Fig. 2
Download original image
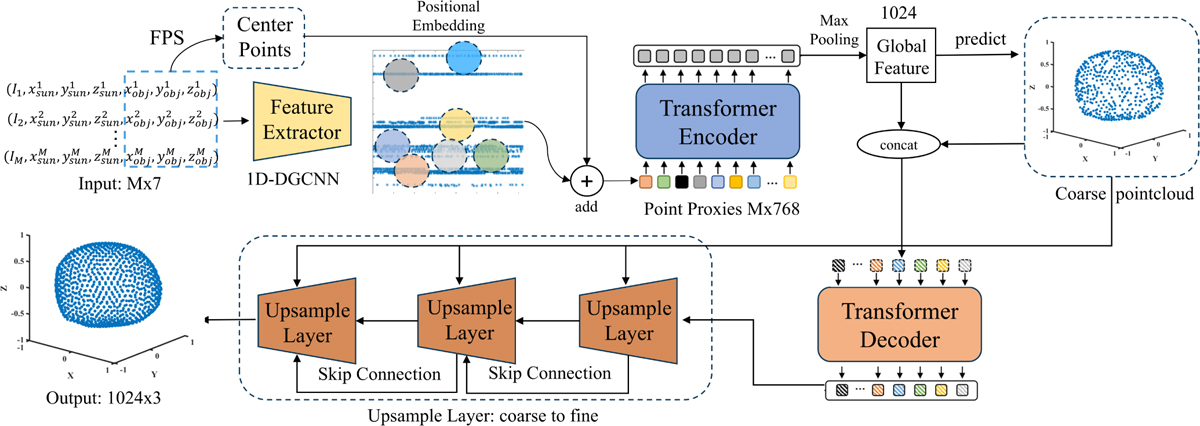
Network architecture. First, FPS is used to downsample the input light curve sampling points in order to determine the center points. Then, the nearest neighbor set corresponding to each center point is obtained with the KNN algorithm, and local features are extracted using a simplified 1D-DGCNN. Afterwards, positional embeddings are added to enhance spatial awareness. The enhanced features are encoded by a geometry-aware transformer module followed by global feature aggregation through max pooling. Finally, the coarse point cloud is refined into the output using a transformer decoder that integrates three up-sampling layers and skip connections.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.