| Issue |
A&A
Volume 542, June 2012
|
|
|---|---|---|
| Article Number | A40 | |
| Number of page(s) | 12 | |
| Section | Planets and planetary systems | |
| DOI | https://doi.org/10.1051/0004-6361/201118274 | |
| Published online | 04 June 2012 | |
Online material
Appendix A: Main disk orientation: uncertainties and systematics
We describe here the different identified sources of uncertainties and how we estimated them. To do so, we either used our actual disk data, or, when needed to get rid of the noise limitations and isolate the impact of a given effect, simulated disk data, with shapes and brightness profiles similar to that of β Pic disk7.
We quantified the impact of the various effects on the cADI, sADI, and rADI data (mean/median), whenever the uncertainties depended on the way in which the images were obtained.
A.1. Uncertainties and systematics related to data reduction and calibration
We first considered the uncertainty associated with the imperfect knowledge of the star center in the saturated images. This is caused by the NaCo PSFs not being perfectly axisymmetrical and the position of the star center in the saturated images cannot therefore be straightforwardly retrieved from the center of the PSF wings. Ideally (for a perfectly stable PSF), the offset between the true center and the one estimated from the PSF wings should be treated as an offset (bias). However, owing to the observed variations between the unsaturated PSFs images taken prior to and after the saturated images, we conservatively assume that it is an uncertainty. This uncertainty impacts both the recentering offsets that have to be applied to each saturated frame; hence the center of derotation of the PT images (which is also the center of reference for the PA measurement) and finally the measurement of the PA. To estimate the impact on the measured PA, we used a bright fake disk. We first estimated the error associated with the star center position. To do so, we computed the star center (Moffat fitting) in the unsaturated PSFs recorded just prior and after the set of saturated images, once scaled (through the DITs and neutral density filter) to the same flux levels as the saturated PSFs, using either the whole flux range of the PSF, or using only its wings up to varying levels up to 14 000 ADU (which is the level of saturation with the given observing mode). It appears that for levels between 5000 ADU and 8000 ADU (which frame the 6500 ADU threshold used for our saturated PSF fitting), the centers offsets are in the range [−0.026; 0.26] pixel on the x-axis, and [−0.011; 0.18] on the y-axis. To estimate the impact of this uncertainty in the star center on the final PA measurements, we used simulated bright fake disks that we added to the actual datacubes (hence in PT mode), and processed these data assuming that the actual star center is shifted by values of between −0.26 and +0.026 pixel on the detector x axis and between −0.18 and 0.011 pixel on the y axis; we then measured the resulting disk PA as described above. We found that the impact on the PA is rather small, less than −0.05° and 0.03°.
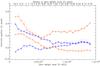 |
Fig. A.1
Measured star center on the x-axis (diamonds) and y-axis (triangles) on the detector when considering the whole unsaturated PSFs taken before (red) and after (blue) the saturated images and when considering various radius as thresholds (see text). |
| Open with DEXTER | |
 |
Fig. A.2
Impact of the considered regions for the estimation of the main disk PA (cADI images, see text). Three regions are considered: [130; 230] pixels [65–115] AU, [160; 230] pixels [80–115] AU, [200; 240] pixels [100–120] AU. Blue: two-component fit. Red = spine, maximum. Yellow: weighted Lorentzian. |
| Open with DEXTER | |
We then considered the uncertainty associated with the way in which we estimate the “PSF” is subtracted (either the mean or median of the saturated images). This uncertainty was measured on the real data. No detectable impact on the PA measurement was found, which is coherent with the fact that the measurements are performed at large separations.
We proceeded to study the uncertainty associated with the self-subtraction of the disk in the ADI procedure. This error can be estimated using bright fake disks; it was found to be smaller than 0.01° in cADI and sADI, and larger (0.04°) in rADI (1.2 and 1.5 × FWHM), but the latter value strongly depends on the rADI parameters and on the considered region.
Finally, we considered the uncertainty associated with the determination of the true north (absolute calibration) on the detector. This error was estimated to be 0.07° when considering five stars in the field of view. As mentioned before, using all stars led to a larger dispersion, 0.3°. In Table 2, the error considered was 0.07°, which has to be kept in mind.
A.2. Uncertainties and systematics related to the PA measurements
We examined first the uncertainty associated with the fitting of the main disk. For the disk PA, we first estimated the noise level (as a function of star distance) in a disk free, 10° angular region. For the maximum method, for each vertical profile, we defined the error in pixel of the brightest pixel as the largest vertical distance between pixels having a flux greater than the maximum flux – the noise rms level. For the Lorentzian fit, the use of weights prevented us from performing a linear fit to the data associated with errors. We then conservatively considered a +/−0.5 pixel error in the center measurement. Finally, for the two-component fit, we took the following approach: for each pixel of a given vertical profile, we associated an error in ADU with the noise rms level at the appropriate distance to the star. In a second step, we derived the error in pixels associated with the position of the center of the main used to compute the slopes (hence the disk(s) PA) and associated errors. The estimates were of course made on the real data. Typically, the errors were found to be less than 0.08°.
Systematics associated with the region considered for the PA determination: we performed several measurements of the disk PA with reference regions variable in size and positions (within realistic values). For the cADI data (real data), we considered two other reference regions, one from the range 130–230 pixels, and one from 200–240 pixels, in addition to the former one of from 160 to 230 pixels. With the 130–230 pixel region, we found a somewhat higher value for the PA than with the reference region, when assuming a single component disk and a similar value when considering a two-Lorentzian fit (Fig. A.2). This is because this region is more contaminated by the warped contribution than the [160–230] pixel range. When using the 200–240 pixel region, we again found a similar value with the two-Lorentzian model, and values slightly lower (0.05°) when considering a single component. The values adopted to build up the error budget are those derived from the comparison of the [160–230] pixel and [200–240] pixel regions only.
Appendix B: β Pic b position: associated uncertainties
B.1. Uncertainties related to the data reduction and calibration
To estimate the uncertainties/systematics, we procedeed as for the disk (see above), using bright fake planets positioned at the β Pic b location instead of bright simulated disks, or using the data themselves. The fake planets were created using the unsaturated PSFs8 properly scaled in flux.
To determine the uncertainty associated with the imperfect knowledge of the star center in the saturated images (see above for a detailed description), we used bright fake planets injected at the β Pic b position to measure this uncertainty, and assumed the same star center offsets as for the disk. The impact on the planet position was found to be quite significant, up to 0.3 pixels for the separation, and 0.6° for the PA. This contrasts with the low impact on the disk PA and is explained by the fact that the planet is much closer to the star than the disk.
We considered the uncertainty associated with the recentering of the individual saturated images with respect to each other within a cube. This occurred in only one reduction where the
data were intentionally not recentered within each cube, but were directly collapsed. We found an error of 0.1° (resp. 0.3°) for the measured PA for cADI (resp. sADI).
Another uncertainty is associated with the estimation of the “PSF” to be subtracted (either mean or median of the saturated images). When bright fake planets are considered, the impact is found to be very small (smaller than 0.01 pix for the separation and 0.08° for the PA) for all data.
Next, we studied the uncertainty associated with the self-subtraction of the planet in the ADI procedure. We found that the impact on a bright fake planet is quite limited for the cADI data; less than 0.1° for the PA. The effect on fainter fake planets would be larger as the signal would be closer to the noise. We therefore consider this uncertainty below.
The uncertainty associated with the residual noise is the most difficult to measure. Ideally it should be measured at the location of the planet. We could not find a way to do so because of the presence of the planet. We therefore considered several fake planets, with a flux and a separation identical to those of β Pic b, at different PA. We then measured the dispersion in the errors between the position of the injected planets and the actually measured locations after reduction. This leads to quite large uncertainties, of up to (0.3 pix; 0.5°) in cADI and (0.3 pix; 0.7°) in sADI. These values are probably conservative as we consider different directions, and in particular regions that are not free of spider signatures, which induce higher levels of noise.
We finally considered the uncertainty associated with the determination of the true north (absolute calibration) on the detector. The conclusions are the same as for the disk. We note that we considered here an 0.07° uncertainty.
B.2. Uncertainties related to the PA measurement
We also investigated the uncertainty associated with the fitting of β Pic b. We first checked that using either Gaussian or Moffat fitting does not induce significant differences. For Moffat fitting, we made several measurements using apertures of different sizes (from 5 to 7 pixels in diameters), and we positioned the center of the aperture at variable positions, within 1 pixel of the β Pic b estimated center. We found differences of up to (0.1 pix; 0.2°).
© ESO, 2012
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.