Fig. 3
Download original image
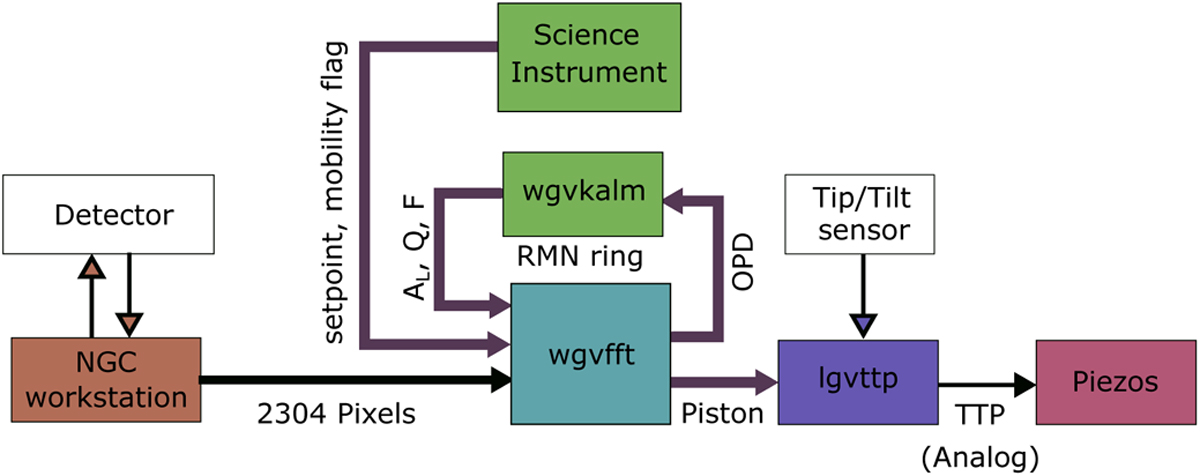
Hardware architecture of the GRAVITY fringe tracker. The realtime controller operates within the wgvfft Linux workstation. Another Linux workstation, wgvkalm, is dedicated to calculating the Kaiman filter parameters based on the observed OPDs. A Motorola CPU in the lgvttp workstation integrates the piston information with tip-tilt sensor data to accurately adjust the mirrors mounted on piezoelectric actuators in the tip-tilt piston (TTP). Additionally, an external workstation can provide the fringe tracker with piston setpoints and a mobility flag, which influences the controller behaviour.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.