of the 4.2 m William Herschel Telescope (WHT) at the Roque de Los Muchachos Observatory on the island of La Palma in Spain. CANARY is a fast track experiment. The design phase started beginning of 2008 while the first light happened in September 2010 (Gendron et al. 2011). CANARY is a project planned in three phases (respectively called A, B, C), each phase of increasing system complexity (Myers et al. 2008). It will lead to a comprehensive demonstration of the MOAO configuration as foreseen for EAGLE on the E-ELT (Rousset et al. 2010). Phase A makes first use of three open-loop off-axis NGS WFSs and one on-axis open-loop-controlled DM of 8 × 8 actuator array. Phase B will use, in addition, four Rayleigh LGS to augment the turbulence tomography in open loop (see Fig. 1). Phase C will introduce the full configuration proposed for EAGLE. We will use a woofer DM in closed-loop (in fact the 8 × 8 actuator DM), as a first stage simulating M4 of the E-ELT (Vernet et al. 2012) with an open-loop tweeter DM as a second stage simulating the MOAO channel. The tweeter DM in Phase C will be a higher-order DM from ALPAO with 17 × 17 actuators (241 useful). In order to reconfigure the system between the three phases, the optical design is build around a set of interchangeable optical modules. The Rayleigh LGSs used for these demonstrations have variable range-gate height and extension in order to simulate many of the LGS effects that will be encountered at the E-ELT.
 |
Fig. 1 CANARY MOAO demonstration configuration. Phase A of the system (left) uses three off-axis NGS to reconstruct the wavefront while one deformable mirror is driven in open loop on the on-axis star. Phase B (right) added 4 Rayleigh LGS in addition of the three NGS. |
2.2. Phase A system
 |
Fig. 2 CANARY input focal plane, equipped with a target acquisition system (TAS) carrying 3 off-axis WFS working in open loop. Light from the central star is transported by the off-axis parabolic relay including the tip-tilt stage (TT) and the deformable mirror (DM) to the output corrected focus. At this focus, the light is reflected in the visible by a dichroic plate to a fourth WFS called the Truth Sensor. Finally, the IR light is transmitted to the IR camera observing at a central wavelength of λ = 1530 nm. |
 |
Fig. 3 Zoom of the CANARY focal plane. Upper part illustrates the on-sky configuration where the off-axis light is reflected to the off-axis WFS. The light from the central star is sent via the DM and TT to the IR camera and TS. Lower part illustrates the open-loop calibration configuration using the reverse path calibration source. The light is illuminating the DM and TT and is retroreflected at the focal plane on one off-axis WFS. This allows us to retrieve interaction matrices for the off-axis WFS and compute misalignment and scaling errors between all the WFS. |
At the entrance of the bench, upstream of the Nasmyth focal plane, the field rotation is compensated using a K-mirror derotator. CANARY is equipped with three WFS that are able to patrol the derotated field (2.5′ in diameter, plate scale 0.22 mm arcsec-1) and acquire the selected off-axis NGSs. The star that mimics the corrected science target is situated at the centre of the field. This on-axis central star is observed by an IR imaging camera and a fourth WFS called Truth Sensor (TS) which measures the DM-corrected wavefront (Figs. 2 and 3).
The four WFS are identical, of Shack-Hartmann (SH) type, with 7 × 7 sub-apertures (only 36 illuminated). The total field of view per WFS sub-aperture is close to 4′′. They use Andor iXonEM 860 EMCCD cameras with 24 μm pixel size, featuring 128 × 128 pixels. The measured read-out noise is 0.3, 0.5, 0.55 and 0.7 e− rms per pixel for the four cameras due to the Electron Multiplication gain. We use 16 × 16 pixels of ≈0.26″ scale in each SH sub-aperture. The minimum distance between two off-axis WFSs is 20″, limited by both hardware and software anti-collision systems.
The central star beam is sent to the performance diagnostic IR camera and TS via a two off-axis parabolic mirror relay. The relay includes the CILAS 8 × 8 piezostack array DM conjugated to the WHT pupil. This DM was manufactured in 1991 and previously used at ESO in the ADONIS instrument (Beuzit et al. 1994). It is made in a very hard piezoelectric material and exhibits very low hysteresis and creep effects (Kellerer et al. 2012). Wavefront errors caused by “creeping” of the DM surface are observed but their effet on performance is minimal. The high-speed tip-tilt mirror is a copy of that used in the VLT instrument SPHERE (Beuzit et al. 2008). The mirror pointing is controlled by a servo-loop based on internal position sensors to minimise open-loop error.
At the output of the relay, the beam is split by a dichroic plate: the transmitted IR flux (1 to 2.5 μm) is sent to the IR camera. This is a Xeva-1.7-320 from Xenics, featuring 320 × 256 pixels of 30 μm pitch, with a measured readout noise of 200 ± 30 e− rms per pixel and a gain of 10 e− ADU-1. The plate scale of the IR camera is 0.0371″ per pixel. The combination of the H filter bandwidth, the QE efficiency of the camera and the atmosphere absorption gives an effective wavelength of the IR image centered at λ = 1530 nm with a bandwidth of Δλ = 160 nm. The visible part of the spectrum (below 900 nm) is reflected by the dichroic and goes to the TS. The TS allows us to check the efficiency of the turbulence compensation in real-time, to perform system calibration tasks and to close the loop for performance comparison between conventional closed loop AO (hereafter called single conjugate AO, SCAO) and open loop MOAO.
A telescope, turbulence and star simulator allow us to fully characterise the system when under testing in the laboratory or during daytime maintenance at the telescope. A deployable acquisition camera can be inserted to observe the whole field (2.5 arcmin diameter) for calibration of the telescope pointing and guide star acquisition. The entrance focal plane of CANARY is also equipped with deployable calibration sources of various diameters to emulate both seeing or diffraction-limited sources. In addition, a specific feature is the so-called reverse-path calibration source, discussed in Sect. 3.1. A more detailed overview of the CANARY can be found in (Gendron et al. 2010).
2.3. Real-time computer
The real-time computer (RTC), called DARC (Durham Adaptive optics Real time Controller) is described in Dipper et al. (2010) and Basden et al. (2010). The system is driven at a selectable sampling frequency of up to 250 Hz, limited by the WFS camera readout rate. The four WFS cameras are synchronised and read through dedicated FPGA-based hardware. The AO controller is CPU based, and optimised for multi-threaded operation on multi-CPU architectures. It exhibits 0.7 ms latency between the latest readout pixels of the WFSs and the time when the DM actuators are reaching half-stroke value. DARC also allows clients to obtain continuous or sub-sampled real-time data streams of SH images, slopes, and DM command voltages. DARC also features a number of different real-time algorithms. The SH image processing algorithm uses adaptive windowing (12 × 12 pixels) of the SH spots on a sub-aperture-by-sub-aperture basis, together with centroiding done on 10 brightest pixels (Basden et al. 2012). These features allowed us to cope with the dynamics required for open-loop wavefront sensing depending on the observing conditions and to reduce the effect of readout noise.
2.4. Loop delay
We measured the loop delay by introducing a known, white noise, voltage pattern on the DM command. By recording synchronised sets of TS slopes and DM voltages, we can deduce the delay from the WFS measurements. We measured a 1.5 and 1.9 frame delay at 150 and 250 Hz respectively. We define delay as the time taken from the beginning of the WFS integration to the application of the corresponding command on the DM.
3. Control and calibrations algorithms
3.1. Interaction matrices and deviations
The interaction matrix between the DM and the truth sensor is an important calibration item in the control of CANARY. As in conventional AO, the interaction matrices reflect the optical relationship between the DM and the WFSs (Boyer et al. 1990). They are measured experimentally by actuating the mirror and measuring the impact on a given wave-front sensor. They are even more important in our open-loop scheme, since we are now concerned with not only the relative amplitude between coefficients, but also with their absolute amplitude. Whereas a global multiplicative factor would just act as a loop gain when operating in closed loop, here it will operate as a scaling factor on the correction. In CANARY, we have chosen to simultaneously activate all actuators (Kellerer et al. 2012; Marchetti et al. 2008) with a sinusoidal wave pattern using a specific temporal frequency for each and retrieve the matrix from the WFS measurements using a lock-in approach. This particular method has been demonstrated (Vidal 2009; Kellerer et al. 2012) to be one of the best for identifying the DM model. The method has also demonstrated excellent on-sky capabilities for interaction matrix identification with the TS, the quality of the non-zero matrix coefficients only differs by 2% from the laboratory ones. We will call Mi the interaction matrix between DM and TS, and Mc its generalised inverse. The matrix Mc is computed using a singular value decomposition of Mi. We observe a significant drop-off of the last eigenvalues and filtered the last 7 modes to keep a conditioning number of 50.
In an open-loop scheme, the focal plane off-axis wave-front sensors have no optical feedback from the deformable mirror. This, in turns, means that no interaction matrix can be measured physically, since the WFS do not see the DM. This limitation, inherent to the MOAO scheme, is a severe drawback since the optical relation between wave-front sensors and DM does exist within the tomographic reconstructor. That is why CANARY is equipped with a reverse path calibration source, which is a seeing-limited source illuminating the DM from the output focal plane to one of the open-loop WFS located in the input focal plane. This is achieved using a retroreflector system, which preserves the pupil orientation (see Fig. 3). Therefore we are able to record interaction matrices with each off-axis WFS, despite the open-loop scheme. Those matrices are the starting point for finding out all instrumental model parameters which are: pupil image translations and magnifications, rotations of the lenslet arrays and of the WFS cameras, and WFS sensitivities. This tool was first used for the purpose of fine alignment and also for final calibration of all the WFS parameters (Vidal et al. 2010b; Brangier 2012). These parameters could then be taken into account in the computation of the tomographic reconstructor.
3.2. The Learn & Apply tomography algorithm
The linear tomographic reconstruction matrix is derived using the Learn & Apply (L&A) algorithm from (Vidal et al. 2010b), where the minimum mean square error (MMSE) reconstructor is computed from an atmospheric model directly identified on-sky from the WFS measurements. Engaging the open-loop compensation is preceded by the acquisition of an on-sky WFS data set, from which the optimized estimator is deduced. We detail hereafter the implementation.
We define notations as follows. The set of local wavefront slopes along x and y directions, measured by a
WFS i with
p
sub-apertures, is collected into a slope vector Si After
acquisition of number of frames nframe of an on-sky WFS data set we build
a matrix Moffaxis by concatenating horizontally the
column-vectors formed by synchronous measurements t = [
1,...,nframe ]
from the n
off-axis WFSs. Each WFS slope is subtracted from its own reference slope (Sref
i) including all the static aberrations for
the observing direction of the NGS i (see Sect. 3.5).
After
acquisition of number of frames nframe of an on-sky WFS data set we build
a matrix Moffaxis by concatenating horizontally the
column-vectors formed by synchronous measurements t = [
1,...,nframe ]
from the n
off-axis WFSs. Each WFS slope is subtracted from its own reference slope (Sref
i) including all the static aberrations for
the observing direction of the NGS i (see Sect. 3.5).  Similarly,
in the same time, synchronous slope vector measurements from the on-axis truth sensor are
concatenated in the same way to form the matrix Mcentral
Similarly,
in the same time, synchronous slope vector measurements from the on-axis truth sensor are
concatenated in the same way to form the matrix Mcentral Vidal et al. (2010b) infers that for this particular
turbulence sequence the best tomographic estimator Mt is the one that
directly links inputs and outputs (i.e. Moffaxis and Mcentral) as
Vidal et al. (2010b) infers that for this particular
turbulence sequence the best tomographic estimator Mt is the one that
directly links inputs and outputs (i.e. Moffaxis and Mcentral) as
 (1)and solving, in a
least-squares sense, this equation for Mt is given by (Vidal et al. 2010b)
(1)and solving, in a
least-squares sense, this equation for Mt is given by (Vidal et al. 2010b)  (2)It is noticeable
that this estimator Mt tends towards the
MMSE estimator as the acquisition time tends towards infinity (and under hypothesis of
stationarity), because both matrices
(2)It is noticeable
that this estimator Mt tends towards the
MMSE estimator as the acquisition time tends towards infinity (and under hypothesis of
stationarity), because both matrices  and
and
 tend towards the covariance
matrix of the sensor measurements. We respectively call these matrices COffOff and
COnOff. Then we can write Eq. (2) as
tend towards the covariance
matrix of the sensor measurements. We respectively call these matrices COffOff and
COnOff. Then we can write Eq. (2) as  (3)The covariance
between two elementary slopes in x of sub-apertures θ ∈ [
1,...,p ] and
ν ∈ [
1,...,m ] of
respectively two WFS i and j is noted ⟨
sxθsxν
⟩ ij. Here p and m are respectively the
total number of subapertures for WFS i and j. The covariance value can be theoretically
computed from the Kolomogorov covariance maps : expressions in direct space have been
given by (Butterley et al. 2006) and some
analytical approximations have recently been given by Martin et al. (2012). We expressed covariance in the Fourier domain for a single
turbulent layer as
(3)The covariance
between two elementary slopes in x of sub-apertures θ ∈ [
1,...,p ] and
ν ∈ [
1,...,m ] of
respectively two WFS i and j is noted ⟨
sxθsxν
⟩ ij. Here p and m are respectively the
total number of subapertures for WFS i and j. The covariance value can be theoretically
computed from the Kolomogorov covariance maps : expressions in direct space have been
given by (Butterley et al. 2006) and some
analytical approximations have recently been given by Martin et al. (2012). We expressed covariance in the Fourier domain for a single
turbulent layer as ![Mathematical equation: \begin{eqnarray} \mathcal{F} ( \langle s_{x\theta} \vec(k) s_{x\nu} \vec(k)\rangle_{ij}) && \propto k_x^2 \, \tilde{\Pi}_i(\vec{k}) \, \tilde{\Pi}^*_j(\vec{k}) \, r_0(h_l)^{-\frac{5}{3}} \, \| \vec{k} \|^{-\frac{11}{3}} \nonumber\\ \label{ExpressionCovariancegen}&&\times {\rm e}^{ -2{\rm i}\pi \left[ k_x (h_l(\alpha_i - \alpha_j) + x_{i\theta} - x_{j\nu} ) + k_y (h_l(\beta_i - \beta_j) + y_{i\theta} - y_{j\nu} ) \right]} \end{eqnarray}](/articles/aa/full_html/2014/09/aa22991-13/aa22991-13-eq57.png) (4)with
r0(hl)
the Fried parameter at altitude hl, k =
(kx,ky)
the conjugate Fourier variable of the separation r =
(x,y) between two sub-apertures i and j, and
(4)with
r0(hl)
the Fried parameter at altitude hl, k =
(kx,ky)
the conjugate Fourier variable of the separation r =
(x,y) between two sub-apertures i and j, and
 the Fourier transform of the
sub-aperture shape function Π(r) (i.e. equal to 1 within the
sub-aperture and 0 elsewhere). The separation between two WFS is characterised by the
difference in their pointing directions (αi,βi)
and (αj,βj),
and the altitude hl of the considered
layer.
the Fourier transform of the
sub-aperture shape function Π(r) (i.e. equal to 1 within the
sub-aperture and 0 elsewhere). The separation between two WFS is characterised by the
difference in their pointing directions (αi,βi)
and (αj,βj),
and the altitude hl of the considered
layer.
During a real scientific observation the number of time-independent realisations is
limited, which leads to covariance matrices that have partly converged. Moreover, the
general case is that it is impossible to acquire the data from the central direction with
the truth sensor because of the faintness of the scientific target. We have therefore
developed a method where we fit a model to the off-axis covariance matrices in order to
extract the essential parameters of the turbulence and WFS configurations. Therefore, we
are able to re-generate the modelled covariance matrices and compute the tomographic
estimator from Eq. (3). We call
COffOff
raw the real on-sky measured off-axis covariance matrix. In the
CANARY case during this first run, we also use the TS data to fit the COnOff raw
matrix. We typically use sets from 10 000 to 90 000 synchronised slopes (i.e from
≈1 to 10 mn at 150 Hz) to
compute the on-sky measured covariance matrices COffOff raw and COnOff raw. In
order to retrieve the parameters hl, r0(hl),
(αi, βi) and (αj, βj), we minimize the
distance ϵ
between the covariance matrix model to the measured one:  (5)We
use a Levenberg-Marquardt fitting algorithm to perform the minimisation of ϵ. The number of layers is
not retrieved by the algorithm but defined by the user before starting the fitting
procedure. This method allowed us to retrieve on-sky the turbulence profile and geometric
configuration from the recorded data in a few minutes. This step is called: Learn. In a
sense, the Learn resembles a SLODAR analysis, since it allows us to retrieve the
profile, with the minimization
process performing an inversion of the direct problem. However, the
profile is only a by-product of
the Learn, the real output being the modeled covariance matrices. Using the determined
turbulence and geometric parameters we compute the theoretical matrices COffOff and
COnOff, then using Eq. (3) we compute the tomographic estimator
Mt which will be used
in the RTC. We called this step Apply.
(5)We
use a Levenberg-Marquardt fitting algorithm to perform the minimisation of ϵ. The number of layers is
not retrieved by the algorithm but defined by the user before starting the fitting
procedure. This method allowed us to retrieve on-sky the turbulence profile and geometric
configuration from the recorded data in a few minutes. This step is called: Learn. In a
sense, the Learn resembles a SLODAR analysis, since it allows us to retrieve the
profile, with the minimization
process performing an inversion of the direct problem. However, the
profile is only a by-product of
the Learn, the real output being the modeled covariance matrices. Using the determined
turbulence and geometric parameters we compute the theoretical matrices COffOff and
COnOff, then using Eq. (3) we compute the tomographic estimator
Mt which will be used
in the RTC. We called this step Apply.
To retrieve the parameters we used the following procedure: a first calibration is ran on the bench using one phase screen to simulate the Ground layer. We record a set of WFS slopes on all the WFS. The parameters fitted (using LM algorithm) are the pupil misalignments (x,y, theta and magnification G) in addition to the altitude of the layer (known with a limited optical precision on the bench). Once the pupil misalignments known we use them to align better the system and iterate until the x,y, theta and G are close to 0 (or 1 for G) and become negligible. Simultaneously we fit the strengths and altitudes of the layers together with the on-sky WFS positions (see Sect. 5.5).
3.3. Software implementation
In MOAO mode, Mt is an output of
the L&A tomographic algorithm. We emphasise that this matrix is able to
reconstruct the slopes that the central sensor should see (Sc)
from the correlation with the off-axis slope measurements (S1,...,Sn).
Therefore, Mt is a slope
tomographic estimator for the central WFS:
 (6)In the phase A
configuration of CANARY we have 3 off-axis WFS and 1 central WFS (TS). For practical
implementation we also consider the TS as a fourth off-axis WFS and we have
(6)In the phase A
configuration of CANARY we have 3 off-axis WFS and 1 central WFS (TS). For practical
implementation we also consider the TS as a fourth off-axis WFS and we have
 (7)The three left quarters
of the matrix Mt, corresponding to
off-axis parts, are computed according to Eq. (2), the right quarter is zero-padded in order to ignore the TS slopes in the
command. We can therefore rewrite Mt as
(7)The three left quarters
of the matrix Mt, corresponding to
off-axis parts, are computed according to Eq. (2), the right quarter is zero-padded in order to ignore the TS slopes in the
command. We can therefore rewrite Mt as
 (8)In GLAO mode, we
average the slopes from the 3 off-axis WFSs leading to the matrix MtGLAO
defined as:
(8)In GLAO mode, we
average the slopes from the 3 off-axis WFSs leading to the matrix MtGLAO
defined as:  (9)with
Id being a
square identity matrix. The GLAO scheme presented here is achieved with the DM operating
in open-loop. This is slightly different to the usual GLAO definition that implies
closed-loop operation. The term GLAO used in the rest of this paper describes our
averaging of the open-loop off-axis WFS measurements, hence open-loop GLAO.
(9)with
Id being a
square identity matrix. The GLAO scheme presented here is achieved with the DM operating
in open-loop. This is slightly different to the usual GLAO definition that implies
closed-loop operation. The term GLAO used in the rest of this paper describes our
averaging of the open-loop off-axis WFS measurements, hence open-loop GLAO.
Finally, as the TS is placed after the DM, we can use it to close the loop in SCAO mode.
We disable the off-axis WFS slopes by filling the off-axis WFS part of the reconstructor
with zeros. The SCAO reconstructor becomes  (10)In CANARY, the TS
command matrix Mc (see also Sect. 3.1) is a 72-by-54 array. This command matrix is used to link the slopes
in the central direction (Sc, for instance
predicted by the Mt matrix) to the
voltage to apply on the DM. The final tomographic command matrix (the one loaded in the
RTC), is noted Mct and is defined by
(10)In CANARY, the TS
command matrix Mc (see also Sect. 3.1) is a 72-by-54 array. This command matrix is used to link the slopes
in the central direction (Sc, for instance
predicted by the Mt matrix) to the
voltage to apply on the DM. The final tomographic command matrix (the one loaded in the
RTC), is noted Mct and is defined by
 (11)Depending on the mode
we are running (MOAO, GLAO or SCAO), we use the corresponding Mt matrix
(Mt, MtGLAO or
MtSCAO).
(11)Depending on the mode
we are running (MOAO, GLAO or SCAO), we use the corresponding Mt matrix
(Mt, MtGLAO or
MtSCAO).
3.4. AO controller
In close loop configuration (SCAO) we use a conventional integrator temporal controller
which takes the form  (12)with
Si(t)
the current slopes vector measurement and Sref i
the reference slopes vector of the ith WFS. The parameter g is the temporal loop gain
of the integrator (Gendron & Léna 1995). In
the RTC implementation, g is a vector with a size of the number of actuators
(54). It is possible in particular to filter the DM and the Tip-Tilt voltages differently.
Notice in Eq. (12) that the measurements
from the off-axis WFSs are unused due to the zero terms in the identity matrix defining
MctSCAO (Eq. (10)). Only the slopes from the TS are actually
used to compute the DM voltages in this close loop configuration.
(12)with
Si(t)
the current slopes vector measurement and Sref i
the reference slopes vector of the ith WFS. The parameter g is the temporal loop gain
of the integrator (Gendron & Léna 1995). In
the RTC implementation, g is a vector with a size of the number of actuators
(54). It is possible in particular to filter the DM and the Tip-Tilt voltages differently.
Notice in Eq. (12) that the measurements
from the off-axis WFSs are unused due to the zero terms in the identity matrix defining
MctSCAO (Eq. (10)). Only the slopes from the TS are actually
used to compute the DM voltages in this close loop configuration.
The open-loop controller is a temporal filter of the form  (13)This controller is used
for both GLAO and MOAO open loop modes. As the last quarter part of the Mct is filled
with zeros, only the off-axis slopes are used to compute the vector Vt.
(13)This controller is used
for both GLAO and MOAO open loop modes. As the last quarter part of the Mct is filled
with zeros, only the off-axis slopes are used to compute the vector Vt.
The final set of voltages to be applied to the DM by the RTC is in fact the vector
U:  (14)The offset vector
Voffset is the static shape
to be applied to the DM in order to produce the best static point spread function (PSF) on
the IR camera. The computation of this vector is given in the next section.
(14)The offset vector
Voffset is the static shape
to be applied to the DM in order to produce the best static point spread function (PSF) on
the IR camera. The computation of this vector is given in the next section.
3.5. Reference slopes calibration and DM offset
The TS reference slopes SrefTS are deduced by recording the average position of the SH spot, SPlaneWF, with a reference source producing a flat wavefront placed at the entrance of the TS. We then close the loop on the TS in SCAO mode on the internal calibration source. We measure the non common path aberrations (NCPA) between the TS iteratively with a phase diversity algorithm (see Sauvage et al. 2007). We subtract their contribution, expressed in terms of slopes SNCPA, to the plane wavefront reference slopes to compute the final TS reference slopes: SrefTS = SPlaneWF − SNCPA.
The determination of Sref i is different. In open loop, the off-axis WFSs measure their own aberrations, plus the telescope field aberrations and the derotator quasi-static aberrations in addition to the turbulence. These static aberrations are not compatible with the tomographic model underlying the estimator Mt, and they must be treated separately. The strategy is just to consider them as constant over the interval of observation, and subtract them from the measurements as reference slopes. We measure them in-situ by averaging a long time sequence of the turbulence (we use the same sequence that served to compute the tomographic estimator) measured by all the WFSs: Sref = ⟨ Sturbu ⟩ t + Sstatic. As the turbulence has a zero average ⟨ Sturbu ⟩ t = 0, the average value of slopes measured by the off-axis WFSs are their corresponding static aberrations in the field and are set as reference slopes Sref i = Sstatic i.
3.6. DM offset voltages
The on-axis telescope and derotator quasi-static aberrations Sstatic
TS can also be measured using the same procedure. These measured
on-axis aberrations are subtracted from the TS reference slopes in order to find the
aberration slopes. To ensure their compensation on-axis, these slopes have to be converted
into a static voltage vector Voffset (also taking into
account the NCPA):  (15)The vector
Voffset remains applied on
the DM (Eq. (14)) during the whole
duration of the observation in open loop.
(15)The vector
Voffset remains applied on
the DM (Eq. (14)) during the whole
duration of the observation in open loop.
This strategy works provided the condition ⟨
Sturbu ⟩ t =
0 is respected, otherwise a static error will propagate through the
estimator Mt due to incorrect
reference slopes, and will add to the DM due to an incorrect Voffset. This is exactly what
is observed in reality, but we are fortunately able to demonstrate that those two errors
terms opportunely cancel each other (or at least partly, under certain conditions). For
the sake of simplicity in this explanation, we will lighten our notation. We call
s the
vector of the static term for the off-axis WFS, and t the turbulence. We write
s′ and t′ the same
quantities measured by the on-axis truth sensor. We also define r, the reference slope
vector on the truth sensor. As said previously, the average of the quantities related to
turbulence are non-zero, and we have ⟨
t ⟩ = ϵt ≠
0 and  . Our hypothesis is that, as
the estimator Mt is linear and
designed to work on turbulence, we have
. Our hypothesis is that, as
the estimator Mt is linear and
designed to work on turbulence, we have  (16)Now,
at the end of the calibration of the reference slopes and the DM offsets, the off-axis WFS
will be set with (s +
ϵt) as their reference
slopes, and the DM offset will be
(16)Now,
at the end of the calibration of the reference slopes and the DM offsets, the off-axis WFS
will be set with (s +
ϵt) as their reference
slopes, and the DM offset will be  (we skip Mc for the sake
of simplicity). Both terms contain errors, as they include partly-converged quantities
ϵ. However,
now the measurements from the off-axis WFS for any turbulence t are (s + t − s
− ϵt). Thus, the total
voltage applied on the DM will be
(we skip Mc for the sake
of simplicity). Both terms contain errors, as they include partly-converged quantities
ϵ. However,
now the measurements from the off-axis WFS for any turbulence t are (s + t − s
− ϵt). Thus, the total
voltage applied on the DM will be  , and the wavefront on-axis will
be
, and the wavefront on-axis will
be  . Taking into account relation
16, it follows that all terms vanish and
the expression is left with r. The TS will measure the wavefront with respect to
its own reference slopes r, which gives r − r = 0,
i.e. a flat, corrected wavefront, in spite of the errors in both the reference slopes and
the DM offset voltages.
. Taking into account relation
16, it follows that all terms vanish and
the expression is left with r. The TS will measure the wavefront with respect to
its own reference slopes r, which gives r − r = 0,
i.e. a flat, corrected wavefront, in spite of the errors in both the reference slopes and
the DM offset voltages.
The success of the on-sky measurement method of all static offsets relies on the fact that Sstatic i and Voffset are estimated from the same set of data. In this case, the error we make is related only to partial convergence of the average of non-tomographic aberrations (unseen layers, drifts in the instrument or telescope, etc) and not to the partial convergence of the average of the turbulence itself.
4. Data reduction
We have PSF images on the target direction (i.e. the central star) taken using the IR camera. In parallel to the IR images, the real-time slopes of all WFSs (off-axis and TS) plus DM voltage data are saved to determine the atmospheric parameters and evaluate the error budget. We record two types of synchronous data for all the WFSs:
-
engaged slopes recorded while the MOAO loop is engaged. It stands for the open loop sensing on the 3 off-axis WFS (used to compute the correction on-axis) and residual slopes seen by the TS.
-
disengaged slopes recorded while the MOAO loop is NOT running. DM is flattened allowing measurements of the turbulence in open loop on each of the 4 NGS WFS directions.
We now present the procedure used to reconstruct different terms in the error budget of CANARY from these data.
4.1. IR image performance estimation
The background is subtracted from the IR images and dead pixels are removed using a pixel map previously established on a dark image. The IR images shown here are simply the average of 30 individual exposures of 1 s (not tip-tilt removed). The IR image was centered in a region of the detector with no dead pixel to avoid any bias in the estimation on the PSF.
Strehl ratios (SR) have been computed on the IR images by normalizing their total energy
to unity, and dividing their peak value by that of the diffraction-limited pattern sampled
identically. This peak value is given by  with o the central obscuration
diameter, and p the camera pixel scale in rd pixel-1. First, we calibrate the pixel
scale using an internal source at λ =1550 nm, and we ensure that the WFS pixel scale
and IR camera pixel scale are consistent together. This is important to ensure that all
absolute WFS-related values (r0, and any nm rms value measured from wavefront data) will
be consistent with the IR camera pixel scale. Then a supplementary calibration has been
done on-sky using a reference double star imaged on the IR camera to determine the final
pixel scale. We close the loop using the TS and measure the Optical Transfert Function
(OTF) of the IR image. From the OTF, we estimate the cut-off frequency at
D/λ and
check the number of pixels in λ/D. The
normalisation of the flux is dramatically sensitive to the estimation of background level
to be subtracted. Special care has been taken with this operation, first narrowing the
field to only 64 × 64 pixels
around the source and then estimating the residual background level using edge pixels. We
estimate the uncertainty on the SR due to normalization errors in the background to be of
the order of 0.02 (2%).
with o the central obscuration
diameter, and p the camera pixel scale in rd pixel-1. First, we calibrate the pixel
scale using an internal source at λ =1550 nm, and we ensure that the WFS pixel scale
and IR camera pixel scale are consistent together. This is important to ensure that all
absolute WFS-related values (r0, and any nm rms value measured from wavefront data) will
be consistent with the IR camera pixel scale. Then a supplementary calibration has been
done on-sky using a reference double star imaged on the IR camera to determine the final
pixel scale. We close the loop using the TS and measure the Optical Transfert Function
(OTF) of the IR image. From the OTF, we estimate the cut-off frequency at
D/λ and
check the number of pixels in λ/D. The
normalisation of the flux is dramatically sensitive to the estimation of background level
to be subtracted. Special care has been taken with this operation, first narrowing the
field to only 64 × 64 pixels
around the source and then estimating the residual background level using edge pixels. We
estimate the uncertainty on the SR due to normalization errors in the background to be of
the order of 0.02 (2%).
4.2. Seeing estimation
The off-axis WFS continuously measure the open-loop turbulence, irrespectively of the loop being engaged, when operating in MOAO or SCAO modes. They can always be used to estimate the Fried parameter r0 at any time. For each of the 3 off-axis WFS, r0 is computed by fitting the theoretical variances of the Zernike decomposition of the Kolmogorov spectrum (Noll 1976) to those of the experimentally reconstructed wave-front. Before fitting, the experimental variances are corrected from the wave-front sensing noise measured on the slopes as explained in Sect. 4.3.4, and propagated onto the Zernike coefficients. The wave-front is reconstructed on Zernike modes from Z2 to Z36, but the fit only takes into account modes 4 to 27. Tip-tilt is excluded, as it may be polluted by the telescope tracking or vibrations, and is definitely influenced by the outer scale L0. We did not observed any significant vibration on the temporal spectra of the higher order modes. Modes 28 to 36 are excluded too, because as they are the last radial order they are more affected by aliasing effects. r0 is given at 500 nm and at the airmass of the observation (not rescaled to zenith). The final r0 estimation seen by CANARY is computed by taking the mean of the estimated r0 from the 3 off-axis WFS measurements.
4.3. CANARY error budget
The estimated wavefront error σErr can be translated in an expected SR
using the formula SR = exp(−(2πσErr/λ)2)
and compared to the SR measured on the IR image. The overall error budget of CANARY is
given for the IR on-axis channel where the images are recorded. The total error budget on
the IR camera, denoted σErrIR, can be expressed as
 (17)and
we will assume in this paper that all these terms are independent, so that variances add
up together. We define now each of the individual terms of the error budget and describe
how we compute them.
(17)and
we will assume in this paper that all these terms are independent, so that variances add
up together. We define now each of the individual terms of the error budget and describe
how we compute them.
4.3.1. NCPA error 
The best SR obtained on-bench, after the NCPA estimation by phase diversity and compensation by the DM, is 0.80 ± 0.02 (≈115 nm rms ). It corresponds to residual NCPA and the high spatial frequencies non correctable by the DM. We call the both contributions as NCPA noted σNCPA. The best flat of the DM is 50 nm rms determined from interferometric measurements measured in May 2009. The poor error figure is explained by high spatial frequencies that developed between actuators due to the aging of the mirror.
4.3.2. Field static aberrations 
In MOAO, the off-axis WFSs and the TS measure, in addition to the atmospheric turbulence, static aberrations across the telescope field of view. For the TS the DM creep is also included in this term. These aberrations mainly come from the telescope and the derotator and may vary across the field. We consider them as quasi static aberrations as they slowly evolve during the night. We calibrate and subtract the field aberrations in the MOAO loop. However, a non-perfect determination of the off-axis static aberrations leads to a residual static error after the MOAO correction in the on-axis direction. Any additional DM creep due to the static term Voffset applied to the DM during open-loop operation can also contribute to this error term. The total on-axis static error noted σFieldStat can be measured by the TS by averaging its slope measurements while the loop is engaged.
This error term is related to the inaccuracies in the calibration of the static offsets, that have already been described in Sect. 3.6.
4.3.3. Fitting error 
The estimation of the DM fitting error σFit (or undermodelling error) has
been determined using a Monte-Carlo simulation. We have computed the residual phase
variance of computer-generated Kolmogorov wave-fronts subtracted from their best
least-squares fit on the DM modes. We have restricted the modes to the 47 actually
controlled by the system, out of the 54 degrees of freedom (52 on the DM, 2 on the
tip-tilt mirror). The 7 filtered modes correspond to a resulting conditioning number of
50. This fitting error was found to be  (18)Then, the fitting
error term of our error budget is a number which will simply be derived from the
knowledge of r0, using the above equation.
(18)Then, the fitting
error term of our error budget is a number which will simply be derived from the
knowledge of r0, using the above equation.
Roddier (1999) gives the fitting error as
function of the number of actuators na in the pupil diameter:
 and
replacing na with
and
replacing na with
 leads to
leads to  (19)which gives
Ntot =
42 in our case when identifying with Eq. (18). This is extremely close to the number
of actuators that are truly laying within the pupil, as depicted on Fig. 4. This latter represents the configuration of the
subapertures within the pupil and of the actuators of CANARY. One can see that a total
of 12 actuators (represented with circles) are poorly seen by the WFS, leading to only
40 actuators in the pupil, a value compatible with Ntot = 42.
(19)which gives
Ntot =
42 in our case when identifying with Eq. (18). This is extremely close to the number
of actuators that are truly laying within the pupil, as depicted on Fig. 4. This latter represents the configuration of the
subapertures within the pupil and of the actuators of CANARY. One can see that a total
of 12 actuators (represented with circles) are poorly seen by the WFS, leading to only
40 actuators in the pupil, a value compatible with Ntot = 42.
 |
Fig. 4 Geometric configuration of the 36 useful sub-apertures of a Shack-Hartmann WFS of CANARY across the WHT pupil (with a 0.286 normalised diameter central obscuration). Actuators within the pupil are represented with a cross. Actuators out of the pupil are also represented with circles. |
Now, we can also compare Eq. (18) with
this one derived by (Conan 1994),  (20)that
gives the fitting error after the correction of the Nz first Zernike
polynomials. We find that our DM amounts to NZ ≈ 38 Zernike
modes.
(20)that
gives the fitting error after the correction of the Nz first Zernike
polynomials. We find that our DM amounts to NZ ≈ 38 Zernike
modes.
In the following sections of this article, we express all error terms in nm rms. They are computed by using a Zernike decomposition of the WFS slopes. We have chosen to consider a wavefront reconstruction on NZ = 36 Zernike polynomials corresponding to radial order n = 7, as this is nearly equivalent to our DM. We define Miz the matrix containing the response of the SH to the Zernike modes 2 to 36, and Mrz the Zernike reconstruction matrix (generalized inverse of the Miz matrix).
4.3.4. Noise error 
We compute the noise  on the WFS slope
signals from their temporal autocorrelation. As noise and turbulence are two independent
processes, the autocorrelation of their sum is the sum of autocorrelations. At
Δt = 0,
in particular, the measured variance is the sum of variances of noise and turbulence.
While the autocorrelation of noise is a Dirac function, that of turbulence is wide and
locally smooth around Δt =
0: this allows us to separate them by fitting a parabola
(a.Δt2 +
b) to the two points of the autocorrelation at
Δt = 1
and Δt = 2
and extrapolating the purely turbulent variance at Δt = 0. This value is
subtracted from the total variance at Δt = 0, to obtain the noise variance on each
slope. The WFS slope noise is then propagated through the Zernike reconstruction matrix
Mrz on 36 modes in
order to be converted into a wavefront error. We compute the propagated noise by making
the assumption that there is no spatial correlation between noise on any of the slopes,
i.e. the covariance matrix of the slope noise is a pure diagonal matrix, noted
on the WFS slope
signals from their temporal autocorrelation. As noise and turbulence are two independent
processes, the autocorrelation of their sum is the sum of autocorrelations. At
Δt = 0,
in particular, the measured variance is the sum of variances of noise and turbulence.
While the autocorrelation of noise is a Dirac function, that of turbulence is wide and
locally smooth around Δt =
0: this allows us to separate them by fitting a parabola
(a.Δt2 +
b) to the two points of the autocorrelation at
Δt = 1
and Δt = 2
and extrapolating the purely turbulent variance at Δt = 0. This value is
subtracted from the total variance at Δt = 0, to obtain the noise variance on each
slope. The WFS slope noise is then propagated through the Zernike reconstruction matrix
Mrz on 36 modes in
order to be converted into a wavefront error. We compute the propagated noise by making
the assumption that there is no spatial correlation between noise on any of the slopes,
i.e. the covariance matrix of the slope noise is a pure diagonal matrix, noted
 . The propagated
noise is then given by
. The propagated
noise is then given by  (21)This equation is used
for the TS noise computation
(21)This equation is used
for the TS noise computation  . The diagonal
terms on the noise matrix depends on the GS magnitude and considered sub-aperture.
. The diagonal
terms on the noise matrix depends on the GS magnitude and considered sub-aperture.
4.3.5. Noise through the tomographic estimator 
This term is computed from noise on the off-axis WFS, computed as described in the
previous paragraph, propagated through the tomographic slopes estimator matrix
Mt, and propagated
through the Zernike reconstruction matrix Mrz:
 (22)This white
noise is filtered by the temporal controller (see Sect. 3.4, Eq. (13)), and only a
fraction of it is actually injected in the DM command. The reduction of the noise
variance due to the low-pass filtering is given by a factor of
(22)This white
noise is filtered by the temporal controller (see Sect. 3.4, Eq. (13)), and only a
fraction of it is actually injected in the DM command. The reduction of the noise
variance due to the low-pass filtering is given by a factor of
 (demonstrated in Appendix A), where g is the loop gain:
(demonstrated in Appendix A), where g is the loop gain:  (23)
(23)
4.3.6. Bandwidth error 
The bandwidth error is computed using a set of recorded engaged-loop WFS data using the off-axis WFS with the highest signal-to-noise ratio (in open loop). The principle is to numerically filter this real data set in order to reproduce frame-by-frame the loop behaviour in engaged mode, then derive the error from the simulated residuals. The method ensures the computation of a bandwidth error term that corresponds to the precise recorded turbulence conditions.
A first step computes the open loop controller filtering (see Sect. 3.4) of the slope measurements:  (24)Then a second step
simulates the application of the DM command, which acts as a zero-order hold, and that
occurs partly during the integration of the subsequent frame t + 1, and partly during
the frame after that at t +
2. Writing the fractional delay, expressed in frames, as
(1 + α),
with 0 ≤
α< 1, then the residual
signal Rt is
(24)Then a second step
simulates the application of the DM command, which acts as a zero-order hold, and that
occurs partly during the integration of the subsequent frame t + 1, and partly during
the frame after that at t +
2. Writing the fractional delay, expressed in frames, as
(1 + α),
with 0 ≤
α< 1, then the residual
signal Rt is  (25)and the variance of
this last signal Rt characterizes
the bandwidth error, except it just needs to be unbiased from noise.
(25)and the variance of
this last signal Rt characterizes
the bandwidth error, except it just needs to be unbiased from noise.
As the on-sky data St unavoidably includes noise, we need to correct the variance of Rt from the noise variance that has propagated through our filtering process, since we aim to compute here the bandwidth error associated only with turbulence (the impact of noise has been treated in 4.3.5). It is demonstrated in Appendix A that a pure white noise of unitary variance, filtered as described in Eqs. (24) and (25) is output with a variance given by (1−2gα(1 − α))g/ (2 − g).
Finally, to express the bandwidth error as a wavefront error, we reconstruct the measurements Rt in a Zernike basis using the matrix Mrz, and we compute the variance of each Zernike coefficient. The noise variance on each slope is also propagated on the Zernike coefficients as described in Eq. (21), the factor (1−2gα(1 − α))g/ (2 − g) is applied on each, and the result is subtracted from the variance of Rt. The BW error term also includes the vibration error term since the integrator controller does not efficiently reject the vibrations. The vibration term in CANARY has been studied in Kulcsàr et al. (2012). We measured Tip-Tilt vibration peaks between 20 Hz and 50 Hz and of the order of 100 nm rms for the night of the 27th of September.
4.3.7. Aliasing error 
Aliasing is due to the fact that the WFS spatially samples the wavefront across the
pupil of the instrument. The high spatial frequencies of the wavefront disturbances will
be undersampled if they are higher than the Nyquist frequency (i.e. higher than the half
of the sampling frequency). Thereby, these high frequencies are mistaken for low spatial
ones. Another way to say it is that the incoming wavefront φ does not entirely lie
within the mirror subspace, it contains a component φ⊥ orthogonal
to it (thus giving rise to the fitting error). This orthogonal wavefront is seen by the
wavefront sensor but unfortunately produces non-zero measurements that will be
reconstructed and mistaken by the system as mirror modes. Quirós-Pacheco et al. (2010) has given an extensive analysis of
aliasing in tomographic applications, and we do not aim to do the same here. We will use
a simplified, approximate approach to disentangle the different aliasing effects on the
system. As already stated in Sect. 4.3 our main
assumption is a negligible coupling between the terms of the error budget, in particular
 with
with
 and
and
 .
.
First, we compute the covariance matrix of the turbulence on the Zernike basis
Czz with 900
polynomials (which we assume to be large enough to represent an infinite number)
normalized to D/r0 =
1 using the formulae given by Noll
(1976). Then, we zero the lines and rows corresponding to the first modes up to
Z36 in order to obtain a covariance
matrix of the turbulence Czz ⊥ only of high
orders (of φ⊥, as named above). This matrix is
supposed to mimic the statistics of the phase orthogonal to the DM space. We then
compute the slopes covariance matrix of this high-order turbulence, noted
Css, using a transformation matrix from
Zernike to slopes Miz 900, computed
here for the first 900 Zernike polynomials:
 (26)The matrix
Css represents the statistics of the
aliased wavefront on the WFS. We finally use the Zernike reconstruction matrix
Mrz on the
Css slopes covariances matrix to compute
the aliasing error,
(26)The matrix
Css represents the statistics of the
aliased wavefront on the WFS. We finally use the Zernike reconstruction matrix
Mrz on the
Css slopes covariances matrix to compute
the aliasing error,  (27)and we should now
evaluate how the aliasing will propagate through the control. For this, we consider the
aliasing effect differently depending on whether layers are placed in altitude or at the
ground.
(27)and we should now
evaluate how the aliasing will propagate through the control. For this, we consider the
aliasing effect differently depending on whether layers are placed in altitude or at the
ground.
We assume that aliasing produced by layers located close to ground level is fully
correlated between all the WFSs including the TS. This aliasing error is injected into
the loop and is consequently fully applied to the wavefront by the DM. This introduces
an error on the IR camera that is not seen on the TS slopes in first approximation. We
compute its effects as a fraction XGround of the total turbulence on the
telescope:  (28)Contrarily to ground,
we assume the aliasing produced in altitude behaves as a white spatial noise, not
correlated between the off-axis WFSs. We consider to be a noise contribution by
averaging on the WFSs,
(28)Contrarily to ground,
we assume the aliasing produced in altitude behaves as a white spatial noise, not
correlated between the off-axis WFSs. We consider to be a noise contribution by
averaging on the WFSs,  (29)where
XAltitude is the fraction of the
turbulence which is not at the ground and nWFS = 3 the number of WFSs. Using the
last two equations, we neglect the impact of the open loop filtering on the aliasing
terms. Finally, the aliasing in altitude, produced only by the TS, is computed by
(29)where
XAltitude is the fraction of the
turbulence which is not at the ground and nWFS = 3 the number of WFSs. Using the
last two equations, we neglect the impact of the open loop filtering on the aliasing
terms. Finally, the aliasing in altitude, produced only by the TS, is computed by
 (30)
(30)
4.3.8. Tomographic error 
We compute the tomographic error on a given data set by estimating the residuals between the non-engaged measurements of the TS and the synchronous tomographic prediction. We also have to unbias the tomographic error from several additional effects, that we detail in Eq. (33). This latter is computed by multiplying the off-axis slopes SoffAxis of the set with the tomographic estimator Mt.
When we are dealing with engaged-loop data, we do not have any non-engaged measurements
of the TS. Our first attempt for retrieving non-engaged TS data was to subtract the
contribution of the DM (with a proper multiplication with the interaction matrix
Mi, Sect. 3.1). This approach is incorrect, because it will
include the DM open-loop error that cannot be disentangled from a tomographic error. We
therefore decided to instead use a set of slopes taken with the loop
disengaged, just before or after the engaged-loop set, to determine
the tomographic error of the latter. This method works provided the value of
is properly
rescaled with respect to the r0 value. A factor of
 has to be applied to the variance.
has to be applied to the variance.
We then estimated the raw tomographic error by computing the difference between this
tomographic prediction and the real measurements made by the TS without introducing any
delay for each frame. We express the vector of the residuals onto a Zernike basis:
 (31)The reference slopes
are already subtracted from Soffaxis and
STS as described in Sect.
3.2. Then the raw tomographic error
(31)The reference slopes
are already subtracted from Soffaxis and
STS as described in Sect.
3.2. Then the raw tomographic error
 is simply given
by the sum of the variances of Zernike coefficients:
is simply given
by the sum of the variances of Zernike coefficients:
 (32)As we compare
perfectly synchronised disengaged slopes data, we have a direct access to the
tomographic error with no temporal effect from the loop filter. However, it still needs
to be corrected from the impact of noise and aliasing. We remove the TS noise
and the
propagated noise from the off-axis WFSs
(32)As we compare
perfectly synchronised disengaged slopes data, we have a direct access to the
tomographic error with no temporal effect from the loop filter. However, it still needs
to be corrected from the impact of noise and aliasing. We remove the TS noise
and the
propagated noise from the off-axis WFSs  . For aliasing, we
remove the contribution of the aliasing effect in altitude on the TS
. For aliasing, we
remove the contribution of the aliasing effect in altitude on the TS
 and propagated
from the off-axis WFSs
and propagated
from the off-axis WFSs  . It follows that,
provided disengaged slopes, the pure tomographic error
can be estimated
from
. It follows that,
provided disengaged slopes, the pure tomographic error
can be estimated
from  (33)We
emphasize that the on-sky measured term could itself be
split into different terms, in particular the error term
(33)We
emphasize that the on-sky measured term could itself be
split into different terms, in particular the error term
 of the turbulence
profile model, corresponding to an error made on the model used to build the
reconstructor. We can have an estimation of this model error by comparing the
, evaluated on-sky
with the tomographic error evaluated with a numerical simulation using a
profile strictly equal to
the model that served to compute the estimator Mt. We give an example
of such a comparison in the last section of this paper.
of the turbulence
profile model, corresponding to an error made on the model used to build the
reconstructor. We can have an estimation of this model error by comparing the
, evaluated on-sky
with the tomographic error evaluated with a numerical simulation using a
profile strictly equal to
the model that served to compute the estimator Mt. We give an example
of such a comparison in the last section of this paper.
4.3.9. Open loop error 
This term has also been named “go-to” error in the literature, and corresponds to the
fact that the shape the mirror will take for a given set of voltages is not exactly the
one that one would expect, due to hysteresis, drifts, non-linearities or any other
effect that has not been taken into account in the mirror model. We also underline that
in our analysis, the term  only represents
the dynamic wave-front error linked to the open loop behavior of CANARY DM. The static
wave-front error term is given by
only represents
the dynamic wave-front error linked to the open loop behavior of CANARY DM. The static
wave-front error term is given by  .
.
As stated in paragraph 4.3.8, the dynamic open
loop error is difficult to disentangle from the tomographic error. We decide to estimate
it from the engaged slopes where we can measure the residual wavefront
error seen by the TS, denoted hereafter as σFieErrTS. The error seen by the TS
can be computed as a sum of the individual terms:  (34)Considering
that we measure
(34)Considering
that we measure  ,
is the last
unknown in Eq. (34). It can be estimated
by
,
is the last
unknown in Eq. (34). It can be estimated
by  (35)Engaged
slopes are therefore required to compute an estimation of the open loop error
and also disengaged slopes because an estimation of the
term is needed.
Because our estimation is computed by subtracting a large number of estimated terms from
,
may also include
all the estimation errors (finite number of slope samples, approximations, bad
calibration, etc.). Therefore, it is only a crude estimation of
.
(35)Engaged
slopes are therefore required to compute an estimation of the open loop error
and also disengaged slopes because an estimation of the
term is needed.
Because our estimation is computed by subtracting a large number of estimated terms from
,
may also include
all the estimation errors (finite number of slope samples, approximations, bad
calibration, etc.). Therefore, it is only a crude estimation of
.
5. On-sky results
We had 2 × 4 nights split between September (19th, 22nd, 26th and 27th) and November 2010 (from 23rd to the 26th). Unfortunately due to bad weather we lost most of the November nights. We focus in this paper on the results obtained on the fourth night of the September run (2010 Sep. 27th). We alternated the observations between the SCAO (closed loop on the TS), GLAO and MOAO modes as the turbulence profile evolved and as we changed asterisms. During the whole night, the sampling frequency of all WFSs was 150 Hz irrespective of the AO mode. Although the temporal controllers are slightly different between open and closed loop, the RTC latency is the same for all modes.
5.1. Natural guide stars asterisms
CANARY makes use of star asterisms formed by four NGSs. The central one, placed on-axis and used for diagnostic purposes, mimics the science object that will benefit from the turbulence compensation. We selected asterisms with a distance between the central on-axis star and the three off-axis ones ranging from 15″ to 65″, while keeping all stars brighter than mV = 12. The three observed asterisms of the 54 identified asterisms for the September period are described in Table 1 and Fig. 5.
Three asterisms observed during the night of the 27th of September 2010.
 |
Fig. 5 Map of the 3 asterisms (DSS images) observed during the September run. The tomographic estimator was computed using the 3 off-axis stars and applied in the central direction (white arrows). The dashed circle represents a 2′ diameter field of view. |
5.2. CANARY tomographic altitude resolution
The maximum spatial frequency measured by a WFS is defined by
 with dssp the size of the sub-aperture
projected on-sky (dssp = 0.6m for CANARY). For that
frequency, the tomographic altitude resolution Δh, is computed with the relation
with dssp the size of the sub-aperture
projected on-sky (dssp = 0.6m for CANARY). For that
frequency, the tomographic altitude resolution Δh, is computed with the relation
 , with
α the
separation angle between 2 WFSs. The maximum altitude accessible hmax is given by
the relation
, with
α the
separation angle between 2 WFSs. The maximum altitude accessible hmax is given by
the relation  . A large
separation angle will allow us to take advantage of a good altitude resolution, while
small separations give access to a higher sensing altitude.
. A large
separation angle will allow us to take advantage of a good altitude resolution, while
small separations give access to a higher sensing altitude.
Because CANARY is equipped with 4 WFSs, each senses the wavefront in a different direction according to the NGS configuration (i.e. the observed asterism). This leads to different tomographic resolutions according to the considered pairs of WFSs. Table 2 summarizes the altitude resolution for each baseline of each asterism. During the night, the altitude resolution was in the range 1000 to 4000 m. The best resolution of Δh = 1083 m is achieved with the pairs of WFS 1 and 2 on asterism A53. It also means that we were more sensitive to a variation of a layer altitude on asterism 53 than asterisms A47 and A12. Because of the very large shift in altitude any layer above 7500 m cannot be seen by this particular pair of WFS but was completed by the measurement of narrower pairs like WFS 2 and 3 that allowed us to sense the turbulence profile up to 14 000 m.
Vertical altitude resolution and maximum altitude in metres computed for each pairs of the 4 WFSs.
The following sections present the evolution of the seeing conditions, the SR measured on the IR camera, the turbulence profile, the tomographic error, the open loop error and the residual field aberrations during the night of September 27th. Section 6 presents a detailed analysis of the error budget for three different cases during the night.
5.3. Seeing conditions
Figure 6 plots the r0 estimated from off-axis WFS data (unbiased from noise and aliasing, see Sect. 4.2) versus the local time (in hours, negative before midnight). The r0 value is not rescaled to zenith. Dashed lines represent the asterism change during the night. Asterism A47 was observed from the beginning of the night to 02h00m local time, A53 from 02h00m to 05h00m and A12 from 05h00m to the end of the night. The median value is r0 = 11.33 cm giving a median seeing of 0.91″ at 500 nm. Worst and best seeing were respectively 1.23″ and 0.63″.
 |
Fig. 6 r0(cm) at 500 nm from WFS data versus local time (hour) during the night of the 27th September 2010. Dashed lines separate asterisms. |
5.4. IR camera images
Figure 7 shows an example of IR image comparison at λ = 1530 nm for the three AO modes tested on CANARY plus a seeing limited image. The four images of 30 s exposure each were taken respectively at 00h59m18s (Seeing), 00h42m10s (GLAO), 00h29m22s (MOAO) and 00h32m28s (SCAO). Measured SR are respectively, 1%, 5.3%, 19.4% and 23.8%. As already underlined by Gendron et al. (2011), the MOAO performance is close to the SCAO one. In particular, despite the strong ground layer observed during the night, we see that MOAO performs much better than GLAO. The following subsections will give more insights into this result.
 |
Fig. 7 IR image comparison at λ = 1530 nm. The four images of 30 s exposure each were taken at 00h59m18s (Seeing), 00h42m10s (GLAO), 00h29m22s (MOAO) and 00h32m28s (SCAO). Measured SR are respectively: 1%, 9%, 19.4% and 23.8%. |
5.5. Turbulence profile
During our observations, the retrieval step (i.e. the Learn
phase of the L&A algorithm), was limited for practical software reasons
(computation time) to only three fitted layers. Since September 2010, we have
significantly improved the computation speed of the Learn step (see Martin et al. 2012). On-sky, we were jointly fitting, at the same time,
the strengths and altitudes of 3 layers and the 4 WFS on-sky positions (observing
directions). With the new fitting procedure we now employ a series of altitudes
hi, regularly spaced by
Δh, ranging from ground to hmax (see Sect.
5.2) and fit only their strength value
 . The positions of the WFS are
measured by the target acquisition system encoders in the focal plane of the telescope.
The fit is now more robust and thanks to an increase in speed, we are now able to fit up
to 15−20 layers in a few tens
of seconds.
. The positions of the WFS are
measured by the target acquisition system encoders in the focal plane of the telescope.
The fit is now more robust and thanks to an increase in speed, we are now able to fit up
to 15−20 layers in a few tens
of seconds.
Post-processing the Phase A on-sky data allows us to retrieve detailed
profiles with up to 15 layers
measured between 0 and 20 km (depending on the asterism geometry). We have selected one
disengaged slopes data set per asterism to illustrate the
identification of the turbulence profile and the estimation of the error budget. Table
3 summarises the parameters of these synchronised
data sets taken at 23h59m (using 28 000 frames, acquisition time of
3h06m), 3h14m (58 000 frames) and 6h02m (28 000 frames)
on asterisms A#47, A#53 and A#12, respectively. Figures 8−10 present the measured during the on-sky
observations (left) and post-processed (right) using these sets of disengaged
slopes. The turbulence profiles have not been rescaled by the airmass to
maintain the profile as it was observed in the line of sight of CANARY.
Three disengaged data sets for the three asterisms and the corresponding tomographic error computed with a ground layer, 3 or 15 layer tomographic estimator (in nm rms).
 |
Fig. 8
|
 |
Fig. 9
|
 |
Fig. 10
|
At 23h59m (Fig. 8), we measured more than 95% of the turbulence below 1340 m (best resolution achievable on asterism A#47, see also Table 2) during the on-sky operations. A weak layer of 5% was also detected at ≈3000 m. After post processing the data with a higher vertical resolution sampling, we measured the ground layer contribution at 91% and one high layer at ≈13 500 m of 9% (right). On the 3h14m dataset (Fig. 9), we measured during the observations a ground layer contribution at 77% (74% post processed), a 14% layer contribution at 1080 m (11% post processed) and 1 layer at 10% at ≈4000 m (spread into 3 layers of 10% contribution with the new 15 layer profile). We additionally measured with the post processing 3 very weak layers around 11 km (few percent) which was not measured and taken into account on-sky. At 6h02m (Fig. 10), we measured on-sky 85% in the ground layer contribution (82% post processed) and one layer at ≈2000 m of 15% (13% at 1490 m + 3 small layers at ≈15 km of a total contribution of 5% with post-processing). We can see on these plots that even with only three fitted layers we were able to account for most of the turbulence distribution in our computed estimators. But it is also clear that we have a significant model error in our results because of the missing high altitude layers in the estimators. We will quantify this error in Sect. 6.
5.6. Tomographic error
Figure 11 shows the tomographic error versus the local time. We used here sets of disengaged slopes to compute the tomographic error (see Eq. (33)). The graph plots the tomographic error for GLAO cases (crosses) and MOAO cases (L&A with 3 reconstructed layers: circles). At any time, the L&A reconstruction performs better than the GLAO reconstructor. The median tomographic error for all data taken over the night gives σtomoMOAO = 216 nm rms for MOAO while the GLAO reconstruction gives σtomoGLAO = 270 nm rms. On average throughout the night, MOAO reconstruction performed 160 nm rms better than the GLAO case. Most of the fluctuations in the tomographic error observed in Fig. 11 are due to the large fluctuations in the seeing conditions during the night.
 |
Fig. 11 Tomographic error (nm rms) measured using disengaged slopes versus local time (hour). Asterisms A47, A53 and A12 are respectively represented with squares, circles and triangles. For each asterism we plot the MOAO and GLAO reconstruction respectively represented in plain and blank points. |
 |
Fig. 12 Tomographic error measured with MOAO and GLAO estimator versus r0(cm): same points and
symbols as in Fig. 11. Dashed lines represent a fit to each dataset by a law
∝ |

Figure 12 plots the tomographic error as function
of r0 value. We superimpose the expected
 law showing the overall behavior of this error term. This trend is globally verified by
our estimates of this error. One can see the improvement of the L&A tomographic
reconstruction versus the GLAO mode. The large scatter of the MOAO results is due to the
large number of configurations tested during the night. Many MOAO datasets were taken when
system parameters were not optimal and the observing conditions were also evolving.
law showing the overall behavior of this error term. This trend is globally verified by
our estimates of this error. One can see the improvement of the L&A tomographic
reconstruction versus the GLAO mode. The large scatter of the MOAO results is due to the
large number of configurations tested during the night. Many MOAO datasets were taken when
system parameters were not optimal and the observing conditions were also evolving.
Figures 13 represent the statistics of Zernike
expansion coefficients on the data set of disengaged slopes at 03h14. We
compute the Zernike expansion of the uncorrected turbulence (black/diamonds), the GLAO
reconstruction (black/square) MOAO correction with 3 reconstructed layers (black/circle)
and 15 reconstructed layers (empty/cross), The uncorrected wavefront error is measured at
a level of 1139 nm rms. As expected, we recognise the Zernike expansion sorted by radial
orders (order 1 with tip and tilt, order 2 containing the defocus and the two
astigmatisms, etc). The GLAO reconstruction gives a tomographic error of 314 nm rms while
the optimized MOAO reconstruction with 3 layers gives 229 nm rms (with the MOAO estimator
used on-sky). We also use the optimized 15 layers measured a posteriori (see Fig.
9) to compute a 15 layer tomographic estimator,
apply it to the off-axis data and compare the prediction to the real measurements made
on-axis by the TS. The post-processed estimator increases performance by reducing the
model error, resulting in a wavefront error of 213 nm rms. Figure 14 illustrates the quadratic difference between the GLAO and MOAO
reconstruction with 3 layers (black/triangles) as function of the Zernike number. One
clearly sees the improvement for all modes using the MOAO reconstructor with 3 layers
(tomographic error reduced by 215 nm rms). Similarly Fig. 14 illustrates the quadratic difference between the MOAO reconstruction with 3
layers (black/circles) and MOAO reconstruction with 15 layers (black/triangles). For this
dataset the total improvement by reconstructing 15 layers instead of 3 could be reduced by
84 nm rms.
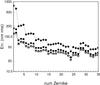 |
Fig. 13 Zernike expansion coefficient root mean square (log scale) of uncorrected wavefront (black/diamond), tomographic reconstruction with GLAO (black/square) MOAO correction with 3 reconstructed layers (black/circle) and 15 reconstructed layers (cross), for the disengaged slopes dataset of 3h14m. |
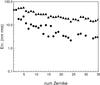 |
Fig. 14 Quadratic difference between the GLAO and 3 layer MOAO reconstruction (triangles) as a function of the Zernike number using the same dataset as Fig. 13. The 3 layer reconstruction improves the tomographic reconstruction by 215nm rms in total. The quadratic difference between the 3 layer and 15 layer MOAO reconstruction is illustrated with circles. The 15 layers reconstruction allows us to reduce the tomographic error by 84 nm rms. |
Table 3 summarizes all the numbers for 3 data sets of disengaged slopes respectively at 23h59, 3h14, and 6h02 and highlights the quadratic differences between error terms. It shows that the 15 layer profile increases the performance of the tomographic reconstruction compared to the 3 layer reconstruction by an amount ranging between 80 and 60 nm rms. This comparison reveals the impact of the model error in the tomography error term, even in our observing conditions with a dominant ground layer. Correcting with the 3 layer estimator brings an improvement of 164, 215 and 173 nm rms over the GLAO estimator for the three data sets.
5.7. Open loop error
Open loop error is represented as a function of r0 in Fig. 15. Open loop error estimation requires engaged slopes to be processed with disengaged slopes taken together within a short time scale. Only 16 sets of data are available with engaged and disengaged slopes close enough (in time) to compute a valuable error budget during the night. We estimate that open loop error ranged between 160 and 50 nm rms during the night. Because of the method used to estimate this error (computed from the quadratic difference of numerous estimated error terms), we cannot reliably draw conclusions about the behavior with respect to r0.
The open-loop error (or go-to error) was measured on the bench as typically lower than 5% of the total corrected wavefront (Kellerer et al. 2012). For the three data sets of Table 3 this gives an error lower than 35 nm rms.
 |
Fig. 15 Openloop error versus r0. |
 |
Fig. 16 Wavefront error (in nm rms) due to static aberrations when measured in SCAO (triangles) and MOAO (circles) configurations versus local time. |
5.8. Field static aberration error
The measured field (quasi-static) aberrations versus the local time is presented in Fig. 16. Residual static aberrations are very small ≈10 nm rms in the SCAO case (triangles). This value can be explained by the larger number of degrees of freedom measured by the TS than the number really controlled by the DM. The measured field aberrations in MOAO (circles) is 110 nm rms averaged over all the night. This value is quite large compared to other error terms and should not be underestimated while designing an MOAO instrument. Within this value, we estimated the order of magnitude of the contribution of the DM creep to be around 60nm rms. It also shows that MOAO requires a regular update of these field aberrations either by calibrating them on-sky (CANARY scheme) or by computing them using a model of the telescope aberrations.
6. Error budget comparison
In this section we present the error budget computed on-sky at 3 different times during the night, each made on a different asterism in order to characterize the performance on 3 different geometrical and atmospherical conditions. Each case requires both a disengaged and a sequential engaged data set, in order to be able to perform the full error budget. The 3 disengaged sets are the ones presented in Table 3 and described in the previous section. The hours for the different data sets are:
| Asterism | Disengaged | Engaged |
|
|
||
| A#47 | 23h59m | 0h10m |
| A#53 | 3h14m | 3h24m |
| A#12 | 6h02m | 6h07m |
In order to compare to the on-sky results, we also perform three numerical simulations for the same conditions and we compute the corresponding error budget and IR images. We present the simulation parameters in the next section.
Simulations parameters.
6.1. Simulation parameters
We used the end to end adaptive optics simulation program called Yorick Adaptive Optics (YAO) written by (Rigaut 2011) to produce series of engaged and disengaged data sets of slopes for each of the 4 WFS (including TS). These data sets mimic the data that were acquired on-sky with CANARY. The YAO code was modified to perform a simulated MOAO correction, in particular using the tomographic estimator Mct (see Sect. 3.3) and the open loop integrator scheme as described in Sect. 3.4. Finally, the 2 sets of data (engaged and disengaged slopes) produced by YAO are used as inputs to our on-sky data reduction software. We emphasize that we used the same data pipeline software to compute both the on-sky error budget and the simulated error budget in order to avoid any bias in the data reduction.
YAO is able to simulate a multi-layer turbulence profile by generating independent phase
screens for each layer. We have chosen the 15-layer profile deduced from the
post-processed on-sky data (see Figs. 8−10) as the simulated
. Simulated WFS positions in the
field of view are the ones deduced from the measurement made during the on-sky
observations by WFS position encoders within the target acquisition system.
We simulate the on-sky WFS configuration with 7 × 7 sub-apertures and 16 × 16 pixels per sub-aperture. The centroids of spots are computed with the same centroiding method as that used on-sky, i.e. selecting the 10 brightest pixels in a sub-aperture and zeroing the others. The magnitudes of the guide stars are adjusted to match with the WFS noise variance measured directly from the on-sky data. The variance of the noise on the simulation dataset is therefore identical to the real noise encountered on-sky, with both measured as described in 4.3.4.
The sampling frequency is simulated at 150 Hz. In order to simulate a loop latency of 1.5 frames, we ran two numerical simulations to compute the bandwidth error at 1 and 2 frames delay (YAO only simulates latencies of an integer number of frames) and linearly interpolated the bandwidth error at 1.5 frames. We simulated 7000 iterations (≈45 s at 150 Hz) to produce typical data sets on all the WFS. The estimation of the average wind speed was deduced from the on-sky datasets by measuring the FWHM of the temporal autocorrelation of disengaged slopes data, and we reproduced the same in the simulation by tuning the speed. The simulated wind speeds were set respectively to 6, 6 and 8 m s-1 as measured from the datasets at 0h10m, 3h24m and 6h07m. The loop gain is respectively set to 0.8, 0.6, and 0.6 corresponding to the values used in these 3 sets. The wind speed is kept the same for all the layers in the simulation. Other parameters of the simulation are identical to the CANARY configuration used on-sky (see Sect. 2) and they are summarized in Table 4.
6.2. On-sky error budget
In this section we discuss the on-sky error budget computed from engaged slopes listed at the beginning of Sect. 6. We recall that the engaged slopes are used to compute, r0, σErrTS, σtomo Noise, σAliasAlt, σAliasGround, σAliasAltTS, σBW, σnoiseTS, σFit, and σField_stat. The important term σTomo is missing to this list: we need sets of disengaged slopes recorded a few minutes before the engaged ones to determine it (using Eq. (33)) and we then rescale it according to the r0 value found on the disengaged set. Then we use Eq. (35) to estimate the open loop term σOL. Finally we estimate the overall error budget σErrIR on the IR camera using Eq. (17). IR images (30 s exposure) were also recorded at a time very close to the engaged slopes. Results are presented in columns labelled on-sky in Table 5 and split in three parts, each for their respective couple of data sets of engaged and disengaged slopes.
Error budget (in nm rms).
-
The tomographic error (including the turbulence model error) is estimated on-sky at σTomo = 156, 219 and 188 nm rms respectively on asterisms A47, A53 and A12. Those 3 values are those already given in Table 3, but now rescaled with the
 of the engaged sets. We recall they were computed using the 3-layer tomographic
estimator used on-sky (Figs. 8−10 on the left for the corresponding profiles).
of the engaged sets. We recall they were computed using the 3-layer tomographic
estimator used on-sky (Figs. 8−10 on the left for the corresponding profiles). -
The estimated open loop error (σOL) ranges between 55 and 140 nm rms. This error term also includes all the other error terms not identified in the error budget.
-
Noise propagated through the estimator (σTomoNoiseFilt, Eq. (23)) ranges between 48 and 97 nm rms. In spite of the large noise terms measured on the individual WFSs (up to 328 nm rms, see Table 4), the noise actually injected in the loop is still one of the weakest error terms. This is explained firstly because we take advantage of multiple wavefront sensing directions allowing the averaging of the noise on the 3 off-axis directions. Secondly, the tomographic estimator takes into account the average noise variance in each sub-aperture (diagonal of the covariance matrix COffOff) and consequently deals optimally with a noisy WFS. Finally we use a temporal controller to filter part of the noise out.
-
We estimate the aliasing contribution at the ground (σAliasGround) at 83 to 132 nm rms, and in altitude (σAliasAlt) at 15 to 28 nm rms. Because of the predominance of the turbulence at ground level in the
 profile
(never less than 75%), the ground layer contribution to the aliasing dominates.
profile
(never less than 75%), the ground layer contribution to the aliasing dominates. -
The measured on-sky bandwidth error lies from 115 to 142 nm rms. The bandwidth error is the highest in A53 in particular because the loop gain was set only to 0.6 instead of 0.8 for the other cases, and the seeing was the worst.
-
We estimate the fitting error at 138, 206 and 165 nm rms which makes it the second largest contributor to the error on CANARY after the tomography.
-
We observe a non negligible contribution (between 77 and 106 nm rms) of the field static aberrations to the error budget even when using our dedicated calibration procedure to extract such a term from the measurements. This contribution may come from the DM creeping effect and from the evolution of the field aberrations during the observations through field derotation or telescope flexures.
-
Best SR errors were measured on the bench with the calibration sources at 115 nm rms and were considered as fixed during the night of observation (see Sect. 4.3.1).
Finally, the estimated total error budget for the IR camera (σErrIR) gives
297, 419 and 357 nm rms. Converting these to Strehl ratio using the approximate formula
 (36)at λ = 1530 nm, we find the
estimated SR: 22.6%, 5.2% and 11.7%. Real IR images were recorded a few tens of seconds
from the dataset of slopes. We measure on these images SR of 20.1%, 10.3% and 16.4%
(±2%) respectively. The
observed discrepancy is mainly due to the pessimistic estimation of the SR using the
exponential formula from the error budget. This formula gives much better estimation when
SR is higher, typically larger than 30%. We will come back to this point after the
presentation of the simulated error budget.
(36)at λ = 1530 nm, we find the
estimated SR: 22.6%, 5.2% and 11.7%. Real IR images were recorded a few tens of seconds
from the dataset of slopes. We measure on these images SR of 20.1%, 10.3% and 16.4%
(±2%) respectively. The
observed discrepancy is mainly due to the pessimistic estimation of the SR using the
exponential formula from the error budget. This formula gives much better estimation when
SR is higher, typically larger than 30%. We will come back to this point after the
presentation of the simulated error budget.
Tomographic error measured from numerical simulations (in nm rms).
6.3. Simulated error budget
In this section we discuss the simulated error budget (columns simul in Table 5).
-
We computed a 3-layer tomographic estimator, directly using the parameters of the simulation. The tomographic error found while using it is σTomo = 161, 220 and 201 nm rms. These values are in good agreement with the on-sky results 156, 219 and 188 nm rms. We recall that although the estimator is based on 3 layers, we introduced a 15 layers
profile in the simulated model of the atmosphere. Therefore in this particular case
a representative tomographic model error was simulated. Table 6 compares the performance of the 3-layer to the 15-layer
estimator within the numerical simulation. The performance when correcting 15 layers
gives 128, 161 and 157 nm rms, a significant reduction of the error. As the
reconstructed profile perfectly matches the simulated one, it represents the pure
tomographic error σPureTomo without any turbulence
profile modelling error contribution (σModel). The latter can be deduced
by quadratically subtracting the tomographic performance of 15-layer estimator from
the 3-layer one. This gives an estimation of the turbulence modeling error of
σModel =
99, 150, 126 nm rms. These numbers can be directly compared with
those in Table 3, where we performed the same
analysis with two estimators based on 3 or 15 layers, but with the on-sky data. The
error σModel is roughly a factor of 2
higher in the simulation which means we are only able with the simulation to
estimate the order of magnitude of the model error that impact our observational
results. In any case, identifying only three layers to compute the estimator was
clearly not sufficient and leads to around 120 nm of additional error. This
significant contribution to the error budget underlines the requirement to increase
the number of layers to be considered in the
profile. -
The simulated noise injected in the loop σTomoNoiseFilt is respectively 78, 79 and 156 nm rms. Notice here that we reproduced the same amount of noise per WFS in the slope measurements with respect to the one measured on-sky. Nevertheless, the noise propagated by the tomographic estimator is higher in simulations than on-sky. This difference is explained by the way the tomographic estimator was computed in the simulations. We did not include the slopes noise variance in the diagonal of the COffOff covariance matrix to compute the tomographic estimator. Therefore the simulated tomographic estimator fully propagates the noise, even though the noise is partially filtered by the integrator loop.
-
For the bandwidth error, we find σBW = 101, 162 and 145 nm rms with the considered conditions. The σBW computed by simulation is close to the on-sky values.
-
As we use an analytical expression based on the value of r0 to derive both the aliasing and fitting error terms, we have reported the same number in the on-sky and simulations cases.
-
Open loop error, NCPA and field static aberrations errors were not simulated.
The total error expected on the IR image σErrIR from the simulated set of slopes is 265, 376 and 347 nm rms. The expected SR from the simulated slopes is therefore 30.6%, 9.1% and 13.1% and must be compared to the SR measured on the simulated IR image which gives: 33.3%, 16.5% and 18.4%. Here the global performance is better because some of the on-sky contributors were not considered in the simulation.
6.4. Relative error budget
Figure 17 shows the on-sky relative error budget (in %) computed by the quadratic sum of the individual error terms presented in Table 5.
-
The fitting error counts for less than a quarter of the total error budget. This error is irreducible in CANARY as it is fixed by the number of actuators on the DM.
-
The tomographic error is the dominant term and its relative value remains remarkably stable at ≈27% of the total error. This is the level of performance we expected from the initial simulations. Despite the change of guide star configuration and magnitudes, the estimator performs relatively well.
conditions were mainly
dominated by a strong ground layer but MOAO provides better performance than GLAO.
This demonstrates the robustness of our tomographic approach based on L&A.
We emphasize again that because it is an on-sky measured term, it also includes the
turbulence profile model error. -
The next largest term in weight is the bandwidth error. It ranges between 11.5% and 15%. It is significantly larger than the noise contributor, showing that a higher sampling frequency could have been used.
-
Noise injected in the loop contributes only a few percent of the total error (≈2 to 7%) despite quite a large noise level in the individual WFS measurements (see Table 4).
-
The open loop term, also containing other unknown errors, ranges from ≈3 to 11% of the total error. This term is at the level of the other contributors listed below. This a satisfactory demonstration that open loop operation works.
-
The aliasing relative contribution ranges between 6 and 10% of the total error.
-
The NCPA has a fixed value of 115 nm rms but its relative value evolves from 7.5% (strongest turbulence) to 14.7% (weakest turbulence).
-
The field static aberrations lead to a 4 to 6% relative error. This term was not expected at the beginning to have such a large contribution. It is clear that it will have to be properly mitigated in any MOAO system.
 |
Fig. 17 Relative representation of the CANARY error budget at 0h10m, 3h24m and 6h07m. Areas of the chart are proportional to variances. |
6.5. Discussion
We would like to emphasize that the tomography terms measured on-sky match remarkably
well with their corresponding numerical simulations. This is probably one of the most
important results of the on-sky demonstration made by CANARY at phase A. Such a comparison
makes us confident in establishing the error budget of future instruments and also in the
ability to process the instrument data to properly retrieve the
profile required for
optimisation of the on-axis SR.
The other main specific term of an MOAO instrument is the open loop error. From previous laboratory measurements a value of 3 to 5% of the total turbulence perturbation was expected (Kellerer et al. 2012), leading here to 30 to 70 nm rms in our observing conditions. We measure on-sky values ranging from 50 to 160 nm rms. The difference may come from the way it has been evaluated. We measure it as the difference between the total error measured by the TS and the quadratic sum of all the error terms. Therefore the computed value can be influenced by any error in the estimation of the other terms. It contains the open loop error plus possibly all others unidentified errors such as drift in pupil alignment, badly seen turbulence on the bench etc...
Only one term has been identified on-sky that was not included in the initial simulations of CANARY; the quasi-static field aberrations residuals. They are of the order of 70 to 130 nm rms and are very difficult to calibrate properly. For us, this term includes the error linked to the mis-calibrated field dependent aberrations and the creep of the DM linked to the static voltage offsets applied to it. On the E-ELT, those static field aberrations will also not be fully static, but evolve slightly because of the field derotation and the residual errors in the active optics. This will bring a problem to all tomographic techniques and thus will have to be solved for the E-ELT instruments. Particular effort on new calibration schemes should be envisioned to reduce this term and we emphasize here the importance of the Truth Sensor for such calibrations in CANARY.
The computed SR from the error budget shows an under-estimation of the measured SR on the IR camera. We explain the difference by several factors. Firstly, the exp( − (2πσErrIR/λ)2) formula tends to be pessimistic for SR below 30%. We also observe this effect in the simulations. The simulations allow us to quantify the mismatch between the measured image SR and the exponential formula. The ratio of the IR image SR and the exponential formula is very similar for the simulations and the on-sky data as given in Table 5. Secondly, we estimate the error bars of the total error budget to be ± 50 nm rms leading to ±4.0% error on the predicted SR. Finally, we notice that r0 fluctuated significantly (typically ±2 cm in a few tens of seconds) between the recordings of the engaged slopes, the disengaged ones and the IR images. Unfortunately all the data were not perfectly synchronised. This may explain some discrepancies in Table 5.
Taking into account all these facts, we can say that the proposed error budget is validated.
7. Conclusion
CANARY is a single channel MOAO demonstrator installed at the William Herschel Telescope. It obtained the first on-sky MOAO compensated images in September 2010. In this paper, we detail the calibration procedures used in CANARY, in particular to compute the optimized tomographic estimator required in MOAO and its software implementation. We present a method to process the slope data recorded on-sky and apply this to data taken during the night of the 27th of September 2010. The presence of the Truth Sensor allowed us to build a full error budget for the instrument. We evaluate 9 error terms including the tomographic and the open loop error, which are new terms introduced by the MOAO control scheme. The tomographic error is estimated from synchronous disengaged slopes while the open loop error also requires data taken when the MOAO loop is engaged. We have also computed other classical AO error terms like noise, aliasing, bandwidth, fitting and NCPA. For the error budget, we distinguish two terms in the aliasing due to both the ground and the high altitude layer contributions. We check and successfully compare the measured on-sky error budget with numerical simulations for 3 datasets differing in guide star configuration, magnitudes and atmospheric conditions. The conclusion is encouraging, with the open-loop term, although larger than expected, being small compared to the other terms, and the tomographic term behaving as expected from simulation. But we identify on-sky an additional term linked to the residual quasi-static field aberrations found to be of the order of the open-loop term.
The turbulence profile derived from the instrument data is presented and used in the
tomographic optimization. The optimized L&A tomographic estimator based on 3 layers
computed during the on-sky operations performed at any time better than a basic ground layer
reconstruction. The average performance of the 3 layer tomographic reconstruction was 216 nm
rms while ground layer reconstruction performed at 270 nm rms representing an increase in
the performance of 162 nm rms on average during the night. We are also able to evaluate the
impact of the profile model
error in the tomographic error by testing (in simulation) estimators computed with 3 or 15
layers. Although the tomographic error is the largest contributor to the error on CANARY, it
remained stable contributing one quarter of the total error budget. The Strehl ratio on the
IR camera (λ =
1530 nm) was measured and compared to the estimated error budget. The
agreement was good. In MOAO mode we measured SR in the range of 10% to 20% with a typical
r0 value between 10
to 16 cm. Comparison with the numerical simulation makes us confident in the on-sky error
budget estimation. Therefore this paper brings some important insights for the establishment
of the wavefront error budget of future MOAO instruments.
CANARY represents a significant advance in the implementation of the future tomographic AO systems like MOAO, LTAO and even MCAO instruments. It has successfully demonstrated the tomographic optimization in a direction of interest and the accuracy of the novel open loop control scheme. The next phase of CANARY uses 4 Rayleigh Laser Guide stars in addition of the 3 natural guide stars. This phase also implements a modification of the L&A algorithm to perform with mixed measurements of natural and laser guide stars.
Acknowledgments
This work was supported by Agence Nationale de la Recherche (ANR) program 06-BLAN-0191, CNRS/INSU, Observatoire de Paris, and Université Paris Diderot Paris 7 in France, Science and Technology Facilities Council, University of Durham and the Isaac Newton Group of telescopes in UK and European Commission Framework Programme 7 (E-ELT Preparation Infrastructure Grant 211257 and OPTICON Research Infrastructures Grant 226604).
References
- Ammons, S. M., Johnson, L., Laag, E. A., et al. 2010, PASP, 122, 573 [NASA ADS] [CrossRef] [Google Scholar]
- Andersen, D. R., Fischer, M., Conan, R., Fletcher, M., & Véran, J. 2008, in Adaptive Optics Systems, eds. P. W. N. Hubin, & C. Max, Marseille, France, Proc. SPIE, 70150H [Google Scholar]
- Basden, A., Geng, D., Myers, R., & Younger, E. 2010, Appl. Opt., 49, 6354 [NASA ADS] [CrossRef] [PubMed] [Google Scholar]
- Basden, A. G., Myers, R. M., & Gendron, E. 2012, MNRAS, 419, 1628 [NASA ADS] [CrossRef] [Google Scholar]
- Beckers, J. M. 1988, in ESO Conference and Workshop Proc., 30, Very Large Telescopes and their Instrumentation, Garching, Germany, ed. M.-H. Ulrich, 693 [Google Scholar]
- Bendek, E. A., Hart, M., Powell, K. B., et al. 2011, in Astronomical Adaptive Optics Systems and Applications IV, eds. M. Tyson, & K. Robert Hart, Proc. SPIE, 8149, 11 [Google Scholar]
- Beuzit, J.-L., Hubin, N., Gendron, E., et al. 1994, in Adaptive Optics in Astronomy, eds. M. A. Ealey & F. Merkle, Proc. SPIE, 2201, 955 [Google Scholar]
- Beuzit, J.-L., Feldt, M., Dohlen, K., et al. 2008, in Ground-based and Airborne Instrumentation for Astronomy II, Proc. SPIE, 701418 [Google Scholar]
- Boyer, C., Michau, V., & Rousset, G. 1990, in Amplitude and Intensity Spatial Interferometry, Proc. SPIE, 1237, 406 [Google Scholar]
- Brangier, M. 2012, Ph.D. Thesis, Université Paris 7 Diderot, Meudon, France [Google Scholar]
- Butterley, T., Wilson, R. W., & Sarazin, M. 2006, MNRAS, 369, 835 [NASA ADS] [CrossRef] [Google Scholar]
- Conan, J. 1994, Ph.D. Thesis, Université Paris XI Orsay, France [Google Scholar]
- Cuby, J., Morris, S., Fusco, T., et al. 2010, in Ground-based and Airborne Instrumentation for Astronomy III, Proc. SPIE, 77352D [Google Scholar]
- Dipper, N. A., Basden, A., Looker, N. E., et al. 2010, in Adaptive Optics Systems II, eds. B. Ellerbroek, M. Hart, N. Hubin, & P. Wizinowich, Proc. SPIE, 77364P [Google Scholar]
- Fusco, T., Conan, J., Rousset, G., Mugnier, L. M., & Michau, V. 2001, J. Opt. Soc. Am. A, 18, 2527 [Google Scholar]
- Gendron, E., & Léna, P. 1995, A&AS, 111, 153 [NASA ADS] [Google Scholar]
- Gendron, E., Morris, T., Hubert, Z., et al. 2010, in Adaptive Optics Systems II, eds. B. Ellerbroek, M. Hart, N. Hubin, & P. Wizinowich, Proc. SPIE, 77360P [Google Scholar]
- Gendron, E., Vidal, F., Brangier, M., et al. 2011, A&A, 529, L2 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Hammer, F., Sayède, F., Gendron, E., et al. 2002, in Scientific Drivers for ESO Future VLT/VLTI Instrumentation, eds. J. Bergeron, & G. Monnet, Proc. of the ESO Workshop, Garching, Germany, 139 [Google Scholar]
- Kellerer, A., Vidal, F., Gendron, E., et al. 2012, in Adaptive Optics Systems III, Proc. SPIE, 844765 [Google Scholar]
- Kulcsàr, C., Sivo, G., Raynaud, H.-F., et al. 2012, in Adaptive Optics Systems III, Proc. SPIE, 84471C [Google Scholar]
- Marchetti, E., Brast, R., Delabre, B., et al. 2008, in Adaptive Optics Systems, eds. P. W. N. Hubin, & C. Max, Proc. SPIE, 7015, 70150F [Google Scholar]
- Martin, O., Gendron, E., Rousset, G., & Vidal, F. 2012, in Adaptive Optics Systems III, Amsterdam, Netherlands, Proc. SPIE, 8447, 84472A [Google Scholar]
- Milton, N. M., Lloyd-Hart, M., Baranec, C., et al. 2008, in Adaptive Optics Systems, eds. P. W. N. Hubin, & C. Max, Proc. SPIE, 701522 [Google Scholar]
- Morzinski, K. M., Gavel, D. T., Norton, A. P., Dillon, D. R., & Reinig, M. R. 2008, in MEMS Adaptive Optics II, Proc. SPIE, 68880S, 12 [Google Scholar]
- Myers, R. M., Hubert, Z., Morris, T. J., et al. 2008, in Adaptive Optics Systems, eds. P. W. N. Hubin, & C. Max, Proc. SPIE, 70150E [Google Scholar]
- Neichel, B., Rigaut, F., Vidal, F., et al. 2014, MNRAS, 440, 1002 [NASA ADS] [CrossRef] [Google Scholar]
- Noll, R. J. 1976, J. Opt. Soc. Am., 66, 207 [NASA ADS] [CrossRef] [Google Scholar]
- Puech, M., Rosati, P., Toft, S., et al. 2010, MNRAS, 402, 903 [NASA ADS] [CrossRef] [Google Scholar]
- Quirós-Pacheco, F., Conan, J.-M., & Petit, C. 2010, J. Opt. Soc. Am. A, 27, A182 [NASA ADS] [CrossRef] [Google Scholar]
- Ragazzoni, R., Marchetti, E., & Rigaut, F. 1999, A&A, 342, L53 [Google Scholar]
- Rigaut, F. 2002, in Beyond conventional adaptive optics, eds. E. Vernet, R. Ragazzoni, S. Esposito, & N. Hubin, Venice, Italy, ESO Conf. and Workshop Proc., 58, 11 [Google Scholar]
- Rigaut, F. 2011, http://frigaut.github.com/yao/index.html [Google Scholar]
- Rigaut, F., Neichel, B., D’Orgeville, C., et al. 2013, MNRAS, 437, 2361 [Google Scholar]
- Roddier, F. 1999, Adaptive optics in astronomy, ed. F. Roddier (Cambridge University Press) [Google Scholar]
- Rousset, G., Fontanella, J. C., Kern, P., Gigan, P., & Rigaut, F. 1990, A&A, 230, L29 [NASA ADS] [Google Scholar]
- Rousset, G., Fusco, T., Assémat, F., et al. 2010, in Adaptive Optics Systems II, eds. B. Ellerbroek, M. Hart, N. Hubin, & P. Wizinowich, Proc. SPIE, 77360S [Google Scholar]
- Sauvage, J.-F., Fusco, T., Rousset, G., & Petit, C. 2007, J. Opt. Soc. Am. A, 24, 2334 [NASA ADS] [CrossRef] [Google Scholar]
- Tokovinin, A., Tighe, R., Schurter, P., et al. 2012, in Adaptive Optics Systems III, Proc. SPIE, 8447, 84474H [Google Scholar]
- Vernet, E., Cayrel, M., Hubin, N., et al. 2012, in Adaptive Optics Systems III, Proc. SPIE, 844761 [Google Scholar]
- Vidal, F. 2009, Ph.D. Thesis, Observatoire de Paris, Meudon, France [Google Scholar]
- Vidal, F., Gendron, E., Brangier, M., et al. 2010a, in 1st AO4ELT conference, Adaptive Optics for Extremely Large Telescopes, eds. Y. Clénet, J.-M. Conan, Th. Fusco & G. Rousset (Paris, France: EDP Sciences), 07001 [Google Scholar]
- Vidal, F., Gendron, E., & Rousset, G. 2010b, J. Opt. Soc. Am. A, 27, A253 [Google Scholar]
- Vidal, F., Neichel, B., Rigaut, F., et al. 2013, in Proc. of the Third AO4ELT Conference, eds. S. Esposito & L. Fini, Adaptive Optics for Extremely Large Telescopes (Florence, Italy: INAF − Osservatorio Astrofisico di Arcetri), 13276 [Google Scholar]
Appendix A: Appendix A
Appendix A.1: A.1. White noise propagation through a first-order low-pass filter
The expression of the first-order low-pass filter is  (A.1)We want to
determine the variance
(A.1)We want to
determine the variance  of the
output yn, when
xn is a white noise
of known variance
of the
output yn, when
xn is a white noise
of known variance  . We have
. We have
 (A.2)As yn −
1 and xn cannot be
correlated, it follows that
(A.2)As yn −
1 and xn cannot be
correlated, it follows that  (A.3)or
finally
(A.3)or
finally  (A.4)
(A.4)
Appendix A.2: A.2. White noise propagation through a first-order low-pass filter with fractional delay
We let yn be a signal
resulting from the low-pass filtering described in Eq. (A.1), of a white noise xn of variance
. We
consider the signal sn deduced from
yn by a fractional
delay:  (A.5)We can replace
yn −
1 in the above equation with its expression in terms of
yn −
2 using Eq. (A.1), and compute the square of sn:
(A.5)We can replace
yn −
1 in the above equation with its expression in terms of
yn −
2 using Eq. (A.1), and compute the square of sn:
 Considering
that xn − 1 and
yn −
2 are not correlated, and using Eq. (A.4) for expressing the variance of
yn −
2, it follows that
Considering
that xn − 1 and
yn −
2 are not correlated, and using Eq. (A.4) for expressing the variance of
yn −
2, it follows that  The
re-arrangement of terms as in Eq. (A.12)
makes it clear that the result is symmetric between α and (1 − α). Values of
α of
either 0 or 1 (integer shift) reduce the expression to the previous case, with a
filtering coefficient of g/ (2 − g). The
particular case of α =
0.5 leads to
The
re-arrangement of terms as in Eq. (A.12)
makes it clear that the result is symmetric between α and (1 − α). Values of
α of
either 0 or 1 (integer shift) reduce the expression to the previous case, with a
filtering coefficient of g/ (2 − g). The
particular case of α =
0.5 leads to  .
.
Now, the variance of the difference between xn and
sn can easily be
deduced from the previous calculus, because xn and
sn cannot be
correlated. The variance of their difference is just equal to
 (A.13)
(A.13)
All Tables
Vertical altitude resolution and maximum altitude in metres computed for each pairs of the 4 WFSs.
Three disengaged data sets for the three asterisms and the corresponding tomographic error computed with a ground layer, 3 or 15 layer tomographic estimator (in nm rms).
All Figures
|
Fig. 1 CANARY MOAO demonstration configuration. Phase A of the system (left) uses three off-axis NGS to reconstruct the wavefront while one deformable mirror is driven in open loop on the on-axis star. Phase B (right) added 4 Rayleigh LGS in addition of the three NGS. |
| In the text | |
|
Fig. 2 CANARY input focal plane, equipped with a target acquisition system (TAS) carrying 3 off-axis WFS working in open loop. Light from the central star is transported by the off-axis parabolic relay including the tip-tilt stage (TT) and the deformable mirror (DM) to the output corrected focus. At this focus, the light is reflected in the visible by a dichroic plate to a fourth WFS called the Truth Sensor. Finally, the IR light is transmitted to the IR camera observing at a central wavelength of λ = 1530 nm. |
| In the text | |
|
Fig. 3 Zoom of the CANARY focal plane. Upper part illustrates the on-sky configuration where the off-axis light is reflected to the off-axis WFS. The light from the central star is sent via the DM and TT to the IR camera and TS. Lower part illustrates the open-loop calibration configuration using the reverse path calibration source. The light is illuminating the DM and TT and is retroreflected at the focal plane on one off-axis WFS. This allows us to retrieve interaction matrices for the off-axis WFS and compute misalignment and scaling errors between all the WFS. |
| In the text | |
|
Fig. 4 Geometric configuration of the 36 useful sub-apertures of a Shack-Hartmann WFS of CANARY across the WHT pupil (with a 0.286 normalised diameter central obscuration). Actuators within the pupil are represented with a cross. Actuators out of the pupil are also represented with circles. |
| In the text | |
|
Fig. 5 Map of the 3 asterisms (DSS images) observed during the September run. The tomographic estimator was computed using the 3 off-axis stars and applied in the central direction (white arrows). The dashed circle represents a 2′ diameter field of view. |
| In the text | |
|
Fig. 6 r0(cm) at 500 nm from WFS data versus local time (hour) during the night of the 27th September 2010. Dashed lines separate asterisms. |
| In the text | |
|
Fig. 7 IR image comparison at λ = 1530 nm. The four images of 30 s exposure each were taken at 00h59m18s (Seeing), 00h42m10s (GLAO), 00h29m22s (MOAO) and 00h32m28s (SCAO). Measured SR are respectively: 1%, 9%, 19.4% and 23.8%. |
| In the text | |
|
Fig. 8
|
| In the text | |
|
Fig. 9
|
| In the text | |
|
Fig. 10
|
| In the text | |
|
Fig. 11 Tomographic error (nm rms) measured using disengaged slopes versus local time (hour). Asterisms A47, A53 and A12 are respectively represented with squares, circles and triangles. For each asterism we plot the MOAO and GLAO reconstruction respectively represented in plain and blank points. |
| In the text | |
|
Fig. 12 Tomographic error measured with MOAO and GLAO estimator versus r0(cm): same points and
symbols as in Fig. 11. Dashed lines represent a fit to each dataset by a law
∝ |
| In the text | |
|
Fig. 13 Zernike expansion coefficient root mean square (log scale) of uncorrected wavefront (black/diamond), tomographic reconstruction with GLAO (black/square) MOAO correction with 3 reconstructed layers (black/circle) and 15 reconstructed layers (cross), for the disengaged slopes dataset of 3h14m. |
| In the text | |
|
Fig. 14 Quadratic difference between the GLAO and 3 layer MOAO reconstruction (triangles) as a function of the Zernike number using the same dataset as Fig. 13. The 3 layer reconstruction improves the tomographic reconstruction by 215nm rms in total. The quadratic difference between the 3 layer and 15 layer MOAO reconstruction is illustrated with circles. The 15 layers reconstruction allows us to reduce the tomographic error by 84 nm rms. |
| In the text | |
|
Fig. 15 Openloop error versus r0. |
| In the text | |
|
Fig. 16 Wavefront error (in nm rms) due to static aberrations when measured in SCAO (triangles) and MOAO (circles) configurations versus local time. |
| In the text | |
|
Fig. 17 Relative representation of the CANARY error budget at 0h10m, 3h24m and 6h07m. Areas of the chart are proportional to variances. |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.