| Issue |
A&A
Volume 562, February 2014
|
|
|---|---|---|
| Article Number | A23 | |
| Number of page(s) | 18 | |
| Section | Catalogs and data | |
| DOI | https://doi.org/10.1051/0004-6361/201322790 | |
| Published online | 31 January 2014 | |
The VIMOS Public Extragalactic Survey (VIPERS)⋆
First Data Release of 57 204 spectroscopic measurements
1
INAF – Istituto di Astrofisica Spaziale e Fisica Cosmica Milano,
via Bassini 15, 20133
Milano,
Italy
e-mail:
This email address is being protected from spambots. You need JavaScript enabled to view it.
2
INAF – Osservatorio Astronomico di Brera, via Brera 28, 20122
Milano, via E. Bianchi 46, 23807
Merate,
Italy
3
Dipartimento di Fisica, Università di
Milano-Bicocca, P.zza della Scienza
3, 20126
Milano,
Italy
4
Aix Marseille Université, CNRS, LAM (Laboratoire d’Astrophysique
de Marseille) UMR 7326, 13388, Marseille,
France
5
INAF – Osservatorio Astrofisico di Torino,
10025
Pino Torinese,
Italy
6
Canada-France-Hawaii Telescope, 65–1238 Mamalahoa Highway, Kamuela, HI
96743,
USA
7
Aix-Marseille Université, CNRS, CPT (Centre de Physique Théorique)
UMR 7332, 13288
Marseille,
France
8
INAF – Osservatorio Astronomico di Bologna, via Ranzani 1,
40127
Bologna,
Italy
9
Dipartimento di Matematica e Fisica, Università degli Studi Roma
Tre, via della Vasca Navale
84, 00146
Roma,
Italy
10
Institute of Cosmology and Gravitation, Dennis Sciama Building,
University of Portsmouth, Burnaby
Road, Portsmouth,
PO1 3FX,
UK
11
Institute of Astronomy and Astrophysics, Academia Sinica,
PO Box 23-141,
10617
Taipei,
Taiwan
12
INAF – Osservatorio Astronomico di Trieste, via G. B. Tiepolo 11,
34143
Trieste,
Italy
13
SUPA, Institute for Astronomy, University of Edinburgh, Royal
Observatory, Blackford
Hill, Edinburgh
EH9 3HJ,
UK
14
Institute of Physics, Jan Kochanowski University,
ul. Swietokrzyska
15, 25-406
Kielce,
Poland
15
Department of Particle and Astrophysical Science, Nagoya
University, Furo-cho, Chikusa-ku,
464-8602
Nagoya,
Japan
16
Dipartimento di Fisica e Astronomia - Università di Bologna,
viale Berti Pichat
6/2, 40127
Bologna,
Italy
17
INFN, Sezione di Bologna, viale Berti Pichat 6/2,
40127
Bologna,
Italy
18
Institute d’Astrophysique de Paris, UMR7095 CNRS, Université
Pierre et Marie Curie, 98 bis
Boulevard Arago, 75014 Paris, France
19
Max-Planck-Institut für Extraterrestrische Physik,
84571
Garching b. München,
Germany
20
Astronomical Observatory of the Jagiellonian University,
Orla 171,
30-001
Cracow,
Poland
21
National Centre for Nuclear Research, ul. Hoza 69,
00-681
Warszawa,
Poland
22
Universitätssternwarte München, Ludwig-Maximillians Universität,
Scheinerstr. 1,
81679
München,
Germany
23
INAF – Istituto di Astrofisica Spaziale e Fisica Cosmica Bologna,
via Gobetti 101, 40129
Bologna,
Italy
24
INAF – Istituto di Radioastronomia, via Gobetti 101,
40129,
Bologna,
Italy
25
Università degli Studi di Milano, via G. Celoria 16, 20130
Milano,
Italy
26
INFN, Sezione di Roma Tre, via della Vasca Navale 84,
00146
Roma,
Italy
27
INAF – Osservatorio Astronomico di Roma,
via Frascati 33, 00040
Monte Porzio Catone ( RM),
Italy
Received:
3
October
2013
Accepted:
4
December
2013
Abstract
We present the first Public Data Release (PDR-1) of the VIMOS Public Extragalactic Survey (VIPERS). It comprises 57 204 spectroscopic measurements together with all additional information necessary for optimal scientific exploitation of the data, in particular the associated photometric measurements and quantification of the photometric and survey completeness. VIPERS is an ESO Large Programme designed to build a spectroscopic sample of ≃100 000 galaxies with iAB < 22.5 and 0.5 < z < 1.2 with high sampling rate (≃45%). The survey spectroscopic targets are selected from the CFHTLS-Wide five-band catalogues in the W1 and W4 fields. The final survey will cover a total area of nearly 24 deg2, for a total comoving volume between z = 0.5 and 1.2 of ≃4 × 107 h-3 Mpc3 and a median galaxy redshift of z ≃ 0.8. The release presented in this paper includes data from virtually the entire W4 field and nearly half of the W1 area, thus representing 64% of the final dataset. We provide a detailed description of sample selection, observations and data reduction procedures; we summarise the global properties of the spectroscopic catalogue and explain the associated data products and their use, and provide all the details for accessing the data through the survey database (http://vipers.inaf.it) where all information can be queried interactively.
Key words: galaxies: distances and redshifts / galaxies: statistics / galaxies: fundamental parameters / cosmology: observations / catalogs / large-scale structure of Universe
Based on observations collected at the European Southern Observatory, Cerro Paranal, Chile, using the Very Large Telescope under programs 182.A-0886 and partly 070.A-9007. Also based on observations obtained with MegaPrime/MegaCam, a joint project of CFHT and CEA/DAPNIA, at the Canada-France-Hawaii Telescope (CFHT), which is operated by the National Research Council (NRC) of Canada, the Institut National des Sciences de l’Univers of the Centre National de la Recherche Scientifique (CNRS) of France, and the University of Hawaii. This work is based in part on data products produced at TERAPIX and the Canadian Astronomy Data Centre as part of the Canada-France-Hawaii Telescope Legacy Survey, a collaborative project of NRC and CNRS. The VIPERS web site is http://vipers.inaf.it/
© ESO, 2014
1. Introduction
The large-scale distribution of galaxies contains unique information on the structure of our Universe and the fundamental parameters of the cosmological model. The relation of galaxy properties to large-scale structure in turn provides important clues on the physics of galaxy formation within the standard paradigm in which baryons are assembled inside dark-matter halos (e.g. White & Rees 1978). Redshift surveys of the “local” (z < 0.2) Universe such as the 2dFGRS (Colless et al. 2001) and SDSS (Abazajian et al. 2003) include more than a million objects observed over several thousand square degrees. Thanks to such excellent statistics, large-scale structure studies have been extended well into the linear regime (r ≫ 10 h-1 Mpc) while at the same time having a detailed characterization of small-scale clustering and its dependence on galaxy properties like luminosity, colour and morphology (e.g. Madgwick et al. 2003; Norberg et al. 2002; Zehavi et al. 2005; Li et al. 2006). All these features and properties are expected to depend on redshift, and different evolutionary paths can lead to similar observational properties in the local universe. Ideally, one would like to be able to gather similarly large samples over comparably large volumes, at cosmologically relevant distances (z ≫ 0.3).
Pioneering deep surveys capable of measuring the evolution of clustering since z ~ 1 date back to the 1990s and were limited to a few hundred square arcminutes (e.g. Le Fèvre et al. 1996; Shepherd et al. 2001). Studies extending further in redshift were limited to specific color-selected samples based on the Lyman-break technique (e.g. Steidel et al. 1998). More recent surveys like GOODS (e.g. Giavalisco et al. 2004) provided a broader view of the high-redshift population, but still limited to small fields. Only with the advent of multi-object spectrographs mounted on 10 m class telescopes, significant clustering studies of the general galaxy population at z ~ 1 became feasible as notably exploited by the VVDS (Le Fèvre et al. 2005) and the DEEP2 (Davis et al. 2003) surveys, followed by the zCOSMOS follow-up of the COSMOS HST field (Lilly et al. 2009). While important clustering studies at z ~ 1 were produced, it became soon clear that these samples remained in general dominated by field-to-field fluctuations (cosmic variance), as dramatically shown by the discrepancy between the VVDS and zCOSMOS correlation functions at 0.5 < z < 1 (de la Torre et al. 2010). Only the Wide extension of VVDS (Garilli et al. 2008), started to probe sufficient volume at these epochs, as to attempt cosmologically meaningful computations (Guzzo et al. 2008), albeit still with large error bars.
Following those efforts, and somewhat complementarily, new generations of cosmological surveys have mostly focused on covering the largest possible volumes at intermediate depths, utilizing relatively low-density tracers, with the main goal of measuring the BAO signal at redshifts 0.4–0.8. This is the case with the SDSS-3 BOSS project (Eisenstein et al. 2011), which extends the concept pioneered by the SDSS selection of Luminous Red Galaxies (e.g. Anderson et al. 2012; Reid et al. 2012). Similarly, the WiggleZ survey targets emission-line galaxies selected from UV observations of the GALEX satellite (Drinkwater et al. 2010; Blake et al. 2011b,a). Both these surveys are characterized by a very large volume (1−2 h-3Gpc3), and a relatively sparse galaxy population (~10-4 h3 Mpc-3). Complementarily, the GAMA survey (Driver et al. 2011) aims to achieve a number of redshifts similar to the 2dFGRS (~200 000) down to r < 19.8, covering a smaller volume (z ≃ 0.5) but with a sampling close to unity.
The VIMOS Public Extragalactic Redshift Survey (VIPERS; Guzzo et al. 2013), of which we present here the first public data release, has been designed to collect ~105 redshifts to the same depth of VVDS-Wide and zCOSMOS (iAB < 22.5), but over a significantly larger volume and with high sampling (~40%). The general aim of the project is to build a sample of the global galaxy population that matches in several respects those available locally (z < 0.2) from the 2dFGRS and SDSS projects, thus allowing combined evolutionary studies of both clustering and galaxy physical properties, on a comparable statistical footing. Building upon the experience and results of previous VIMOS surveys VIPERS arguably provides the most detailed and representative picture to date of the whole galaxy population and its large-scale structures, when the Universe was about half its current age.
The main goals of VIPERS are:
-
1.
To measure the clustering of galaxies at ⟨z⟩ ≃ 0.8 on scales up to ~100 Mpc h-1, in order to:
-
(a)
extract cosmological information from the large-scale shape of the power spectrum (Bel et al. 2013; Granett et al. 2012; Xia et al. 2012);
-
(b)
quantify the dependence of galaxy clustering on galaxy physical properties (such as luminosity and stellar mass) and its evolution with time (Marulli et al. 2013);
-
(c)
quantify the mean galaxy occupation of dark matter halos using small/intermediate-scale clustering and its time evolution;
-
(d)
study the halo occupation distribution (HOD) using a combination of galaxy-galaxy lensing, galaxy clustering and stellar mass functions (Coupon et al., in prep.);
-
(e)
measure higher-order clustering statistics and characterize the non-linear development of clustering over the past 7 billion years.
-
(a)
-
2.
To measure, at the same redshifts, the growth rate of structure using redshift-space distortions in the observed clustering (de la Torre et al. 2013), in particular exploiting the broad population and high spatial sampling of VIPERS through the use of multiple tracers of the underlying mass density field.
-
3.
To precisely characterise the galaxy population at ⟨ z ⟩ ≃ 0.8 in terms of the distributions of fundamental properties such as luminosity, colours and stellar mass, tracing their evolution with cosmic time (Davidzon et al. 2013; Fritz et al. 2013).
-
4.
To reconstruct the density field at ⟨ z ⟩ ≃ 0.8 in order to:
-
(a)
determine the bias parameter and its evolution b(z) (Branchini et al., in prep.);
-
(b)
quantify at these redshifts the relationship between galaxy properties and local environment, elucidating the role of mass and environment in the evolution of galaxies.
-
(a)
-
5.
To provide the community with an unprecedented spectroscopic database at 0.5 < z < 1.2, including extensive information on galaxy physical properties. The latter is made possible by combining the spectral information with the CFHTLS five-band magnitudes on which the survey is based1 (Goranova et al. 2009), plus additional ancillary data in the UV and infrared bands (GALEX, UKIDSS, VISTA, SWIRE, VLA, XMM-LSS), enabling to derive Spectral Energy Distribution information (Marchetti et al. 2013; Davidzon et al. 2013) and automatic galaxy/AGN/stellar classification (Małek et al. 2013).
Although carried out within the standard (proprietary) scheme of the ESO Large Programmes, VIPERS was conceived from its start as a public survey, with the clear idea that the range of science that will be performed by the community should greatly exceed the core analyses described above. The set of data that is described in this paper and made public with the VIPERS Public Data Release 1 (PDR-1), is the same used for all papers of the first VIPERS science release of March 2013. Several aspects of the survey construction and the data are also discussed in Guzzo et al. (2013) and are only briefly summarised here.
The layout of the paper is as follows: Sect. 2 summarises the survey strategy and design; Sect. 3 describes the VLT-VIMOS observations; Sect. 4 discusses the data reduction, including redshift estimation and quality tests; Sect. 5 presents the PDR-1 sample, discussing redshift errors and comparison to external data; Sect. 6 describes the survey masks and discusses in detail the selection effects that need to be taken into account for a proper use of the PDR-1 data; Sect. 7 provides a first look at the VIPERS spectra, including a brief preliminary discussion of trends and correlations spectral features and galaxy classification schemes; Sect. 8 provides information on the data access in the VIPERS data base; finally, Sect. 9 provides a brief summary.
2. Survey strategy and design
2.1. Star-galaxy separation and target definition
VIPERS was conceived in 2007, focusing on the study of clustering and redshift-space distortions at z ≃ 0.5−1.2, but with a desire to enable broader goals involving large-scale structure and galaxy evolution. The survey design was also strongly driven by the specific features of the VIMOS spectrograph, which has a relatively small field of view compared to fibre-fed instruments (≃18 × 16 arcmin2), but a larger yield in terms of redshifts per unit area (up to 1000 spectra per exposure: Le Fèvre et al. 2003).
The VIPERS overall sky coverage and field layout is shown in Fig. 1; the solid red line delimits the planned area, while the black dots show the spectroscopically observed objects. Table 1 shows the area planned in each of the two survey fields as well as the area already spectroscopically covered, which is the subject of the current data release. The effective area is computed taking into account only those portions of sky effectively exposed, i.e. not considering failed quadrants and the dead cross between VIMOS quadrants. The last column in Table 1 gives the area where photometry is reliable (see Sect. 6.1).
VIPERS survey field positions and area coverage.
 |
Fig. 1 VIPERS survey areas. Black areas are the spectroscopically observed pointings. The thick red line delimits the full area at the survey end. In the current release, some holes due to bad observing conditions are present. Some of them will be filled before the end of the survey. |
Given the luminosity function of galaxies and results from previous VIMOS surveys (VVDS Deep and Wide: Le Fèvre et al. 2005; Garilli et al. 2008; zCOSMOS: Lilly et al. 2009), it was known that a magnitude-limited sample with iAB < 22.5 would cover the redshift range out to z ~ 1.2, and could be assembled with fairly short VIMOS exposure times (<1 h). Also, taking 2dFGRS as a local reference, a survey volume around 5 × 107 h-3Mpc3 could be explored by observing an area of ≃24 deg2.
Building upon this experience, VIPERS was designed to maximize the number of galaxies observed in the range of interest, i.e. at z > 0.5, while at the same time attempting to select against stars that represented a contamination of up to 30% in some of the VVDS-Wide fields (where by design no star-galaxy separation whatsoever had been applied: see Garilli et al. 2008). Therefore we searched for a criterion that could limit the stellar contamination without hampering the completeness of the galaxy sample.
Stars and galaxies were separated using both their measured size and their spectral energy distribution, derived through template fitting of the high-quality CFHTLS 5-band photometry. As shown by the extensive tests carried out using the fully sampled VVDS (Deep and Wide) data, the overall galaxy completeness and resulting stellar contamination can be optimized by applying the following criteria (Guzzo et al. 2013):
-
1.
At iAB < 21, stars are defined to be objects with rh < μrh + 3σrh. Galaxies are the complementary class.
-
2.
At iAB ≥ 21, the previous criterion would exclude small compact galaxies from the target sample. For these reason, objects are discarded as bona fide stars if rh < μrh + 3σrh AND
 ,
,
where rh is the half-light radius of an object;
μrh and σrh are the mean and
standard deviation of the rh distribution; while
 and
and
 result from
the spectral energy distribution template fitting applied to the CFHTLS
photometry.
result from
the spectral energy distribution template fitting applied to the CFHTLS
photometry.
The desired redshift range (z > 0.5) for the
objects classified as galaxies is then selected requiring that  (1)(see Fig. 3 in
Guzzo et al. 2013).
(1)(see Fig. 3 in
Guzzo et al. 2013).
2.2. Additional AGN targets
To broaden the scientific yield of the project, without affecting the purity of the
galaxy selection function, it was also decided to supplement the target list with a small
number of active galactic nuclei (AGN) candidates: (1) a set of 449 X-ray selected
candidates from the XMM-LSS survey in the W1 field (Pierre
et al. 2007), supplied by the XMM-LSS Consortium and added as compulsory targets
(average of one object every two quadrants); and (2) a set of 3696 photometrically defined
AGN candidates, selected among stellar objects resulting from the previous star-galaxy
separation. In a first version, an object was classified as an AGN candidate if its
colours satisfied the following criteria:  (2)These
criteria were calibrated on the VVDS point-like objects brighter than
iAB = 21, and we expected a sample with a completeness of
87.5% and with a stellar contamination of 36%. These percentages were not confirmed by the
actual data at the end of the first observing season, indicating a significantly higher
than expected contamination from stars. While investigating the origin of this
discrepancy, we decided to revise criteria towards a more restrictive definition,
following which an AGN candidate must satisfy CC1 (Eq. (2)) and:
(2)These
criteria were calibrated on the VVDS point-like objects brighter than
iAB = 21, and we expected a sample with a completeness of
87.5% and with a stellar contamination of 36%. These percentages were not confirmed by the
actual data at the end of the first observing season, indicating a significantly higher
than expected contamination from stars. While investigating the origin of this
discrepancy, we decided to revise criteria towards a more restrictive definition,
following which an AGN candidate must satisfy CC1 (Eq. (2)) and:  (3)This
more stringent definition has been applied very early in the survey (from 2010 onwards) so
that only 1% of the spectroscopically confirmed AGN satisfy CC1 only.
(3)This
more stringent definition has been applied very early in the survey (from 2010 onwards) so
that only 1% of the spectroscopically confirmed AGN satisfy CC1 only.
AGN redshifts from photometrically defined candidates are included in the released catalogue, but the precise selection function to correct for any incompleteness is still being verified. Brighter than iAB = 21, where our selection for point-like AGN had been tested, the number counts of the AGN candidates and the confirmation rate are as expected. Fainter than that, where AGN have been observed as part of the primary target sample, the selection function changes. A complete analysis of the sample of spectroscopically confirmed AGN will be the subject of a separate paper. The 189 XMM-LSS AGN candidates observed so far are not included in PDR-1, and will be analysed separately.
3. VLT-VIMOS observations
The VIPERS survey is being performed in the framework of the ESO Large programmes and is carried out using VIMOS on “Melipal”, the Very Large Telescope (VLT) Unit 3 (Le Fèvre et al. 2003). VIMOS (Visible Imager Multi Object Spectrograph) makes use of slits cut out from masks. Its field of view of ≃18 × 16 arcmin2 is divided into four quadrants, each having an area of ≃7 × 8.1 arcmin2. Each quadrant corresponds to an independent spectrograph and the four spectrographs observe in the same configuration for the same exposure time.
The standard VIMOS observing procedure requires the acquisition of a direct image, which is used for mask preparation with the vmmps software (Bottini et al. 2005) distributed by ESO: vmmps assigns the slit length taking into account object dimensions and sky subtraction regions as specified by the user. The minimum slit length can be changed by the software as part of the optimization process, to maximize the number of slits per quadrant. The files containing the mask definition are sent to ESO (via the P2PP tool) for mask cutting before spectroscopic observations. As VIMOS suffers from some flexure problems, calibration exposures are performed immediately after the scientific exposures, maintaining the instrument at the same rotation angle as the scientific exposure and inserting a screen at the Nasmyth focus. This ensures that we have calibration lamps with the same flexure-induced distortions as the scientific images, thus allowing for a more precise wavelength calibration. The instrument has no atmospheric dispersion compensator; in order to avoid spectra distortions due to atmospheric refraction, observations are confined within ±2 h from the meridian.
Given the chosen magnitude limit (iAB ≤ 22.5), the total exposure time adopted for the VIPERS spectroscopic observations is 2700 s. The observation of one pointing is split into five exposures of nine minutes each. Observations have been carried out aligning slits along the east-west direction, so that atmospheric refraction effects are minimized. We use 1-arcsec wide slits, a value which well matches the average seeing in Paranal. The “Low-Resolution Red” (LR-Red) grism is used, providing a spectral resolution R ≃ 230 and a mean dispersion of 7.3 Å/pixel. When preparing masks, we have allowed for a minimum of 1.8 arcsec per side for sky subtraction. In order to further boost the survey sampling and the multiplexing capabilities of VIMOS, we have followed the approach described in Scodeggio et al. (2009): essentially, we have arbitrarily assigned an object size of 0.5 arcsec to all VIPERS sources. In this way, vmmps has more freedom in the slit positioning optimization process, and we have been able to increase the number of objects per quadrant by ~10%, reaching a median of 87 slits per quadrant (see Fig. 2). The drawback of this approach is that bigger objects have a non-negligible chance of filling most of the slit, and sometimes the automatic spectral extraction may fail. A posteriori we have verified that the median slit length is 7 arcsec, and that only a few among the brightest objects suffer from this problem.
 |
Fig. 2 Distribution of the number of slits per VIPERS quadrant. |
4. Spectroscopic observations and data reduction
4.1. Quality of VIMOS raw data
VIPERS observations started in September 2008 and have proceeded at a steady rate since then. The median airmass of PDR-1 data is 1.14, and remains below 1.3 in 90% of the exposures. To match the slit width and minimize slit losses, the requested maximum seeing was 1 arcsec. Figure 3 shows the seeing distribution as measured from the scientific exposures. The median seeing is 0.8 arcsec and 90% of exposures have a seeing below 1.05 arcsec. 85% of observations have been carried out in dark time, while the remaining fraction either had a moon illumination below 20%, or a moon distance above 70 deg.
 |
Fig. 3 Distribution of seeing values for VIPERS observations. |
In spring/summer 2010, VIMOS was upgraded with new red-sensitive CCDs in each of the 4 channels (Hammersley et al. 2010). The original thinned E2V detectors were replaced by twice as thick E2V devices, considerably lowering the fringing and increasing the quantum efficiency by up to a factor two over the wavelength range of the LR-Red grism. The lesser (almost non-existent) fringing allows for a better sky subtraction redwards of 7500 Å (where OH bands dominate the sky emission), which improves the data quality. In the following, we use the term “epoch 1” to denote data acquired before the refurbishment, and “epoch 2” for data acquired afterwards. Overall, 22049 targets have been observed in epoch 1, and 40813 in epoch 2 (see Table 3).
 |
Fig. 4 A typical 2D extracted spectrum from epoch 1 data (top) and epoch 2 data (bottom). Wavelength ranges from 5600 Å to 9500 Å from left to right. Spatial direction is along the y axis. |
In Fig. 4 we show a typical 2D extracted spectrum from epoch 1 data (top) and epoch 2 data (bottom). The improved sky subtraction in epoch 2 data is clearly visible. More quantitatively, Fig. 5 shows the distribution of the r.m.s. of the sky subtraction residuals in the 7500–9100 Å wavelength range for epoch 1 (empty histogram) and epoch 2 (shaded histogram) data. The median of the distribution diminishes by a factor 2.6, clearly demonstrating the significant improvement in the sky subtraction. In Sect. 5 we will show how this affects the redshift measurement. The VIMOS upgrade also included substituting the old passive flexure compensation system with a new active flexure compensator (AFC), which should be more reliable and precise. Unfortunately, for a few months the AFC was operational only during target acquisition. In other words, some observing runs were actually carried out without any flexure compensation system during the spectroscopic exposure. This implies that during the same OB the images of the slits moved up to 2 pixels on the detector plane. To account for this effect, we have modified the reduction pipeline to perform the slit tracing exposure by exposure. Since the arc lamp is always acquired at the end of the OB, its tracing is slightly different from the tracing of the first exposure, implying that the wavelength calibration at the slit edges is not as good as at the slit centre. This has a minor effect on the quality of the sky subtraction: unless the object is very far from the slit centre, the only consequence is that 2D spectra are noisier close to the edges. In Sect. 5 we will show that the redshift measurement is statistically unaffected.
4.2. Data reduction procedure
VIPERS data reduction is performed with a fully automated pipeline, starting from the raw data and flowing down to the wavelength- and flux-calibrated spectra and redshift measurement. The pipeline is an updated version of the algorithms and dataflow from the original VIPGI system, fully described in Scodeggio et al. (2005). We summarise here the main concepts.
As a first step, in each raw frame the 2D dispersed spectra are located and traced. Each
raw spectrum is collapsed along the dispersion direction, and the object location
computed. A first sky subtraction is performed row by row, avoiding the region identified
as the object. An inverse dispersion solution is computed for each column of each
dispersed spectrum making use of an arc calibration lamp. The wavelength calibration
residuals distribution is well peaked around 0.771 Å (i.e. 1/10 of a pixel) and 97% of
spectra have a wavelength calibration uncertainty below 1.25 Å (1/5 of a pixel). The
inverse dispersion solution is applied before extraction. A further check on the
wavelength of sky lines is computed on the linearized 2D spectra, and, if needed, a rigid
offset applied to data in order to bring the sky lines to their correct wavelength. The
different scientific exposures of the same field are registered and co-added, and a second
background subtraction is performed repeating the procedure carried out before. Finally,
1D spectra are extracted applying the Horne extraction algorithm (Horne 1986), and spectra are corrected for the instrument sensitivity
function, as derived from the standard spectrophotometric observations routinely carried
out by ESO. Given a 2D spectrum, we can compute sky subtraction residuals as  (4)where NRegion is the
number of pixels in the sky region on one side of the object, ⟨ C ⟩ is
the mean of the counts in the sky region and
Cj are the counts in pixel
j, at wavelength i. This computation is done on both
sides of the object (resL and resR), taking into account slit borders and possible second
objects in the slit. From such residuals, a mean noise spectrum is computed, the noise in
the i-th pixel being given by
(4)where NRegion is the
number of pixels in the sky region on one side of the object, ⟨ C ⟩ is
the mean of the counts in the sky region and
Cj are the counts in pixel
j, at wavelength i. This computation is done on both
sides of the object (resL and resR), taking into account slit borders and possible second
objects in the slit. From such residuals, a mean noise spectrum is computed, the noise in
the i-th pixel being given by  (5)where
Si are the source counts at wavelength
i. To obtain fully flux calibrated spectra, while correcting for slit
losses, we have convolved each spectrum with the CFHTLS i filter response
function, and computed a normalization factor between the spectrum and the photometric
magnitude. We then run EZ (Garilli et al. 2010) on
all 1D extracted spectra for a first automatic redshift measurement. All data reduction
has been centralised in our data reduction and management centre at INAF – IASF Milano.
When ready, the fully reduced data are made available to the team within a dedicated
database. The full management of these operations within the EasyLife
environment is described in Garilli et al.
(2012).
(5)where
Si are the source counts at wavelength
i. To obtain fully flux calibrated spectra, while correcting for slit
losses, we have convolved each spectrum with the CFHTLS i filter response
function, and computed a normalization factor between the spectrum and the photometric
magnitude. We then run EZ (Garilli et al. 2010) on
all 1D extracted spectra for a first automatic redshift measurement. All data reduction
has been centralised in our data reduction and management centre at INAF – IASF Milano.
When ready, the fully reduced data are made available to the team within a dedicated
database. The full management of these operations within the EasyLife
environment is described in Garilli et al.
(2012).
 |
Fig. 5 Median noise r.m.s. distribution of the VIPERS spectra in the 7500–9100 Å wavelength range. Empty histogram refers to data acquired before VIMOS refurbishment, shaded histogram to those acquired after the refurbishment. |
4.3. Redshift estimation, reliability flags and confidence levels
In most cases, the final redshift measurement is performed and validated by two team members independently. The reliability of the measured redshifts is quantified at the time of validation following a scheme similar to that used for the VVDS (Le Fèvre et al. 2005) and zCosmos surveys (Lilly et al. 2007). Measurements of stars and galaxies are flagged using the following convention:
-
Flag 4: a highly reliable redshift (estimated to have >95% probability of being correct), based on a high SNR spectrum and supported by obvious and consistent spectral features.
-
Flag 3: also a very reliable redshift, comparable in confidence with Flag 4, supported by clear spectral features in the spectrum, but not necessarily with high SNR.
-
Flag 2: a fairly reliable redshift measurement, but not as straightforward to confirm as for Flags 3 and 4, supported by cross-correlation results, continuum shape and some spectral features, with expected chance of ≃75% to be correct. We shall see in the following that the actual estimated confidence level will turn out to be significantly better.
-
Flag 1: a reasonable redshift measurement, based on weak spectral features and/or continuum shape, for which there is roughly a 50% chance that the redshift is actually wrong.
-
Flag 0: no reliable spectroscopic redshift measurement was possible.
-
Flag 9: a redshift based on only one single clear spectral emission feature.
-
Flag -10: spectrum with clear problems in the observation or data processing phases. It can be a failure in the vmmps Sky to CCD conversion (especially at field corners), or a failed extraction by VIPGI (Scodeggio et al. 2005), or a bad sky subtraction because the object is too close to the edge of the slit.
Broad-Line AGN can be easily identified during the validation process from the width of their emission lines. The flagging system for AGN is similar, though not identical, to the one adopted for stars and galaxies:
-
Flag 14: secure AGN with a > 95% reliable redshift, including at least 2 broad lines;
-
Flag 13: secure AGN with good confidence redshift, based on one broad line and some faint additional feature;
-
Flag 19: secure AGN with one single secure emission line feature, redshift based on this line only;
-
Flag 12: a > 95% reliable redshift measurement, but lines are not significantly broad, might not be an AGN;
-
Flag 11: a tentative redshift measurement, with spectral features not significantly broad.
Serendipitous (also called secondary) objects appearing by chance within the slit of the main target are identified by adding a “2” in front of the main flag. In Sect. 4.5 we will assess the actual confidence levels of the flags by comparing with results of other surveys.
Once the final review of the redshifts is complete, a decimal part of the flag “.X” indicating concordance or discordance with the photometric redshift is added to the main flag. An automatic algorithm cross-correlates the spectroscopic measurement (zspec) with the corresponding photometric redshift (zphot), estimated from the five-band CFHTLS photometry using the Le Phare code (Ilbert et al. 2006; Arnouts & Ilbert 2011). The 68% confidence interval [zphot−min,zphot−max] (in general not symmetric) based on the PDF of the estimated zphot is provided by Le Phare. If zspec is included within the zphot−min − zphot−max range, spectroscopic and photometric redshifts are considered in agreement and a flag 0.5 is added to the primary flag. Redshifts are instead in marginal agreement (and a flag 0.4 is added) when they are comparable only at the 2σ level, where 2σ is the minimum (maximum) between zphot−0.05 × (1 + zphot) and zphot−min (zphot + 0.05 × (1 + zphot) and zphot−max), being 0.05 twice the median scatter of the comparison between zspec and zphot. This allows us to signal cases in which the PDF of the single measurement is rather narrow, but still the spectroscopic redshift is close. Finally, we add “0.2” to the redshift flag when neither of the two criteria is satisfied, and “0.1” when no zphot estimate is available.
Thus, whatever the primary integer flag is, a flag “*.5” or “*.4” is an indication supporting the correctness of the redshift. This is particularly useful in the case of highly uncertain, flag = 1 objects, for which the confidence level can be increased by the agreement with the photometric redshift value. In all VIPERS papers redshifts with flags ranging between 2.X and 9.X are referred to as reliable redshifts and are the only ones normally used in the science analysis.
 |
Fig. 6 Comparison between photometric and spectroscopic secure redshifts in the VIPERS survey. The dashed lines are for zphot = zspec ± 0.15(1 + zs). |
In Fig. 6 we show the comparison between photometric and spectroscopic redshifts for the subsample of secure spectroscopic redshifts. The dispersion, computed as the normalised median absolute deviation σΔz/(1 + zs) = 1.48 ∗ median(| Δz|/(1 + zs)), is 0.03 while the outlier rate, i.e. the proportion of objects with | Δz| ≥ (1 + zs), is 5.12%, in excellent agreement with what obtained by Coupon et al. (2009) for the CFHTLS T0004 fields.
4.4. Repeated observations and redshift errors
The footprint of VIMOS is not a perfect rectangle, as each quadrant has a slightly different width. When designing the survey pointings, we have allowed for a small overlap (of the order of few arcseconds) between adjacent pointings. Objects falling within this overlapping region have some chance of being observed twice, and this happened for 783 objects in the VIPERS survey. Additionally, during the re-commissioning of VIMOS after the CCD refurbishment in summer 2010, four pointings were re-observed to verify the performance with the new setup (Hammersley et al. 2010), targeting further 1357 objects. In total, this results in a very useful sample of 2143 objects observed at least twice. After excluding second objects, stars and AGNs, we are left with 1235 target galaxies yielding a reliable redshift (i.e. with a flag ≥2) in both measurements, of which 1192 have compatible measurement, i.e. the two redshifts differ by less than Δ/(1 + z) < 3σz ≃ 0.0025. This subsample can be used to obtain an estimate of the internal rms value of the redshift error of VIPERS galaxies, as discussed in Guzzo et al. (2013) and reported here for completeness.
 |
Fig. 7 Distribution of the differences between two independent redshift measurements of
the same object, obtained from a set of 1192 VIPERS galaxies with redshift flag ≥2.
Top: distribution of the velocity differences
Δv = cΔz/(1 + z).
Catastrophic failures, defined as being discrepant by more than
Δz = 6.6 × 10-3(1 + z), have been
excluded. The best-fitting Gaussian has a dispersion of
σ2 = 200 km s-1, corresponding to a
single-object rms error |

In Fig. 7, top panel, we show the distribution of rest frame velocity difference for these compatible measurements. The distribution is well fitted by a Gaussian centred on the origin with a standard deviation of σ = 200 km s-1, corresponding to a single-object 1σ error σv = σ2/21/2 = 141 km s-1. In terms of redshift, this yields a standard deviation on the redshift measurements of 0.00047(1 + z). Using only the most reliable spectra (i.e. flags 3 or 4 in both measurements), we are left with 648 double measurements and the resulting rest-frame 2-object dispersion decreases to σ2 = 195 km s-1. This indicates that flags 9, 2, 3 and 4 are substantially equivalent in terms of redshift precision when the redshift is correct. In the next section we will discuss the confidence level of redshifts for each flag.
Confidence of redshift flags.
4.5. Statistical confidence levels corresponding to redshift flags
A first estimate of the actual, statistical confidence level of the redshift flags associated to our redshift measurements has been presented in Guzzo et al. (2013) using the available duplicated observations mentioned above. These results are reported in the top part of Table 2. Here we extend and complement this analysis, making use of external measurements.
The confidence level of a given Flag class (e.g. Flag 3+4) from VIPERS, which we call survey X for simplicity, can be estimated from the fraction of measurements in agreement among those galaxies observed independently by another survey, Y, with comparable or better reliability. We note that while this latter aspect is easy to evaluate when comparing VIPERS to a survey like VVDS, which was observed with a very similar set-up, evaluating the intrinsic redshift reliability of a very different data set, for which additionally we may only have literature information, is less straightforward. This will be the case for the second comparison case discussed below, i.e. the PRIMUS survey.
In practice, if Nmeas is the number of common measurements
and Nagree is the number of redshifts in agreement2, then the probability for two redshifts to agree
corresponds to the combined probability that X and Y
give the correct redshift, i.e.  (6)If we are
considering the same Flag category for both data sets and assume that the flags indicate
similar confidence levels for the measurements, then
P(X) ≃ P(Y) and thus
(6)If we are
considering the same Flag category for both data sets and assume that the flags indicate
similar confidence levels for the measurements, then
P(X) ≃ P(Y) and thus
 (7)On the other hand, if we
are comparing two classes with different intrinsic confidence levels, we need to estimate
that of the reference class (e.g. P(Y)), to be able to
compute P(X), i.e.
(7)On the other hand, if we
are comparing two classes with different intrinsic confidence levels, we need to estimate
that of the reference class (e.g. P(Y)), to be able to
compute P(X), i.e.  (8)While for
internal data it is often straightforward to estimate
P(Y), this is non-trivial for data obtained from the
literature, unless it is certain that the reference class is of much higher reliability
than the one for which we want to estimate the confidence. In such a case,
P(Y) ≃ 1 can be a reasonable assumption.
(8)While for
internal data it is often straightforward to estimate
P(Y), this is non-trivial for data obtained from the
literature, unless it is certain that the reference class is of much higher reliability
than the one for which we want to estimate the confidence. In such a case,
P(Y) ≃ 1 can be a reasonable assumption.
Comparison to VVDS. Some areas within both W1 and W4 fields have been observed within the VVDS survey and a similar comparison between VIPERS and VVDS has been presented in Le Fèvre et al. (2013). Let us make the reasonable assumption that the typical redshift error in VVDS and VIPERS are comparable, with rms dispersion σz. We are aware that an improvement in SNR has certainly been introduced for the VIPERS data by the refurbishment of the detectors in 2010; our assumption will only make the comparison more conservative for VIPERS. There are 420 objects with a reliable (flag 2 through 9) redshift in VIPERS which have a highly reliable (flag 3 and 4) in VVDS.
The results are shown in the central part of Table 2. We first compared VIPERS Flag 3 and 4 redshifts with the same class of VVDS, obtaining a confidence level of 98.5%; this is very consistent with the value 99.6% estimated internally using VIPERS repeated observations. For the flags 2 and 9 together we instead obtain a confidence level of 90.6%, against the higher confidence, 98.4%, estimated from the repeated VIPERS observations.
Conversely, if we assume the P(X) obtained from the VIPERS internal comparison, using Eq. (8) we can obtain an estimate of the VVDS flag 3,4 confidence level. The resulting confidence level for VVDS flags 3,4 is 98%.
Comparison to PRIMUS. W1 is also one of the areas
selected by the PRIMUS survey (Cool et al. 2013).
Using only the PRIMUS reliable objects (PRIMUS flag 3 and 4), there are 2495 objects for
which VIPERS measures a reliable redshift (flag 2 through 9) in VIPERS. For this
comparison, we consider two measurements to be concordant when
 ,
where σzPRIMUS = 0.003 for PRIMUS flag = 4
and σzPRIMUS = 0.015 for PRIMUS flag = 3
(Cool et al. 2013).
,
where σzPRIMUS = 0.003 for PRIMUS flag = 4
and σzPRIMUS = 0.015 for PRIMUS flag = 3
(Cool et al. 2013).
The results are shown in the bottom part of Table 2. Both redshift classes considered (Flags 3+4 and 2+9) give slightly smaller confidence level, when compared to PRIMUS. The problem in interpreting these results is whether the confidence levels corresponding to the PRIMUS flag system are similar to those of VIPERS or VVDS. We note that PRIMUS spectra have a coarser resolution than VIPERS ones, with R degrading from 100 to 20 from blue to red. Taking this into account, the agreement of the Flag 3+4 classes for the two data sets is very good. In particular, the difference in the results in the first lines (Flags 3,4 vs. 3,4) for the “VIPERS Internal” and “VIPERS vs. PRIMUS” cases in the Table is probably more a test for the PRIMUS best redshifts, rather than for VIPERS.
As we did for the VVDS case, we can obtain an estimate of the PRIMUS flag 3,4 confidence level assuming that VIPERS flags confidence level is 99.5% (as obtained from the internal comparison). The confidence level of 91.75% we obtain is in very good agreement with the value quoted by Cool et al. (2013).
Overall, the consistency of the estimates performed internally (top) and with VVDS (middle), indicates that redshifts for Flags 3+4 in VIPERS should have a 99% confidence of being correct, while class 2+9 is expected to have a confidence level of at least 90%, probably close to 95%. If we compare these confidence levels to those indicated in the original prescriptions for the flag assignments, summarized in Sect. 4.3, we see that in particular for the Flag 2 objects the actual redshifts are more reliable than expected.
VIPERS detection rate.
VIPERS redshift flag distribution.
5. The VIPERS PDR-1 sample
We define the observed target sampling rate as the ratio between the observed target objects and all possible targets within the spectroscopic area. The detection rate is the percentage of detected targets over observed targets, while the redshift measurement success rate and reliable measurement success rate are the fraction of measured and reliably measured objects over the detected ones. The X-ray AGN candidates are excluded from this computation, as they are put in masks as compulsory objects (see Sect. 2.2), and as such follow a different selection function. In Table 3 we show some basic statistics of the VIPERS PDR-1 spectroscopic sample, split for W1 and W4, and for epoch 1 and epoch 2 data. Numbers in parenthesis indicate the fractions of the different spectroscopic flags. So far, we have observed 63 942 objects (62 862 targets plus 1080 serendipitous objects) with a detection rate of 96%. The detection rate shows no difference between W1 and W4, nor between epoch 1 and epoch 2 data (see Sect. 3). The fraction of measured redshift, as well as of reliable redshift is satistically higher for epoch 2 data, confirming the better quality of the data acquired after VIMOS refurbishing. Table 3 reveals the excellent quality of VIPERS spectroscopic data: globally the redshift measurement success rate is 94%. 81% of the objects have a reliable redshift, with 58% of the redshift with a confidence level higher than 99% (flag 3 and 4). In the last two rows in Table 3 we show the detection rate and redshift measurement rate split into epoch 2a, when no flexure compensation was active during exposures, and epoch 2b, when the active flexure compensator was working correctly. The identical detection and measurement rates demonstrate that our reduction pipeline has successfully recovered for this effect.
 |
Fig. 8 Fraction of redshift flags as from Table 4: filled points for the full sample, open red squares for the W1 sample, red crosses for the W4 sample, blue open circles and stars for epoch 1 and epoch 2 samples respectively. W1 and W4 points as well as epoch 1 and epoch 2 points have been shifted along the x axis for clarity. |
Table 4 and Fig. 8 show the percentage of the various redshift flags. For the purpose of this table and figure, the distinction between AGN and galaxies/stars has been neglected so that flags 1.x include also flags 11.x, flags 2.x include flags 12.x, and so on. The better quality of epoch 2 data is clearly demonstrated by the much lower fraction of flags 0 (which decreases from 9% to 4%) and 1 (decreasing from 19% to 11%), and the much higher fraction of flags 4 (rising from 24% to 37%).
Figure 9 shows the overall sampling of the VIPERS survey as a function of magnitude. The observed target sampling rate (top panel, empty histogram) is remarkably stable, demonstrating that our target selection criterion is not flux dependent. Fainter than iAB ~ 19.5 the detection rate (top panel, shaded histogram) is constant around 45%. The slight decrease we observe at brighter magnitudes is probably due to the short slits affecting the extraction of the brighter objects. We emphasise that such a decrease remains within the uncertainties but for the very first magnitude bin and we are currently revising the spectra extraction procedure to ameliorate this effect. Conversely, there is a clear (albeit small) trend for redshift measurement success rate to diminish with increasing object flux (bottom panel, empty histogram): in the last half-magnitude bin the fraction of objects for which a redshift measurement is available drops from 93% to 88%. This drop becomes even more dramatic when only reliable measurements are considered (bottom panel, shaded histogram). In Sect. 6 we will illustrate how it is possible to account for these effects statistically when using the VIPERS spectroscopic sample.
 |
Fig. 9 Top: observed target sampling rate (empty histogram), and detection rate (shaded histogram) for the VIPERS survey targets. Bottom: redshift measurement success rate (empty histogram), and reliable measurement success rate (shaded histogram) targets. Error bars are indicated for shaded histogram only for clarity. |
5.1. Redshift distribution
 |
Fig. 10 Redshift distribution for the VIPERS survey. Top: all objects, middle: only galaxies; bottom: only AGN. The smaller insets zoom on the high redshift tail. The histograms include secondary objects. Empty histograms are for all measured objects, shaded histogram for reliably measured redshifts. |
VIPERS measured redshift for stars galaxies and AGN.
Table 5 shows the number of target and serendipitous stars, galaxies and AGN, considering all measurements or only reliable (flags 9.x,2.x,3.x,4.x) redshifts. The stellar contamination is impressively low (~4%), demonstrating that the adopted criterion for excluding stars from the sample works well. The higher number of stars in the W4 area reflects the lower galactic latitude of this field with respect to W1 (−44 degrees and −57 degrees respectively). Figure 10 shows the redshift distribution for the whole VIPERS sample (top panel), the galaxy sample (middle panel) and the AGN sample (bottom panel). The observed redshift distribution shows that our selection criterion works well in excluding low redshift galaxies. As expected, the highest redshift tail is made up of AGN, while only a handful of galaxies have a redshift above 1.2.
6. Survey selection function: masks and weights
The survey selection function quantifies the actual probability that a galaxy with given properties at a given position on the sky is actually observed by VIPERS. This can be a binary probability, as implied by the global survey geometry and instrumental footprint, or a more complex function of position on the sky (as e.g. introduced by a varying sampling rate due to the limited number of slits that can be accommodated in each quadrant). In more detail, it can include a continuous function that depends in general on the galaxy flux, colour, spectral properties and redshift. The accurate knowledge of the actual selection function resulting from all these effects allows us to define a set of weights to be applied to each galaxy. These are used to renormalize the observed density and two-point statistics to those one would ideally obtain from a statistically complete sample. In this section we shall describe in some detail how the different contributions have been estimated and encapsulated into a set of masks and weights describing the VIPERS selection function, which are provided to the general user together with the data release. These same masks and weights have been used, for example, in the estimate of the VIPERS mass and luminosity functions (Davidzon et al. 2013; Fritz et al. 2013) and in the clustering studies of de la Torre et al. (2013) and Marulli et al. (2013), where further details can be found.
6.1. Photometric and spectroscopic masks
First, we consider selection effects arising from the CFHTLS parent catalogue. The photometric survey is not free from defects and there exist a small number of gaps due to failed observations and artefacts associated with bright stars that affect the VIPERS area. These regions are treated as holes in the survey and are described by a photometric mask.
The area surveyed by the spectroscopic observations may be described by the geometry of the VIMOS footprint and the lay-out of the observed pointings. Although the instrument geometry is fixed from night to night, particular observing conditions can modify the effective area. For instance, in certain observing configurations, a VIMOS quadrant may be partially obscured by the telescope guider arm. We have reconstructed the precise geometry of each quadrant and recorded it as a polygon. The combination of such polygons defines a second binary mask, which allows a precise reconstruction of the overall survey footprint on the sky. The construction of the photometric and survey masks is described in detail in Guzzo et al. (2013).
The application of the two masks to the whole target catalogue (see Sect. 2) defines what in the following we call the parent sample.
6.2. Target sampling rate
Only ≃45% of the available targets in the parent sample may be assigned a slit and observed according to the slit-assignment strategy. The galaxy target sampling rate (TSR) is defined as the fraction of candidate galaxies (according to our selection criterion, see Sect. 2) in the parent sample for which a spectrum has been acquired. Note that this is slightly different from the target detection rate shown in Fig. 9 and Table 3, where also AGN candidates were considered. The TSR is both a function of angular position on the sky and apparent flux.
As for all multi-object spectrographs, the TSR varies with location on the sky, depending on the fluctuations in the surface density of objects. In particular, the single pass strategy of VIPERS generates a proximity bias, in which galaxy close pairs are disfavoured. This is particularly relevant in two-point statistical studies, e.g. for two-point correlation functions, for which a specific correction based on the angular clustering of the measured and parent samples has to be applied (de la Torre et al. 2013). The TSR as defined here (indicated as TSR(Q) in the following) maps the quadrant to quadrant variations in the target sampling.
Given the way we have built the spectroscopic masks (see Sect. 2), the TSR is expected to be independent of the target apparent selection magnitude. Still, a very slight magnitude dependence exists at very bright magnitudes (see Fig. 9, top panel). This can be due either to the higher angular clustering of the brightest objects, or to the short slits which may disfavour the very largest objects (see Sect. 3), or to a combination of both effects. The TSR used in published papers (and distributed as part of this release) takes this effect into account: see Davidzon et al. (2013), Fritz et al. (2013) for details.
6.3. Spectroscopic success rate
The spectroscopic success rate (SSR) is defined as the fraction of measured candidate galaxy targets with a reliable (flag 2,3,4,9) galaxy redshift measurement over all the detected galaxy targets. As for the TSR, this is slightly different from the reliable measurements success rate shown in Fig. 9 and Table 3, where we have included also AGN candidates. The SSR is clearly sensitive to both the observing conditions and the apparent magnitude. A second order dependence on spectral type and redshift is usually present, as, at a given magnitude, it can be easier to measure redshifts for strong emission line galaxies, if the emission lines fall within the observed wavelength range.
In the clustering analysis of de la Torre et al. (2013), the angular dependence of the SSR (SSR(Q)) was estimated as a function of VIMOS quadrant as the ratio between the number of reliable redshift (flag 2. ∗ ≤ zflag ≤ 9. ∗) and the total number of measured targets. The average SSR(Q) value is typically >80%, falling to 50% for quadrants observed in particularly poor conditions.
Note that, in principle, one can expect angular variations of the TSR and SSR on scales smaller than those of a single quadrant, for example due to the proximity bias discussed in the previous section or to an imperfect centring of the objects in the slit due to optical distortions. These effects cannot be viewed purely as a position-dependent probability of obtaining a redshift. This means that for some specific analyses, a more sophisticated treatment of these effects may be required, as discussed in de la Torre et al. (2013). The various information we provide within PDR-1 should in general allow such higher level of refinement, if required.
In the case of statistical analyses which are not sensitive to the angular position of objects, it is possible to disentangle the dependence of SSR on apparent magnitude and redshift using the full VIPERS sample and use only the SSR(mag,z) completeness weights (Davidzon et al. 2013; Fritz et al. 2013). The SSR(mag,z) has been estimated by computing the ratio of the number of successful galaxy redshift to the total number of detected galaxy targets per magnitude and redshift bins. However, it is important to note that the SSR(mag,z) corresponds to the SSR averaged over all quadrants and cannot be used simultaneously with the SSR(Q) previously defined, which instead corresponds to the averaged SSR over the magnitude and redshift distributions in a given quadrant.
6.4. Colour sampling rate
The colour sampling rate (CSR) defines the completeness of galaxies detected in spectroscopy with respect to a purely i′ < 22.5 magnitude-limited sample. It accounts for the missed galaxies at the boundaries of the colour-based redshift selection criterion. Such incompleteness affects only galaxies with redshift close to the nominal lower limit of z ≃ 0.5. The adopted colour criteria were in fact calibrated using the purely flux limited data of the VVDS survey (Guzzo et al. 2013). These calibration tests show that in the (r − i) vs (u − g) plane, the distance of a galaxy from the adopted threshold is a monotonic function of redshift. As such, the CSR is expected to be close to a step function changing from 0 to 1 around the nominal redshift threshold of z = 0.5.
To compute the CSR, we have used the VVDS Deep and Wide datasets, which not only are
purely flux limited surveys but also share the same CFHTLS photometry of
VIPERS. The result is shown in Fig. 11. The measured
CSR points are well described by ![Mathematical equation: \begin{equation} \label{CSReq} {\rm CSR}(z)=0.5-0.5\,{\rm erf}[b (z_{\rm t}-z)], \end{equation}](/articles/aa/full_html/2014/02/aa22790-13/aa22790-13-eq129.png) (9)where erf is the
error function, b = 10.8 and zt = 0.44.
Compared to the VVDS data points, this fitting function only slightly overestimates the
CSR (and therefore underestimates the weight) for galaxies at redshift
z = [0.55,0.6]. Comparison of the CSR obtained in
this way to that obtained using photometric redshifts (therefore using a much larger
number of galaxies), shows a very good agreement, as visible in Fig. 11.
(9)where erf is the
error function, b = 10.8 and zt = 0.44.
Compared to the VVDS data points, this fitting function only slightly overestimates the
CSR (and therefore underestimates the weight) for galaxies at redshift
z = [0.55,0.6]. Comparison of the CSR obtained in
this way to that obtained using photometric redshifts (therefore using a much larger
number of galaxies), shows a very good agreement, as visible in Fig. 11.
 |
Fig. 11 Colour sampling rate (CSR) for the VIPERS spectroscopic sample. Dashed line and dots: the CSR as computed from the VVDS sample; dotted line: the functional fit; solid lines: CSR computed from the photometric sample for blue and red galaxies. The shaded area underlines the redshift range where the CSR has to be applied. |
We also checked whether passive and active galaxies show a different CSR, by splitting the sample on the basis of either the NUVrK diagram or the U − B bimodality (Fritz et al. 2013). As no significant difference has been found, we concluded that the only relevant dependence of the CSR is the one on redshift.
The final weight to be assigned to a given galaxy will be the product of the three
weights mentioned above, i.e.
 In the case of angular position-dependent statistics,
such as the two-point correlation function, the primary weights to be used are the TSR(Q)
and SSR(Q) and the other dependences and possible corrections have to be studied in more
details on a case-by-case basis (see de la Torre et al.
2013).
In the case of angular position-dependent statistics,
such as the two-point correlation function, the primary weights to be used are the TSR(Q)
and SSR(Q) and the other dependences and possible corrections have to be studied in more
details on a case-by-case basis (see de la Torre et al.
2013).
In Sect. 8 we explain how to get access to the survey masks and weights.
7. VIPERS spectra
Figure 12 shows a few examples of VIPERS spectra, for galaxies with different redshift and reliability flag. All spectra have been normalized to the object iAB magnitude (see Sect. 4).
 |
Fig. 12 Some representative VIPERS spectra: first column for mid-brightness objects, right column for objects close to the survey magnitude limit (iAB = 22.5). Redshift reliability flags range from highest reliable (flag 4.5, first row) to least reliable (flag 1.5, 4th row). In the last row we show two AGN spectra. |
7.1. Spectral feature measurements
Given the redshift distribution and the wavelength coverage of the VIPERS survey, the
strongest spectral features which can be measured are the Balmer break and the most
prominent emission lines, namely [OII], [OIII] doublet, [Hβ] and
[Hα]. The Balmer break (D4000n) has been
computed as the ratio between the mean flux measured over the 4000–4100 Å range and the
3850–3950 Å range (Balogh et al. 1999). The error on
the D4000n break is computed by propagating the error on the
two means. Measurement of line fluxes can be performed in various ways: from the simplest
pure flux integration below the line, to the most sophisticated approaches, which attempt
to take into account the absorption component of the Balmer lines. The latter approach is
particularly indicated when the purpose is to derive a precise estimate of the gas
component, for example in all studies involving metallicity measurements. Our first aim is
to separate emission line galaxies from non emission line galaxies, and for this reason we
have chosen the simplest approach of pure flux integration below the line. All
computations are done in counts and converted into fluxes using the counts-to-flux
conversion factor derived from the instrument sensitivity function. For each line, a local
continuum per pixel unit is computed as the mean of the counts in two regions redwards and
bluewards of the line:  (10)where
Ci are the counts in pixel i and NcontPix
are the pixels within the blue and red wavelength ranges used for the continuum
computation. The error on the continuum level is computed using the noise spectrum
associated to each source (see Eq. (5)):
(10)where
Ci are the counts in pixel i and NcontPix
are the pixels within the blue and red wavelength ranges used for the continuum
computation. The error on the continuum level is computed using the noise spectrum
associated to each source (see Eq. (5)):
 (11)where
s2 is the continuum variance. The line counts are obtained
integrating the continuum-subtracted counts in the defined line region
(11)where
s2 is the continuum variance. The line counts are obtained
integrating the continuum-subtracted counts in the defined line region
 (12)and their
error
(12)and their
error  (13)where
NL are the pixels within the line region. Table 6 gives the line and continuum boundaries we have used for the different
features we have measured.
(13)where
NL are the pixels within the line region. Table 6 gives the line and continuum boundaries we have used for the different
features we have measured.
Spectral feature parameters.
7.2. Spectroscopic properties
 |
Fig. 13 Balmer break distribution for the subsample of flag 3 and 4 VIPERS galaxies. |
 |
Fig. 14 [OII] line flux vs. Balmer break amplitude density plot for the subsample of flag 3 and 4 VIPERS galaxies. Colour coding ranges from black to red with decreasing density. |
Spectroscopic information can be used to subdivide galaxies into different classes. In Fig. 13 we show the distribution of the D4000n break amplitude for the subsample of flag 3 and 4 galaxies: its bimodality is evident. This figure is qualitatively identical to the bimodality plots presented in Fritz et al. (2013), which are based on the galaxy rest-frame U − V colour. In Fig. 14 we plot the [OII] flux as a function of the D4000n break value for the same galaxy subset. In this Figure, the division into two large groups of galaxies is even more evident: most of the galaxies with a D4000n break larger than 1.5 have no or little sign of emission lines (or on-going star formation), while galaxies with strong on-going star formation are younger (i.e. have a lower D4000n break). A deeper classification of galaxies on the basis of spectral properties will be the subject of future work; here we restrict ourselves to investigating how the spectral features listed in Table 6 relate to other classification schemes used within the VIPERS project.
 |
Fig. 15 [OII] line flux vs. Balmer break amplitude for the subsample of flag 3 and 4 VIPERS galaxies by SED type: type 1, top left; type 2, top right, type 3 bottom left, type 4 bottom right. Colour coding as in Fig. 14 |
In Davidzon et al. (2013) an SED-based classification was proposed: according to the best fitting template, galaxies were divided into four SED types, where type 1 are red, old and supposedly quiescent galaxies, while type 4 are the bluest and most active galaxies. In Fritz et al. (2013) it is shown how, using this classification, type 1 galaxies define fairly well the red sequence in the colour magnitude diagram. We would expect type 1 galaxies to show no (or very little) sign of star formation activity. Figure 15 shows how the different SED type galaxies cluster in the D4000n −[OII] flux plane. Although on average type 1 galaxies show no sign of star formation, for 30% of them we detect significant (at least 3σ) [OII] emission. Conversely, type 4 galaxies totally dominate the high [OII] flux tail, and never show a prominent Balmer break. In other words, the SED based classification is rather efficient in isolating highly star forming galaxies (type 4), but the earlier type galaxies thus selected are not necessarily quiescent.
 |
Fig. 16 PCA galaxy classification plane, with Balmer break amplitude shown in colours. |
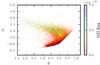 |
Fig. 17 PCA galaxy classification plane, with [OII] line flux shown in colours. |
A different approach was taken in Marchetti et al. (2013), where a Principal Component Analysis has been used to derive the first three eigen-coefficients, and a group-finding algorithm has been applied on the resulting θ − φ diagram, dividing galaxies into 15 different groups: groups from 1 to 8 comprise the classical types from E to Sc, while group from 9 to 15 comprise the more active starburst galaxies. In Fig. 16 we show the PCA θ − φ diagram with galaxies in different colours according to their value of Balmer break. We can see that for galaxies showing D4000n higher than 1.5, the break amplitude is well correlated with the φ parameter. This is consistent to the classification proposed in Marchetti et al. (2013), who indicate this part of the diagram as beeing populated by the earlier galaxy types. Figure 17 relates the PCA θ − φ parameters with the flux of the [OII] emission line. The strongest emission line galaxies populate the locus of the starburst galaxies, as identified by the PCA classification. Galaxies in the locus of mid and late spirals (θ > 1.6 and φ > 0) do not seem to be strong [OII] emitters. This could partly be due to the limit on [OII] flux detection, and a more accurate analysis taking into account line detection upper limits will be done. Overall, there is a good agreement between the PCA based classification and the measured spectral features in identifying the extreme galaxies (early types or Starbusts). This is not surprising, as PCA itself is based on spectral decomposition, and confirms the validity of the PCA approach. However we note that a one to one correspondance between PCA parameters and spectral features would not be appropriate, as the PCA takes into account the full spectral shape. Neither line flux nor Balmer break alone can predict the overall SED accuracy as PCA can do.
It is beyond the scope of this paper to attempt a galaxy classification scheme based solely on spectral features. In a forthcoming paper we will further develop the subject of galaxy classification, quantitatively comparing the different possible schemes.
7.3. Global spectral properties
Spectral feature parameters.
The VIPERS spectral resolution R ~ 250 allows us to study individual spectroscopic properties only for galaxies with the highest signal to noise ratio. On the other hand, the high statistics provided by the VIPERS galaxy sample allows to define different galaxy groups (according to the scientific problem one may want to address), make high quality stacked spectra for each group and perform spectral measurement which would be impossible on the single objects. As an example, we have divided VIPERS very reliable galaxies (flag 3 and 4) according to the amplitude of the Balmer break and [OII] flux. Table 7 shows the D4000n and [OII] flux limits we have used for each group, as well as the number of spectra pertaining to that group. We have stacked together the rest frame spectra within each group, and the result is shown in Fig. 18. This kind of high quality observed spectra of galaxies at medium redshift can be useful in cross-correlation algorithms, in conjunctions with or alternative to synthetic templates or the classical low redshift templates from Kennicutt (1992), and for this reason we include them in the distributed products. More detailed studies of the spectroscopic properties of VIPERS galaxies making use of stacked spectra are currently ongoing.
 |
Fig. 18 VIPERS rest-frame stacked spectra for different galaxy groups according to spectral feature strength. Vertical lines indicate location of the strongest features, dotted for emission and dashed for absorption lines. |
8. Public data release and database access
The data of the first VIPERS Public Data Release (PDR-1) are available at http://vipers.inaf.it. The release comprises:
-
Spectroscopic catalogue, described in Table 8.
-
Parent photometric catalogue, described in Table 9. It contains all sources in the CFHTLS catalogue falling within the surveyed area and having iAB < 24.0.
-
Photometric masks, as described in Guzzo et al. (2013). The photometric mask marks regions of the VIPERS survey in which the target selection may be affected by poor photometric quality in the parent CFHTLS catalogue. These regions should be excluded from scientific analyses. The fraction of the area lost is 2.4% for the W1 field and 3.0% for the W4 field. The photometric mask is provided separately for the two VIPERS fields W1 and W4. The data files follow the DS9 Region format version 4.1 and use the polygon data structure.
-
Spectroscopic masks, as described in Guzzo et al. (2013). These masks, together with the photometric ones, should be used to determine the angular selection function of the survey. The masks are provided as a set of DS9 Region files (version 4.1). Each pointing in the survey consists of 4 quadrants and each quadrant is stored in a polygon data structure. Masks are provided for W1 and W4 separately, as well as for each single quadrant.
-
Quadrant dependent TSR and SSR as described in Sect. 6, provided in the form of two separate ASCII tables. In each table, the columns correspond to: pointing name, quadrant number, TSR (or SSR) value. The details on how these have been computed are given in de la Torre et al. (2013). The value of the TSR in each quadrant is the average of the TSR over the apparent magnitude distribution within the quadrant.
-
Stacked spectra, as shown in 7.3, in both ASCII and fits format.
A detailed description of each quantity is provided in the distributed catalogues. We note that with respect to the data used in previous VIPERS papers, in PDR-1 ~0.5% of the redshifts have changed due to a deeper look into the more problematic spectra. As a consequence, for this release we have re-computed also the TSR, SSR and CSR. However we underline that these differences are too small to affect the scientific results contained in previous papers.
A full release of the one dimensional fully calibrated spectra, together with the spectroscopic features measurements, is foreseen in 2014.
Catalogues are distributed in three different forms:
-
A single tar file containing the full release.
-
A web interface connected to the VIPERS (see next section) database (free registration required), which allows to perform SQL selections through an ergonomic, easy to use interface.
-
At a later stage, data will also be queryable via the Virtual Observatory.
Spectral catalog contents.
Photometric catalog contents.
8.1. VIPERS database web interface
The WEB interface to the VIPERS data base allows one to perform queries using a confortable User Interface. Once logged in, the user is presented with the list of tables to be queried. Queries can be applied to a single table, or to a combination of tables: if more than one table is selected, the query can be conducted either in parallel and independently on each of the tables, or joining all tables, using the object ID as joining field. Extensive information on the content of each table can be accessed by clicking on the table name, while generic help on the usage of the interface is available clicking on the HELP button on the left.
Queries can be of type Simple or Advanced. The Simple query allows one to select all objects within a sky region (query by Position) or to retrieve objects within a user specified list (query By Input List), or to select objects satisfying simple selection conditions (query By Parameters). The By Parameter form allows one to set many selection conditions as ranges, equality or likeness, for example extragalactic objects (zspec > 0) with a secure redshift flag (zflg between 2 and 10) observed in epoch 2. Conditions can be imposed on any column of the selected tables and all the conditions are joined together with an AND syntax. The Advanced query panel page has been thought to provide a more flexible tool for expert users. It allows to insert formulas in the selection statement, to define the selection condition in a customizable complex way, to sort the output using a specified data column order and it also allows one to limit the result output.
The query output page allows one to directly inspect the query results, to make simple simple plots for quick statistical inspection of the results and to save results into ASCII files, VOTables or FITS binary tables.
9. Summary
We have presented here the first first Public Data Release (PDR-1) of the VIPERS survey, which includes 57 204 spectroscopic measurements of galaxies, AGN and stars. Complementing the general description given in Guzzo et al. (2013), we have discussed the details of the target selection, observations, data reduction and redshift measurements, providing all relevant information for a proper use of the data. This includes the photometric and angular selection functions, as well as the weighting schemes to be adopted to correct for the survey incompleteness.
Both internal tests and comparison with external redshifts indicate a high reliability of the bulk of the VIPERS redshift data: redshifts classified as Flags 3 and 4 (33 102 objects) in our internal grading system show a confidence level of 99% in their value, while that of the combined Flags 2 and 9 (49 087 objects) is >90%. Using more than 1500 objects with repeated observations, we have estimated a redshift rms error of 0.00047(1 + z) and shown that this value does not vary significantly along the different Flag classes considered as reliable (i.e. 2, 3, 4 and 9). The overall stellar contamination of the galaxy target sample is found to be smaller than 3%, confirming the goodness of our original star-galaxy separation.
To provide hints on the global spectroscopic quality of the VIPERS data, we have presented first measurements of some basic spectral features, as the Balmer break index and the strength of the [OII] λ3727 line. We have also included first comparisons of these spectroscopic markers of mean stellar age and star formation rate to galaxy classification schemes used in other VIPERS papers. This clearly shows the huge potential of this data set for statistical studies of the galaxy population at an average redshift z ~ 0.8, an epoch where VIPERS (already with this PDR-1), provides a significant leap in terms of number of galaxies and volume.
The full spectroscopic catalogues, together with the complementary photometric information, survey masks and weights are publicly available from http://vipers.inaf.it. A full release of the corresponding PDR-1 spectra is planned to take place in 2014.
As above, two redshift measurements are defined to be “in agreement” when their difference Δ/(1 + z) < 3σz ≃ 0.0025.
Acknowledgments
We acknowledge the crucial contribution of the ESO staff in the management of service observations. In particular, we are deeply grateful to M. Hilker for his constant help and support of this programme. We thanks an anonymous referee for the useful comments and suggestions. Italian participation in VIPERS has been funded by INAF through PRIN 2008 and 2010 programmes. L.G. and B.R.G. acknowledge support of the European Research Council through the Darklight ERC Advanced Research Grant (# 291521). O.L.F. and L.A.M.T. acknowledge support of the European Research Council through the EARLY ERC Advanced Research Grant (# 268107). Polish participants have been supported by the Polish National Science Centre (grants N N203 51 29 38 and 2012/07/B/ST9/04425), the Polish-Swiss Astro Project (co-financed by a grant from Switzerland, through the Swiss Contribution to the enlarged European Union), the European Associated Laboratory Astrophysics Poland-France HECOLS and a Japan Society for the Promotion of Science (JSPS) Postdoctoral Fellowship for Foreign Researchers (P11802). GDL acknowledges financial support from the European Research Council under the European Community’s Seventh Framework Programme (FP7/2007-2013)/ERC grant agreement n. 202781. W.J.P. and R.T. acknowledge financial support from the European Research Council under the European Community’s Seventh Framework Programme (FP7/2007-2013)/ERC grant agreement n. 202686. W.J.P. is also grateful for support from the UK Science and Technology Facilities Council through the grant ST/I001204/1. E.B., F.M. and L.M. acknowledge the support from grants ASI-INAF I/023/12/0 and PRIN MIUR 2010-2011. Y.M. acknowledges support from CNRS/INSU (Institut National des Sciences de l’Univers) and the Programme National Galaxies et Cosmologie (PNCG). C.M. is grateful for support from specific project funding of the Institut Universitaire de France and the LABEX OCEVU. The TOPCAT software (Taylor 2005) has been widely use for this paper.
References
- Abazajian, K., Adelman-McCarthy, J. K., Agüeros, M. A., et al. 2003, AJ, 126, 2081 [Google Scholar]
- Abbas, U., de la Torre, S., LeFèvre, O., et al. 2010, MNRAS, 406, 1306 [NASA ADS] [Google Scholar]
- Anderson, L., Aubourg, E., Bailey, S., et al. 2012, MNRAS, 427, 3435 [Google Scholar]
- Arnouts, S., & Ilbert, O. 2011, LePHARE: Photometric Analysis for Redshift Estimate, astrophysics Source Code Library [Google Scholar]
- Balogh, M. L., Morris, S. L., Yee, H. K. C., Carlberg, R. G., & Ellingson, E. 1999, ApJ, 527, 54 [NASA ADS] [CrossRef] [Google Scholar]
- Bel, J., Marinoni, C., Granett, B., et al. 2013, A&A, submitted [arXiv:1310.3380] [Google Scholar]
- Blake, C., Brough, S., Colless, M., et al. 2011a, MNRAS, 415, 2876 [NASA ADS] [CrossRef] [Google Scholar]
- Blake, C., Davis, T., Poole, G. B., et al. 2011b, MNRAS, 415, 2892 [NASA ADS] [CrossRef] [Google Scholar]
- Bottini, D., Garilli, B., Maccagni, D., et al. 2005, PASP, 117, 996 [NASA ADS] [CrossRef] [Google Scholar]
- Colless, M., Dalton, G., Maddox, S., et al. 2001, MNRAS, 328, 1039 [NASA ADS] [CrossRef] [Google Scholar]
- Cool, R. J., Moustakas, J., Blanton, M. R., et al. 2013, ApJ, 767, 118 [NASA ADS] [CrossRef] [Google Scholar]
- Coupon, J., Ilbert, O., Kilbinger, M., et al. 2009, A&A, 500, 981 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Davidzon, I., Bolzonella, M., Coupon, J., et al. 2013, A&A, 558, A23 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Davis, M., Faber, S. M., Newman, J., et al. 2003, in Discoveries and Research Prospects from 6- to 10-Meter-Class Telescopes II. ed. G. Puragra, Proc. SPIE, 4834, 161 [Google Scholar]
- de la Torre, S., Guzzo, L., Kovač, K., et al. 2010, MNRAS, 409, 867 [NASA ADS] [CrossRef] [Google Scholar]
- de la Torre, S., Guzzo, L., Peacock, J. A., et al. 2013, A&A, 557, A54 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Drinkwater, M. J., Jurek, R. J., Blake, C., et al. 2010, MNRAS, 401, 1429 [Google Scholar]
- Driver, S. P., Hill, D. T., Kelvin, L. S., et al. 2011, MNRAS, 413, 971 [NASA ADS] [CrossRef] [Google Scholar]
- Eisenstein, D. J., Weinberg, D. H., Agol, E., et al. 2011, AJ, 142, 72 [Google Scholar]
- Fritz, A., Scodeggio, M., Ilbert, O., et al. 2013, A&A, submitted [Google Scholar]
- Garilli, B., Le Fèvre, O., Guzzo, L., et al. 2008, A&A, 486, 683 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Garilli, B., Fumana, M., Franzetti, P., et al. 2010, PASP, 122, 827 [NASA ADS] [CrossRef] [Google Scholar]
- Garilli, B., Paioro, L., Scodeggio, M., et al. 2012, PASP, 124, 1232 [NASA ADS] [CrossRef] [Google Scholar]
- Giavalisco, M., Ferguson, H. C., Koekemoer, A. M., et al. 2004, ApJ, 600, L93 [NASA ADS] [CrossRef] [Google Scholar]
- Goranova, Y., Hudelot, P., Magnard, F., et al. 2009, http://terapix.iap.fr/cplt/table_syn_T0006.html [Google Scholar]
- Granett, B. R., Guzzo, L., Coupon, J., et al. 2012, MNRAS, 421, 251 [NASA ADS] [Google Scholar]
- Guzzo, L., Pierleoni, M., Meneux, B., et al. 2008, Nature, 451, 541 [NASA ADS] [CrossRef] [PubMed] [Google Scholar]
- Guzzo, L., Scodeggio, M., Garilli, B., et al. 2013 [arXiv:1309.2623] [Google Scholar]
- Hammersley, P., Christensen, L., Dekker, H., et al. 2010, The Messenger, 142, 8 [NASA ADS] [Google Scholar]
- Horne, K. 1986, PASP, 98, 609 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Ilbert, O., Arnouts, S., McCracken, H. J., et al. 2006, A&A, 457, 841 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Kennicutt, Jr., R. C. 1992, ApJS, 79, 255 [NASA ADS] [CrossRef] [Google Scholar]
- Koo, D. 1995, in Wide Field Spectroscopy and the Distant Universe, ed. S. J. Maddox, & A. Aragon-Salamanca, 55 [Google Scholar]
- Le Fèvre, O., Hudon, D., Lilly, S. J., et al. 1996, ApJ, 461, 534 [NASA ADS] [CrossRef] [Google Scholar]
- Le Fèvre, O., Saisse, M., Mancini, D., et al. 2003, in Proc. SPIE, eds. M. Iye, & A. F. M. Moorwood, 4841, 1670 [Google Scholar]
- LeFèvre, O., Vettolani, G., Garilli, B., et al. 2005, A&A, 439, 845 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Le Fèvre, O., Cassata, P., Cucciati, O., et al. 2013, A&A, 559, A14 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Li, C., Kauffmann, G., Jing, Y. P., et al. 2006, MNRAS, 368, 21 [NASA ADS] [CrossRef] [Google Scholar]
- Lilly, S. J., Le Fèvre, O., Renzini, A., et al. 2007, ApJS, 172, 70 [NASA ADS] [CrossRef] [Google Scholar]
- Lilly, S. J., Le Brun, V., Maier, C., et al. 2009, ApJS, 184, 218 [Google Scholar]
- Madgwick, D. S., Hawkins, E., Lahav, O., et al. 2003, MNRAS, 344, 847 [NASA ADS] [CrossRef] [Google Scholar]
- Małek, K., Solarz, A., Pollo, A., et al. 2013, A&A, 557, A16 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Marchetti, A., Granett, B. R., Guzzo, L., et al. 2013, MNRAS, 428, 1424 [NASA ADS] [CrossRef] [Google Scholar]
- Marulli, F., Bolzonella, M., Branchini, E., et al. 2013, A&A, 557, A17 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Norberg, P., Baugh, C. M., Hawkins, E., et al. 2001, MNRAS, 328, 64 [NASA ADS] [CrossRef] [Google Scholar]
- Norberg, P., Baugh, C. M., Hawkins, E., et al. 2002, MNRAS, 332, 827 [NASA ADS] [CrossRef] [Google Scholar]
- Pierre, M., Chiappetti, L., Pacaud, F., et al. 2007, MNRAS, 382, 279 [NASA ADS] [CrossRef] [Google Scholar]
- Reid, B. A., Samushia, L., White, M., et al. 2012, MNRAS, 426, 2719 [NASA ADS] [CrossRef] [Google Scholar]
- Scodeggio, M., Franzetti, P., Garilli, B., et al. 2005, PASP, 117, 1284 [NASA ADS] [CrossRef] [Google Scholar]
- Scodeggio, M., Franzetti, P., Garilli, B., Le Fèvre, O., & Guzzo, L. 2009, The Messenger, 135, 13 [NASA ADS] [Google Scholar]
- Shepherd, C. W., Carlberg, R. G., Yee, H. K. C., et al. 2001, ApJ, 560, 72 [NASA ADS] [CrossRef] [Google Scholar]
- Steidel, C. C., Adelberger, K. L., Dickinson, M., et al. 1998, ApJ, 492, 428 [NASA ADS] [CrossRef] [Google Scholar]
- Taylor, M. B. 2005, in Astronomical Data Analysis Software and Systems XIV, eds. P. Shopbell, M. Britton, & R. Ebert, ASP Conf. Ser., 347, 29 [Google Scholar]
- White, S. D. M., & Rees, M. J. 1978, MNRAS, 183, 341 [NASA ADS] [CrossRef] [Google Scholar]
- Xia, J.-Q., Granett, B. R., Viel, M., et al. 2012, J. Cosmol. Astropart. Phys., 6, 10 [NASA ADS] [CrossRef] [Google Scholar]
- Zehavi, I., Zheng, Z., Weinberg, D. H., et al. 2005, ApJ, 630, 1 [Google Scholar]
- Zheng, Z., Coil, A. L., & Zehavi, I. 2007, ApJ, 667, 760 [NASA ADS] [CrossRef] [Google Scholar]
All Tables
All Figures
|
Fig. 1 VIPERS survey areas. Black areas are the spectroscopically observed pointings. The thick red line delimits the full area at the survey end. In the current release, some holes due to bad observing conditions are present. Some of them will be filled before the end of the survey. |
| In the text | |
|
Fig. 2 Distribution of the number of slits per VIPERS quadrant. |
| In the text | |
|
Fig. 3 Distribution of seeing values for VIPERS observations. |
| In the text | |
|
Fig. 4 A typical 2D extracted spectrum from epoch 1 data (top) and epoch 2 data (bottom). Wavelength ranges from 5600 Å to 9500 Å from left to right. Spatial direction is along the y axis. |
| In the text | |
|
Fig. 5 Median noise r.m.s. distribution of the VIPERS spectra in the 7500–9100 Å wavelength range. Empty histogram refers to data acquired before VIMOS refurbishment, shaded histogram to those acquired after the refurbishment. |
| In the text | |
|
Fig. 6 Comparison between photometric and spectroscopic secure redshifts in the VIPERS survey. The dashed lines are for zphot = zspec ± 0.15(1 + zs). |
| In the text | |
|
Fig. 7 Distribution of the differences between two independent redshift measurements of
the same object, obtained from a set of 1192 VIPERS galaxies with redshift flag ≥2.
Top: distribution of the velocity differences
Δv = cΔz/(1 + z).
Catastrophic failures, defined as being discrepant by more than
Δz = 6.6 × 10-3(1 + z), have been
excluded. The best-fitting Gaussian has a dispersion of
σ2 = 200 km s-1, corresponding to a
single-object rms error |
| In the text | |
|
Fig. 8 Fraction of redshift flags as from Table 4: filled points for the full sample, open red squares for the W1 sample, red crosses for the W4 sample, blue open circles and stars for epoch 1 and epoch 2 samples respectively. W1 and W4 points as well as epoch 1 and epoch 2 points have been shifted along the x axis for clarity. |
| In the text | |
|
Fig. 9 Top: observed target sampling rate (empty histogram), and detection rate (shaded histogram) for the VIPERS survey targets. Bottom: redshift measurement success rate (empty histogram), and reliable measurement success rate (shaded histogram) targets. Error bars are indicated for shaded histogram only for clarity. |
| In the text | |
|
Fig. 10 Redshift distribution for the VIPERS survey. Top: all objects, middle: only galaxies; bottom: only AGN. The smaller insets zoom on the high redshift tail. The histograms include secondary objects. Empty histograms are for all measured objects, shaded histogram for reliably measured redshifts. |
| In the text | |
|
Fig. 11 Colour sampling rate (CSR) for the VIPERS spectroscopic sample. Dashed line and dots: the CSR as computed from the VVDS sample; dotted line: the functional fit; solid lines: CSR computed from the photometric sample for blue and red galaxies. The shaded area underlines the redshift range where the CSR has to be applied. |
| In the text | |
|
Fig. 12 Some representative VIPERS spectra: first column for mid-brightness objects, right column for objects close to the survey magnitude limit (iAB = 22.5). Redshift reliability flags range from highest reliable (flag 4.5, first row) to least reliable (flag 1.5, 4th row). In the last row we show two AGN spectra. |
| In the text | |
|
Fig. 13 Balmer break distribution for the subsample of flag 3 and 4 VIPERS galaxies. |
| In the text | |
|
Fig. 14 [OII] line flux vs. Balmer break amplitude density plot for the subsample of flag 3 and 4 VIPERS galaxies. Colour coding ranges from black to red with decreasing density. |
| In the text | |
|
Fig. 15 [OII] line flux vs. Balmer break amplitude for the subsample of flag 3 and 4 VIPERS galaxies by SED type: type 1, top left; type 2, top right, type 3 bottom left, type 4 bottom right. Colour coding as in Fig. 14 |
| In the text | |
|
Fig. 16 PCA galaxy classification plane, with Balmer break amplitude shown in colours. |
| In the text | |
|
Fig. 17 PCA galaxy classification plane, with [OII] line flux shown in colours. |
| In the text | |
|
Fig. 18 VIPERS rest-frame stacked spectra for different galaxy groups according to spectral feature strength. Vertical lines indicate location of the strongest features, dotted for emission and dashed for absorption lines. |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.