Fig. 2.
Download original image
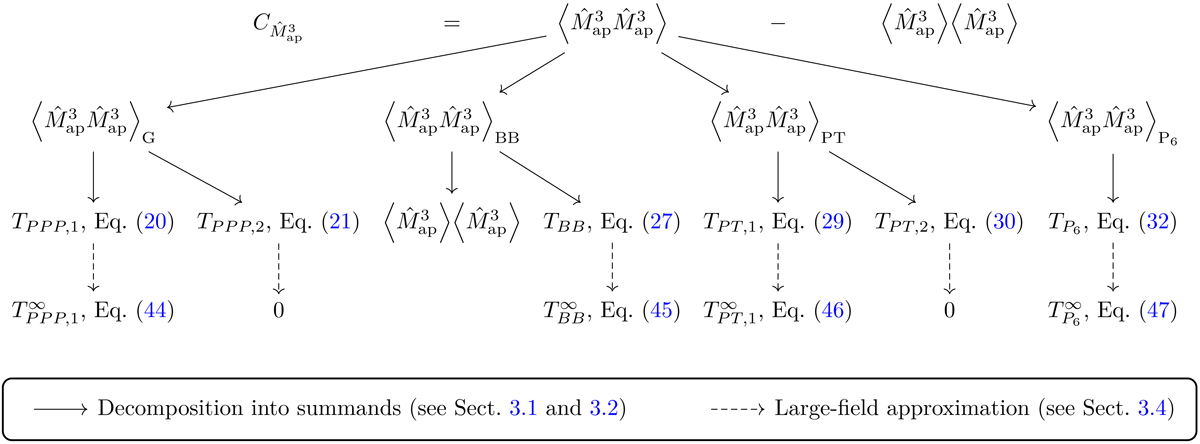
Schematic representation of the calculation of the covariance ![]() . The covariance is given by the difference between
. The covariance is given by the difference between ![]() and
and ![]() , the first of which can be decomposed (indicated by solid arrows) into one Gaussian (denoted by G) and three non-Gaussian parts (denoted by BB, PT, and P6). We discuss the Gaussian part in Sect. 3.1 and the non-Gaussian parts in Sect. 3.2. These parts can be further decomposed into terms depending on different permutations of the aperture scale radii, called TPPP, 1 to TP6. For large survey areas, the Ti can be approximated, indicated by dashed arrows, as shown in Sect. 3.4. Under this approximation, two terms vanish, which is why we term them ‘finite-field terms’. Also shown are equation numbers for the relevant expressions.
, the first of which can be decomposed (indicated by solid arrows) into one Gaussian (denoted by G) and three non-Gaussian parts (denoted by BB, PT, and P6). We discuss the Gaussian part in Sect. 3.1 and the non-Gaussian parts in Sect. 3.2. These parts can be further decomposed into terms depending on different permutations of the aperture scale radii, called TPPP, 1 to TP6. For large survey areas, the Ti can be approximated, indicated by dashed arrows, as shown in Sect. 3.4. Under this approximation, two terms vanish, which is why we term them ‘finite-field terms’. Also shown are equation numbers for the relevant expressions.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.