Fig. A.4
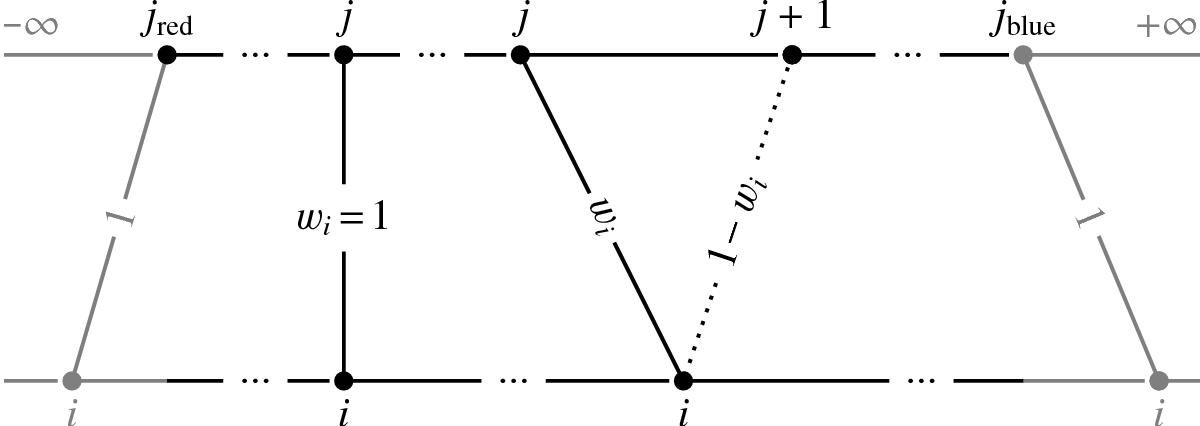
Illustration of the backward interpolation. Interpolation is performed for inertial knots i (bottom line) on intervals between comoving knots j (top line). Interpolation weights are indicated on sloped lines connecting corresponding knots between the frames. Linear interpolation is used for internal inertial knots i that lie on the internal comoving intervals [ j,j + 1) with l.h.s. 4i (solid) and r.h.s. 1−4i (dotted) weights. Weights are named with respect to the comoving frame so that the line slopes are opposite to those in the forward interpolation. Constant extrapolation with unity weights is used for inertial knots i exactly matching comoving knots j, or for inertial knots that lie on the (− ∞,jred) or [ jblue, + ∞) intervals. Both end cases are given in gray color.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.