Fig. A.9
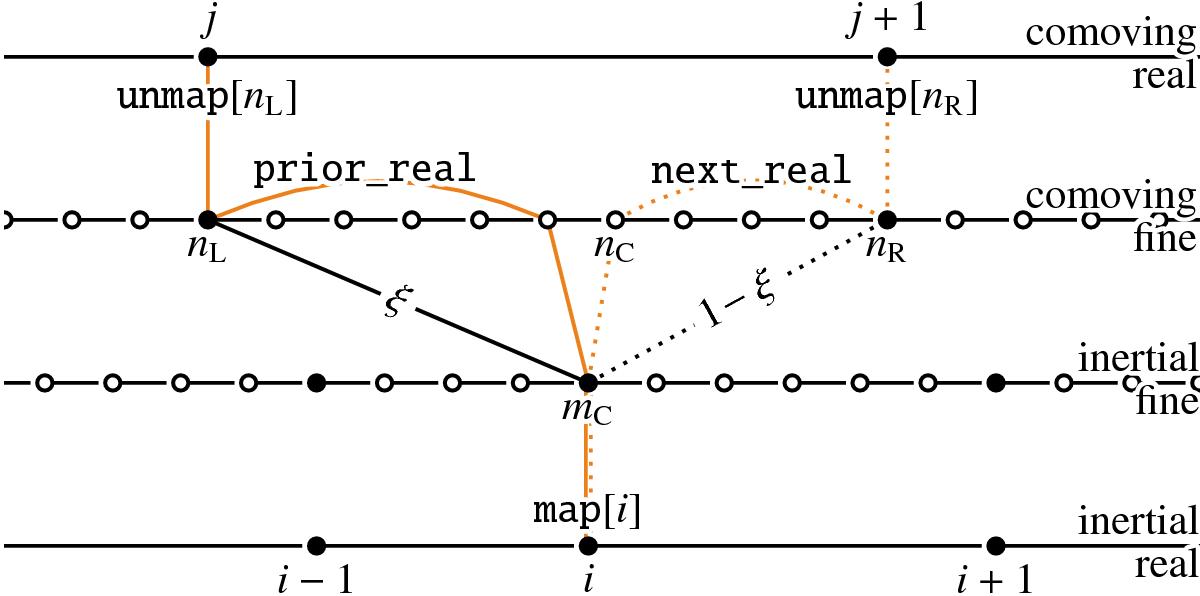
Equidistant backward interpolation from the comoving real grid onto the inertial real grid using the two fine grids. Real knots (•) are marked on the real and the fine grids; virtual knots (°) are marked on the fine grid. The inertial real knot i is projected onto the inertial fine grid using the map array (mC), and corrected for the shift s to obtain the related nearest-right neighbor nC in the comoving fine grid. If nC< 1 or nmax ≤ nC, then constant extrapolation is done. If nC is an internal knot, then we set nL = nC−1 and nR = nC and check whether they both are real. If not, we find the nearest real knots using prior_real (indicated by the solid orange curve) or next_real (indicated by the orange dotted curve). Then nL and nR are projected onto the comoving real grid to get the corresponding knots j and j + 1. The desired l.h.s. ξ (sloped solid black line) and r.h.s. 1−ξ (sloped dotted black line) weights are computed using nL, nC, nR, and 4.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.