| Issue |
A&A
Volume 552, April 2013
|
|
|---|---|---|
| Article Number | A64 | |
| Number of page(s) | 11 | |
| Section | Catalogs and data | |
| DOI | https://doi.org/10.1051/0004-6361/201220927 | |
| Published online | 26 March 2013 | |
The catalogue of radial velocity standard stars for Gaia
I. Pre-launch release⋆,⋆⋆
1 LAB UMR 5804, Univ. Bordeaux – CNRS, 33270 Floirac, France
e-mail: This email address is being protected from spambots. You need JavaScript enabled to view it.
2 LUPM UMR 5299 CNRS/UM2, Université Montpellier II, CC 72, 34095 Montpellier Cedex 05, France
3 GEPI, Observatoire de Paris, CNRS, Université Paris Diderot, 5 place Jules Janssen, 92190 Meudon, France
4 Observatoire de Genève, Université de Genève, 51 Ch. des Maillettes, 1290 Sauverny, Switzerland
5 IMCCE, Observatoire de Paris, UPMC, CNRS UMR 8028, 77 Av. Denfert-Rochereau, 75014 Paris, France
Received: 14 December 2012
Accepted: 6 February 2013
Abstract
The Radial Velocity Spectrograph (RVS) on board Gaia needs to be calibrated using stable reference stars known in advance. The catalogue presented here was built for that purpose. It includes 1420 radial velocity standard star candidates selected on strict criteria to fulfil the Gaia-RVS requirements. A large programme of ground-based observations has been underway since 2006 to monitor these stars and verify their stability, which has to be better than 300 m s-1 over several years. The observations were done on the echelle spectrographs ELODIE and SOPHIE on the 1.93-m telescope at Observatoire de Haute-Provence (OHP), NARVAL on the Télescope Bernard Lyot at Observatoire du Pic du Midi and CORALIE on the Euler-Swiss Telescope at La Silla. Data from the OHP and Geneva Observatory archives have also been retrieved as have HARPS spectra from the ESO archive. We provide a mean radial velocity in the SOPHIE scale for each star, derived from the combination of velocities measured with those instruments, after having carefully estimated their differences in zero points. In total, 10214 radial velocity measurements have been obtained for the 1420 stars. With a mean time baseline of 6.35 years, 92.9% of the candidates fulfil a target stability criterion of 300 m s-1. Three hundred forty-three stars are found to be constant at the level of 100 m s-1 over 10 years. Comparisons with earlier catalogues show excellent agreement for FGK stars, with zero-point differences lower than 100 m s-1 and a remarkably low rms scatter of 33 m s-1 in one case, suggesting that the precision of the catalogue presented here is better than this value. This catalogue will likely be useful for other large-scale spectroscopic surveys, such as APOGEE, Gaia-ESO, HERMES, and LAMOST.
Key words: catalogs / stars: kinematics and dynamics
Based on data obtained within the Gaia DPAC (Data Processing and Analysis Consortium) and coordinated by the GBOG (Ground-Based Observations for Gaia) working group, at various telescopes; see abstract.
Full Tables 3 and 4 are only available at the CDS via anonymous ftp to cdsarc.u-strasbg.fr (130.79.128.5) or via http://cdsarc.u-strasbg.fr/viz-bin/qcat?J/A+A/552/A64
© ESO, 2013
1. Introduction
Gaia, the next astrophysical mission of the European Space Agency (ESA), will be launched in 20131. It will survey the entire sky during five years, and measure the positions, proper motions and parallaxes of some 109 stars down to a visual magnitude of 20, with an expected parallax accuracy of 10 to 25 μas at 15th magnitude (de Bruijne 2012). Stars classified as single will have their effective temperature, surface gravity, and metallicity estimated, as well as interstellar extinction.
The Radial Velocity Spectrometer (RVS) on board Gaia will provide radial velocities (RV) of about 150 million stars down to 17th magnitude with precisions ranging from 15 km s-1 at the faint end to 1 km s-1 or better for G and K stars at magnitudes brighter than V ≃ 13.5 (Katz et al. 2004; Katz 2009). The RV, combined with astrometry, will give access to the six dimensions of the phase space useful for kinematical studies. The RVS will also provide rotational velocities and atmospheric parameters for about five million stars down to V ≃ 13 and iron and α-elements abundances for about two million stars down to V ≃ 12. Such a large spectroscopic survey will have a tremendous impact on many science cases, such as the chemistry and dynamics of the Milky Way, the detection and characterization of multiple systems, and variable stars. More details of the expected science yield from the RVS are described in Wilkinson et al. (2005).
The RVS has a resolving power of 11 500 and covers the spectral range 847–874 nm, which includes the near-infrared Caii triplet, many lines of iron and α-elements, and Paschen lines in hot stars. This spectral range has already proven to be very well suited to RV analysis with the RAVE survey (Steinmetz et al. 2006). The RVS is an integral field spectrograph with no entrance slit and no on-board wavelength calibration source. As a consequence, the RVS wavelength dispersion law will be derived from the RVS observations. The instrument will be self calibrated. As explained in Jasniewicz et al. (2011), ground-based radial velocity standards are mandatory for calibrating the wavelength zero point, which otherwise would be mathematically degenerated with the radial velocity scale (i.e. a shift in the wavelength scale can be compensated for by a shift in the RV scale). The Gaia Data Processing and Analysis Consortium (DPAC), and more specifically its Development Unit “Spectrocopic Processing” (Katz et al. 2011), is responsible for establishing the requirements for this external calibration and for the acquisition of the necessary auxiliary data.
In principle asteroids are excellent sources for calibrating the zero point because their radial velocity can be derived from celestial mechanics with uncertainties lower than 1 m s-1. However, they cannot be the main reference sources for Gaia because they are not numerous enough in the appropriate magnitude range and their sky distribution is limited to the Ecliptic Plane.
When we started to search for suitable RV standard stars six years ago, there was no existing dataset fulfilling the Gaia RVS requirements in terms of sky coverage, magnitude range, number of targets, and stability. The only official list of standard stars was the one compiled by the IAU Commission 30, which did not turn out to be suitable for our purpose. We thus built a stellar grid consisting of 1420 FGKM stars in the magnitude range 6 < V < 11, with a homogeneous distribution on the sky. The selection process of that sample is fully explained in Crifo et al. (2010). We briefly summarize it in Sect. 2.
The RVS calibration requires standard stars with much better RV stability than the 1 km s-1 accuracy expected from their future measurements with RVS, with no drift until the end of the mission (2018). The value of 300 m s-1 is adopted as the stability level to be checked. To qualify as a reference star, each candidate has to be observed at least twice before launch and another time during the mission to verify its long-term stability. The RV measurements available to date are described in Sect. 3, and their combination into a homogeneous scale in Sect. 4. We compare this new catalogue to other studies in Sect. 5. The stablest stars are presented in Sect. 6 as are considerations about variable stars. Future work is described in Sect. 7.
2. Radial velocity standard-star candidates
The selection of stars suitable for building the reference grid for RVS has been carefully considered and several criteria defined (Crifo et al. 2010). The list of candidates was established from three catalogues: “Radial velocities of 889 late-type stars” (Nidever et al. 2002), “Radial velocities for 6691 K and M giants” (Famaey et al. 2005), and “The Geneva-Copenhagen Survey of Solar neighbourhood” (Nordström et al. 2004), complemented with IAU standards (Udry et al. 1999). We selected the stars having the best observational history in terms of consistency of radial velocity measurements over several years. In that way we could focus on stars more likely to be stable over time. Moreover, since all the candidates are in the Hipparcos Catalogue we were able to check their properties (photometry, spectral type, variability, multiplicity, etc.) in a homegeneous way. Another important criterion was that each candidate had to have no close neighbour within a circular region of 80′′-radius. This criterion was set to ensure that their future RVS spectra will not be contaminated by another overlapping spectrum, 80′′ being the length of an RVS spectrum projected on the sky. This criterion was verified thanks to the USNO-B1 catalogue. These different criteria led to a preliminary list of 1420 candidates having a high probability of being RV-stable and well suited to becoming reference stars for the RVS.
All of the 1420 candidates have at least three previous RV measurements in the above-mentioned catalogues; however, since they have been obtained during observational runs spanning irregular time baselines, their stability has not yet been ensured, particularly not until the end of the Gaia mission. The main cause of RV variability at the level of 300 m s-1 and above is binarity, but the risk of having binary stars with significant amplitude in our sample has been reduced because of all these selection criteria and a careful analysis of the RV measurements available for them so far. The HR diagram of the 1420 candidates is shown in Fig. 1, as originally published in Crifo et al. (2010).
 |
Fig. 1 HR diagram of the 1420 selected stars, with a colour code corresponding to their origin. |
3. Radial velocity measurements
The RV standards to be used for the RVS calibrations should not exhibit variations larger than 300 m s-1 during the five years of the Gaia observations, between 2013 and 2018. Since the standards need to be known before launch, we extrapolated this criterion to the current period in order to perform a pre-qualification of the candidates according to their stability during the time span of our ground-based observations, between 1995 and 2012. Considering that the candidates already have a good observational history, our strategy of pre-qualifying them is (i) to obtain at least two new measurements per star before the Gaia launch, separated by more than one year; and (ii) to verify that the variation in these new measurements does not exceed 300 m s-1. Then supplementary ground-based observations will have to be done during the mission to verify the long-term stability of the reference grid.
 |
Fig. 2 Distribution of the 1420 stars on the celestial sphere in equatorial coordinates. The colour code indicates the number of measurements obtained for each star. A dashed line indicates the projection of the Ecliptic plane, a dotted line that of the Galactic plane. |
Since the candidates are distributed all over the sky, observations in both the northern and southern hemispheres need to be performed with different instruments. An observing plan has been prepared under the umbrella of the Ground Based Observations for Gaia (GBOG) working group in charge of acquiring auxiliary data for the Gaia processing. Eighty nights have been obtained over six years for that programme on four high-resolution spectrographs: ELODIE then SOPHIE mounted on the 1.93-m telescope at Observatoire de Haute-Provence (OHP), NARVAL on the Télescope Bernard Lyot at Observatoire du Pic du Midi, and CORALIE on the Euler-Swiss telescope at La Silla.
RV measurements were also retrieved from the public archives of SOPHIE and ELODIE at OHP (Moultaka et al. 2004), and of HARPS at the ESO Advanced Data Products database. Many measurements are available in these archives, in particular due to the various exoplanet-hunting programmes. The full ELODIE archive was not public when the observations started in 2006, and the volume of the other archives increased dramatically during the course of our programme. The recent query of the archives allowed us to retrieve several thousands of relevant measurements. There were many time series available for some stars. For time series in one single night, only the observation with the highest signal-to-noise ratio was considered. Additional data from the private CORALIE archive have also been provided by the Geneva Observatory.
SOPHIE, CORALIE, ELODIE and HARPS have respectively resolving powers of R = λ/Δλ, ~75 000, 50 000, 42 000, and 120 000, respectively, and cover the visible range. They all have similar automatic on-line data reduction software to derive the barycentric RV by cross-correlation of the spectra with a numerical mask (Baranne et al. 1996). The spectral type of the numerical mask is chosen to be the closest to the observed star. It can be G2, K5, M4, and M5 for SOPHIE, G2, K5 and M2 for HARPS and CORALIE, F0 and K0 for ELODIE.
NARVAL has a resolving power of R ~ 78 000. Since this intrument has not been built for RV measurements but for polarimetry, the on-line reduction software does not include the RV determination. We measured it by cross-correlating the observed spectra with the SOPHIE G2 mask. Our main interest in observing with NARVAL is that its spectral coverage includes the RVS range (847−874 nm), allowing us to investigate possible systematic differences occurring when measuring the RV in the full visible range and in that narrow NIR spectral range. It is, however, beyond the scope of this paper to enter into these considerations.
Errors on radial velocities come from the photon noise, the wavelength calibration and some possible instrumental or other effects, which are impossible to quantify. It is, however, important to estimate errors, noted ϵ in the following, for the weighting scheme adopted to combine measurements taken with different instruments and under various observing conditions. The photon-noise uncertainty is used, deduced from the width and contrast of the cross-correlation function (hereafter CCF) and from the signal-to-noise ratio of the spectrum (Baranne et al. 1996; Bouchy et al. 2005), and provided by the data reduction software. External systematic errors are then quadratically added to the photon-noise uncertainty: 0.8 m s-1 for HARPS (Bouchy, priv. comm.), 4 m s-1 for SOPHIE (Boissé et al. 2012), 5 m s-1 for CORALIE (Naef, priv. comm.), and 15 m s-1 for ELODIE (Baranne et al. 1996). These systematic errors have been estimated for the most precise observing mode of the instruments where the stellar spectrum is recorded simultaneously with a thorium-argon calibration. But not all the HARPS, SOPHIE, and ELODIE spectra in the sample presented here have been obtained in that mode, and the corresponding RV measurements have larger errors. This is taken into account by doubling the systematic error listed above for exposures without the simultaneous calibration. It is worth recalling that ϵ estimated that way does not represent the total RV uncertainty, but is only meant to combine relative measurements with proper weights.
Table 1 summarizes the status of the observations, providing the number of spectroscopic measurements obtained so far with each instrument (NRV), the corresponding number of stars (N∗), the average errors of individual RV measurements  , and the date range of the observations. In total there are 10 214 RV measurements.
, and the date range of the observations. In total there are 10 214 RV measurements.
Summary of RV measurements available as of November 2012, average of individual RV errors, and epoch range of the measurements.
Figure 2 represents the distribution of the 1420 candidate stars on the celestial sphere, with a colour code indicating the number of measurements obtained for each star. As expected, at least two measurements are available for the vast majority of the stars. One measurement is missing for only a few stars in the southern hemisphere.
Figure 3 shows the histogram of the time span between the first and last measurements of each of the 1420 candidates. This is 6.35 years on average (median 4.37 years), up to 17 years thanks to the ELODIE archive.
 |
Fig. 3 Distribution of time baselines of observations for the 1420 candidates. |
4. Combining RVs from different instruments
An important step in the process of determining whether a star has a stable radial velocity or not is to combine the measurements obtained with the different spectrographs. This requires taking the individual zero point of each instrument into account. The zero point is related to the instrument itself, its spectral range, and resolution, and to the calibration procedure and the method used to derive an RV. In our case the same algorithm of cross-correlation with a numerical mask has been used that should minimize the offsets between instruments. However, since different masks have sometimes been used, a dependency of the offsets on the colour is expected. We adopted the SOPHIE frame as the radial velocity reference scale for all spectrographs, and we made certain to have a sufficient number of stars observed in common with SOPHIE and with the other instruments to derive the offsets.
To measure the offset between SOPHIE and the other instruments, we first computed the weighted mean and standard deviation of the RV measurements per instrument and per star. The weight of each individual measurement RVi is defined as  , ϵi being the RV error mentioned in Sect. 3.
, ϵi being the RV error mentioned in Sect. 3.
Figure 4 shows the RV offsets between the various instruments versus the B − V colour index. The error bars, when available, are the quadratic sum of the two standard deviations obtained for a given star observed several times with the two considered instruments. A large error bar is an indication that the star is probably variable. The offsets are constant in general, except for ELODIE where a dependency on colour is clearly seen. The scatter is also much higher when ELODIE is involved. The scatter reflects the RV variations, expected to be more pronounced in the case of a secular drift as the time baseline of the measurements increases, which is the case when ELODIE observations are considered. The scatter also reflects the RV errors, which are higher for ELODIE than for the other instruments (see Table 1). Table 2 summarizes the mean difference and rms scatter obtained when comparing the measurements from two instruments. In this process, an iterative clipping at the 3σ level is performed to remove the outliers. The offset column provides the velocity corrections applied to the measurements of CORALIE, NARVAL, ELODIE, and HARPS to translate them onto the SOPHIE scale.
Boissé et al. (2012) have also measured the RV offset between SOPHIE and ELODIE and found a steeper slope (−425.6(B − V) + 202.4) but their fit is limited to B − V < 0.75. Table 2 and Fig. 5 also present the comparison of the CORALIE and HARPS measurements as an illustration of the excellent agreement between those two instruments.
RV offsets between instruments derived for stars in common.
 |
Fig. 4 Offsets between RV measurements from SOPHIE and the other instruments as provided in Table 2. Error bars when available, are the quadratic sum of the two standard deviations obtained for a given star observed several times with the two instruments being considered. |
Catalogue giving the mean RV on the SOPHIE scale of the 1420 standard star candidates (excerpt).
Two tables are provided for the catalogue, only available electronically. Table 3 gives the original individual RV measurements, and Table 4 gives for each star:
-
the basic data from Hipparcos: HIP number, equatorialcoordinates, V magnitude, B − V, spectral type;
-
the catalogue(s) from which the star was selected: Nidever et al. (2002), Famaey et al. (2005), Nordström et al. (2004) or IAU standard (Udry et al. 1999);
-
the weighted mean radial velocity in the SOPHIE scale,
 , with a weight wi applied to each individual velocity measurement RVi being
, with a weight wi applied to each individual velocity measurement RVi being  and
and  the quadratic sum of ϵi and the offset error listed in Table 2;
the quadratic sum of ϵi and the offset error listed in Table 2; -
the internal error of
:  ;
; -
the
weighted standard deviation σRVS defined as 
-
the number of observations N;
-
the
uncertainty defined as the maximum of the standard error σRVS/ and
and  (Jasniewicz & Mayor 1988);
(Jasniewicz & Mayor 1988); -
the time baseline in days;
-
the mean Julian day of the N observations.
Figure 6 shows the histogram of the variations of the 1420 candidates. We define the level of stability of a given star by 3σRVS. We find that 92.8% of the stars have a stability better than 300 m -1, which is the threshold defined for the calibration of the RVS instrument. More than 1000 stars exhibit a stability better than 100 m s-1 (i.e. σRVS < 33 m s-1).
 |
Fig. 5 Offsets between RV measurements from HARPS and CORALIE showing a remarkably low rms scatter. |
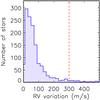 |
Fig. 6 Distribution of RV variations of the candidate standard stars having at least two RV measurements separated by 100 days or more. The variation is defined by 3σRVS. A dashed line shows the 300 m s-1 stability threshold adopted for the calibration of the RVS instrument. |
5. Comparison with other catalogues
The catalogue of Nidever et al. (2002) contains 889 late-type stars followed during several years, with 782 of them exhibiting a velocity scatter less than 100 m s-1. Some 336 stars of the catalogue presented here have been selected from the stable stars of Nidever et al. (2002) and fulfil the Gaia-RVS requirements. Our catalogue also has 355 stars in common with the recent list of Chubak et al. (2012) which provides RVs for 2046 nearby FGKM stars. Comparisons with those two catalogues are shown in Fig. 7 as a function of B − V. There is general good agreement with small zero-point differences. The outliers reveal the intrinsic variable stars, as well as systematics due to methodology. For B − V ≳ 1.2 there is a clear systematic effect. We note that both Nidever et al. (2002) and Chubak et al. (2012) use the same technique of chi-square minimization to determine the relative shifts between a template spectrum and an observed spectrum, but not in the same spectral range. They use an M-dwarf observed spectrum as template for cool stars and a solar spectrum for the other stars. The two catalogues are constructed on the same scale, as explained in Chubak et al. (2012). We divide the comparison of their values to the present ones into two parts, according to their reference template. Results are presented in Table 5.
Comparison of RVs obtained with by Nidever et al. (2002) and Chubak et al. (2012) and those presented here, according to the templates they used.
 |
Fig. 7 Difference between our radial velocities and those from Nidever et al. (2002) (left panel) and Chubak et al. (2012) (right panel) as a function of the B − V colour index. Red dots indicate the stars they have analysed with an M template, while for the other ones they used the solar spectrum as reference. The offset and rms values are given for FGK stars and for M stars in Table 5. |
We get very similar zero-point difference in both cases, which is expected since the catalogues of Nidever et al. (2002) and Chubak et al. (2012) are on the same scale. The very low rms scatter of 33 m s-1 obtained for the comparison to Nidever et al. (2002) for FGK stars is remarkable for two reasons. First, since the median epoch of Nidever et al. observations (1999.0) is earlier than ours (2006.9), it means that most of the stars in common have not varied much during that period. Second, it also shows that the precision of the present catalogue is not worse than 33 m s-1. The same level of scatter has already been measured by Nidever et al. (2002) when they compared their catalogue to the best set of standard stars available at the time, assembled by the Geneva team (Udry et al. 1999) and based on CORAVEL and ELODIE. The ELODIE measurements that were used to build the Udry et al. standard star catalogue are among those retrieved from the archive for the present catalogue. We do not show the comparison to Udry et al. (1999) since we have measurements in common. It is worth noticing that there is no correlation of the differences with Nidever et al. (2002) with B − V in the FGK range, even though the stars of the present catalogue have been analysed with different masks.
For RVs obtained by Chubak et al. (2012) and Nidever et al. (2002) with an M-dwarf template, the mean difference and rms are much larger. Figure 7 suggests that there might be a correlation of these differences with colour, but the B − V interval is too narrow to confirm this claim. Such significant offset and rms compared with Udry et al. (1999) have already been found and discussed in both articles, so we confirm with a larger sample the assertion by Chubak et al. (2012) that “the M dwarf velocities in general, from all surveys, remain uncertain at the level of 200 m s-1 (rms) and harbor uncertain zero points at the level of 150 m s-1”.
The comparison with the catalogue of Latham et al. (2002) is shown in Fig. 8. This catalogue contains 1359 single-lined stars on the Center for Astrophysics (CfA) scale. The difference is: ΔRV = RVS − RVLATHAM = 161 m s-1 for 66 stars in common after rejection of two outliers. This offset is quite significant but it agrees with the zero-point correction of 139 m s-1 that they determined from asteroids. Although the Latham et al. RVs are presented as having errors ranging between 0.5 to 1.5 km s-1, we measure a much lower rms scatter, 164 m s-1, which suggests that their errors are lower for the 65 common stars.
6. Stable and variable stars
Chubak et al. (2012) present a list of 131 FGKM standard stars having constant radial velocity over ten years. We have 63 stars in common with this list and the comparison is presented in Fig. 9. The average offset is ΔRV = RVS − RVChubak = 81 m s-1, with an rms scatter of 63 m s-1 after rejection of seven outliers at B − V 1.2. This rms scatter is lower than in the comparison with the main catalogue of Chubak et al. (2012) presented in Table 5, but does not reach the very low value of 33 m s-1 obtained in the comparison with Nidever et al. (2002). This means that either the Chubak et al. standard stars are less stable than the Nidever et al. ones, or that their errors are significantly higher than the Nidever et al. ones.
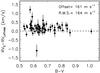 |
Fig. 8 Comparison of RVs obtained with by Latham et al. (2002) and those presented here. The offset and rms values have been obtained after rejectiing two outliers. |
 |
Fig. 9 Difference in radial velocities of the Chubak et al. standard stars for 63 stars in common. The offset and rms values have been obtained after rejecting seven outliers at B − V > 1.2. |
The catalogue presented here is also a good source for very stable stars that are good candidates for becoming official RV-standards useful for many projects other than Gaia. Table 4 can easily be queried with criteria such as
-
at least 4 measurements available;
-
standard deviation on the SOPHIE scale σRVS < 33 m s-1 (i.e. stability better than 100 m s-1);
-
time baseline of ten years at least.
More than 300 stars verify these conditions and should be followed up in the future to become official RV-standards. Several of these stars are shown in Fig. 10. They were observed with different instruments and the agreement of the measurements demonstrates that the zero points have been properly corrected.
 |
Fig. 10 RV measurements for some of the long-term stable stars of the catalogue. The RV axis is centred on |

Several stars showing a remarkable trend in their RV are shown in Fig. 11. The presence of a low-mass companion likely explains these drifts. The oscillation of HIP017960 is due to a Jupiter like exoplanet already reported by Boissé et al. (2012). HIP079248 is also known to harbour two exoplanets (Goździewski et al. 2006). A Keplerian orbit with a period of 1161 ± 45 days was fitted on HIP098714 measurements by Sivan et al. (2004), revealing the presence of a planetary companion. Its semi-amplitude of 95 ± 17 m s-1 is still low enough to make this star suitable for the RVS calibrations. Interestingly, HIP041844 and HIP044089 are part of the Nidever et al. stable stars. The drift of these two stars is quite slow, which might explain why Nidever et al. have not been able to detect it within the time range of their observations. This demonstrates that it is very important to have observations over a sufficient time base to detect such variations.
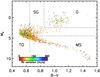 |
Fig. 12 HR diagram of the 1420 candidates with a colour code corresponding to their stability level 3σRVS. The less stable stars, with 3σRVS > 300 m s-1, are indicated as black points. Those are not suitable for calibrating the RVS instrument. The HR diagram is divided into four parts corresponding roughly to turn-off, main sequence, subgiants, and giants where median RV scatter, and the fractions of stable and variable stars have been evaluated (Table 6). |
However, the number of binary stars remaining in our sample is expected to be very low. The selection criteria described in Crifo et al. (2010) and recalled in Sect. 2 eliminated all known double stars and variable stars (photometrically and spectroscopically), as well as those with fainter neighbours. Hipparcos efficiently detected double stars with separations of 0.1′′ to 10′′, and magnitude differences lower than 4 mag (see Fig. 3.2.106 available in the Hipparcos Catalogue2 volume 1). Such stars are labelled in Hipparcos and were not selected by Crifo et al. (2010). This guarantees that there is no spectroscopic binaries with short-term variations in our sample, because the candidates are very nearby stars, all closer than 150 pc except some giants. Only a few wide systems with a faint secondary (M star or white dwarf) and a rather long period may therefore remain in the sample. For those, the second round of observations during the Gaia mission will be decisive in constraining their long-term behaviour. With new observations to be done after 2014, we will extend the time baselines by several years (current median epoch of our observations is 2006.9), and we will have at least three measurements per star (67% of the stars have already 3 measurements or more), well distributed in time and with a much higher precision than the threshold of 300 m s-1. This will guarantee that we cannot miss any long period binary with large amplitude that would not be suitable for the RVS calibrations.
It is interesting to investigate whether the most stable stars, with σRVS < 30 m s-1, or on the contrary the less stable stars, with σRVS > 100 m s-1, display in peculiar locations of the HR diagram. Figure 12 shows the HR diagram of the 1420 candidates with a colour code corresponding to their stability level 3σRVS. The median σRVS and the fraction of stable and non-stable stars are evaluated into four parts of HR diagram, as indicated in Fig. 12: main sequence (MV > 4.5,B − V > 0.65), turn-off (B − V ≤ 0.65), giants (MV ≤ 2.5,B − V > 0.85), and sub-giants (the rest of the sample). Results of the counts are given in Table 6. They clearly show that giants are less stable on average than dwarfs and subgiants, confirming previous findings (Döllinger et al. 2005). Not only is the presence of a stellar or substellar companion orbiting around the giant star suspected to cause the RV variations, but also the possible rotational modulation of surface inhomogeneities or pulsations.
Percentage of stable (σRVS < 30 m s-1) and variable (σRVS > 100 m s-1) stars among our 1420 selected candidates, in four parts of the HR diagram.
7. Next steps
There are many physical mechanisms that affect spectroscopic radial velocities (Lindegren & Dravins 2003). For instance, the convective shifts caused by motions in stellar atmospheres depend on stellar lines and on the temperature and gravity. They can reach 3 km s-1 for a Caii line in an F dwarf, and − 0.4 km s-1 for an Fei line in a K giant (Chiavassa et al. 2011). Other astrophysical processes may affect the spectroscopic RV of a star, such as its rotation and activity, the granulation, or the presence of low-mass companions.
One of the objectives of our ongoing project will be to provide an accurate kinematical RV for each of the 1420 stars in the sample. This will be done by deriving the gravitational redshift from atmospheric parameters and the convective shift corrections from three-dimensional hydrodynamical model atmospheres. Another step will be to determine the zero point of the catalogue by comparing the RV measurements of a selection of asteroids with their kinematical velocities as derived from celestial mechanics. Finally, we will continue the observations of the 1420 candidate stars during the Gaia mission in order to validate the long-term stability of their RV. All those steps are essential for calibrating the measurements that will be performed with the Gaia-RVS.
8. Conclusion
We have presented the pre-launch version of the catalogue of RV standard stars for Gaia, assembled thanks to a long-term observing programme started in 2006 on several spectrographs and with archived measurements. The precision of this catalogue is at the same level as that of Nidever et al. (2002), ~33 m s-1, for FGK stars (0.5 ≲ B − V ≲ 1.2), showing that the RV measurements from the different instruments have been properly combined. The vast majority of the 1420 selected candidates are found to be stable at the 300 m s-1 level, which makes them suitable for calibrating the RVS instrument. Their long-term stability will have to be confirmed with new ground-based observations during the Gaia operations.
The stable stars presented here have characteristics that make them very useful as standards for many projects other than Gaia. They have a good coverage of important parameters, such as sky distribution, apparent magnitude, spectral type, and luminosity class. They can be used to intercompare intruments and calibrations of zero point of spectroscopic observations. The stars and measurements of this list and those of all other studies on RV-calibrators will soon be discussed within the task group “radial-velocity standard stars” of the IAU Commission 30.
Acknowledgments
We are indebted to AS-Gaia, PNPS, and PNCG for their financial support of the observing campaigns and help in this project. We thank Frédéric Arenou for valuable discussions about the contamination of our sample by binary stars. We warmly thank Sergio Ilovaisky, Maxime Marmier, and Dominique Naef for helping us retrieve relevant data in the OHP and Geneva archives. Many thanks also go to staff of the observatories who made observations, and to Lionel Veltz who also contributed to them. We also thank the staff maintaining the public archives of ready-to-use spectra at OHP and ESO. L.C. acknowledges a financial support from CNES.
References
- Baranne, A., Queloz, D., Mayor, M., et al. 1996, A&AS, 119, 373 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Boissé, I., Pepe, F., Perrier, C., et al. 2012, A&A, 545, A55 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Bouchy, F., Pont, F., Melo, C., et al. 2005, A&A, 431, 1105 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Chiavassa, A., Bigot, L., Thévenin, F., et al. 2011, J. Phys. Conf. Ser., 328, 012012 [NASA ADS] [CrossRef] [Google Scholar]
- Chubak, C., Marcy, G., Fischer, D. A., et al. 2012 [arXiv:1207.6212] [Google Scholar]
- Crifo, F., Jasniewicz, G., Soubiran, C., et al. 2010, A&A, 524, A10 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- de Bruijne, J. H. J. 2012, Ap&SS, 341, 31 [NASA ADS] [CrossRef] [Google Scholar]
- Döllinger, M. P., Pasquini, L., Hatzes, A. P., et al. 2005, The Messenger, 122, 39 [Google Scholar]
- Famaey, B., Jorissen, A., Luri, X., et al. 2005, A&A, 430, 165 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Goździewski, K., Konacki, M., & Maciejewski, A. J. 2006, ApJ, 645, 688 [NASA ADS] [CrossRef] [Google Scholar]
- Jasniewicz, G., & Mayor, M. 1988, A&A, 203, 329 [NASA ADS] [Google Scholar]
- Jasniewicz, G., Crifo, F., Soubiran, C., et al. 2011, EAS Publ. Ser., 45, 195 [CrossRef] [EDP Sciences] [Google Scholar]
- Katz, D. 2009, in SF2A-2009, Proc. of the Annual meet. of the French Society of Astronomy and Astrophysics, 57 [Google Scholar]
- Katz, D., Munari, U., Cropper, M., et al. 2004, MNRAS, 354, 1223 [NASA ADS] [CrossRef] [Google Scholar]
- Katz, D., Cropper, M., Meynadier, F., et al. 2011, EAS Publ. Ser., 45, 189 [Google Scholar]
- Latham, D. W., Stefanik, R. P., Torres, G., et al. 2002, AJ, 124, 1144 [NASA ADS] [CrossRef] [Google Scholar]
- Lindegren, L., & Dravins, D. 2003, A&A, 401, 1185 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Moultaka, J., Ilovaisky, S. A., Prugniel, P., & Soubiran, C. 2004, PASP, 116, 693 [NASA ADS] [CrossRef] [Google Scholar]
- Nidever, D. L., Marcy, G. W., Butler, R. P., Fischer, D. A., & Vogt, S. S. 2002, ApJS, 141, 503 [NASA ADS] [CrossRef] [Google Scholar]
- Nordström, B., Mayor, M., Andersen, J., et al. 2004, A&A, 418, 989 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Sivan, J.-P., Mayor, M., Naef, D., et al. 2004, Planetary Systems in the Universe, 202, 124 [NASA ADS] [Google Scholar]
- Steinmetz, M., Zwitter, T., Siebert, A., et al. 2006, AJ, 132, 1645 [NASA ADS] [CrossRef] [Google Scholar]
- Udry, S., Mayor, M., & Queloz, D. 1999, Precise Stellar Radial Velocities, IAU Colloq. 170, ASP Conf. Ser., 185, 367 [NASA ADS] [Google Scholar]
- Wilkinson, M. I., Vallenari, A., Turon, C., et al. 2005, MNRAS, 359, 1306 [NASA ADS] [CrossRef] [Google Scholar]
All Tables
Summary of RV measurements available as of November 2012, average of individual RV errors, and epoch range of the measurements.
Catalogue giving the mean RV on the SOPHIE scale of the 1420 standard star candidates (excerpt).
Comparison of RVs obtained with by Nidever et al. (2002) and Chubak et al. (2012) and those presented here, according to the templates they used.
Percentage of stable (σRVS < 30 m s-1) and variable (σRVS > 100 m s-1) stars among our 1420 selected candidates, in four parts of the HR diagram.
All Figures
|
Fig. 1 HR diagram of the 1420 selected stars, with a colour code corresponding to their origin. |
| In the text | |
|
Fig. 2 Distribution of the 1420 stars on the celestial sphere in equatorial coordinates. The colour code indicates the number of measurements obtained for each star. A dashed line indicates the projection of the Ecliptic plane, a dotted line that of the Galactic plane. |
| In the text | |
|
Fig. 3 Distribution of time baselines of observations for the 1420 candidates. |
| In the text | |
|
Fig. 4 Offsets between RV measurements from SOPHIE and the other instruments as provided in Table 2. Error bars when available, are the quadratic sum of the two standard deviations obtained for a given star observed several times with the two instruments being considered. |
| In the text | |
|
Fig. 5 Offsets between RV measurements from HARPS and CORALIE showing a remarkably low rms scatter. |
| In the text | |
|
Fig. 6 Distribution of RV variations of the candidate standard stars having at least two RV measurements separated by 100 days or more. The variation is defined by 3σRVS. A dashed line shows the 300 m s-1 stability threshold adopted for the calibration of the RVS instrument. |
| In the text | |
|
Fig. 7 Difference between our radial velocities and those from Nidever et al. (2002) (left panel) and Chubak et al. (2012) (right panel) as a function of the B − V colour index. Red dots indicate the stars they have analysed with an M template, while for the other ones they used the solar spectrum as reference. The offset and rms values are given for FGK stars and for M stars in Table 5. |
| In the text | |
|
Fig. 8 Comparison of RVs obtained with by Latham et al. (2002) and those presented here. The offset and rms values have been obtained after rejectiing two outliers. |
| In the text | |
|
Fig. 9 Difference in radial velocities of the Chubak et al. standard stars for 63 stars in common. The offset and rms values have been obtained after rejecting seven outliers at B − V > 1.2. |
| In the text | |
|
Fig. 10 RV measurements for some of the long-term stable stars of the catalogue. The RV axis is centred on |
| In the text | |
 |
Fig. 11 Trend in RV measurements for some stars of the catalogue. Symbols as in Fig. 10. |
| In the text | |
|
Fig. 12 HR diagram of the 1420 candidates with a colour code corresponding to their stability level 3σRVS. The less stable stars, with 3σRVS > 300 m s-1, are indicated as black points. Those are not suitable for calibrating the RVS instrument. The HR diagram is divided into four parts corresponding roughly to turn-off, main sequence, subgiants, and giants where median RV scatter, and the fractions of stable and variable stars have been evaluated (Table 6). |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.