Fig. 3
Download original image
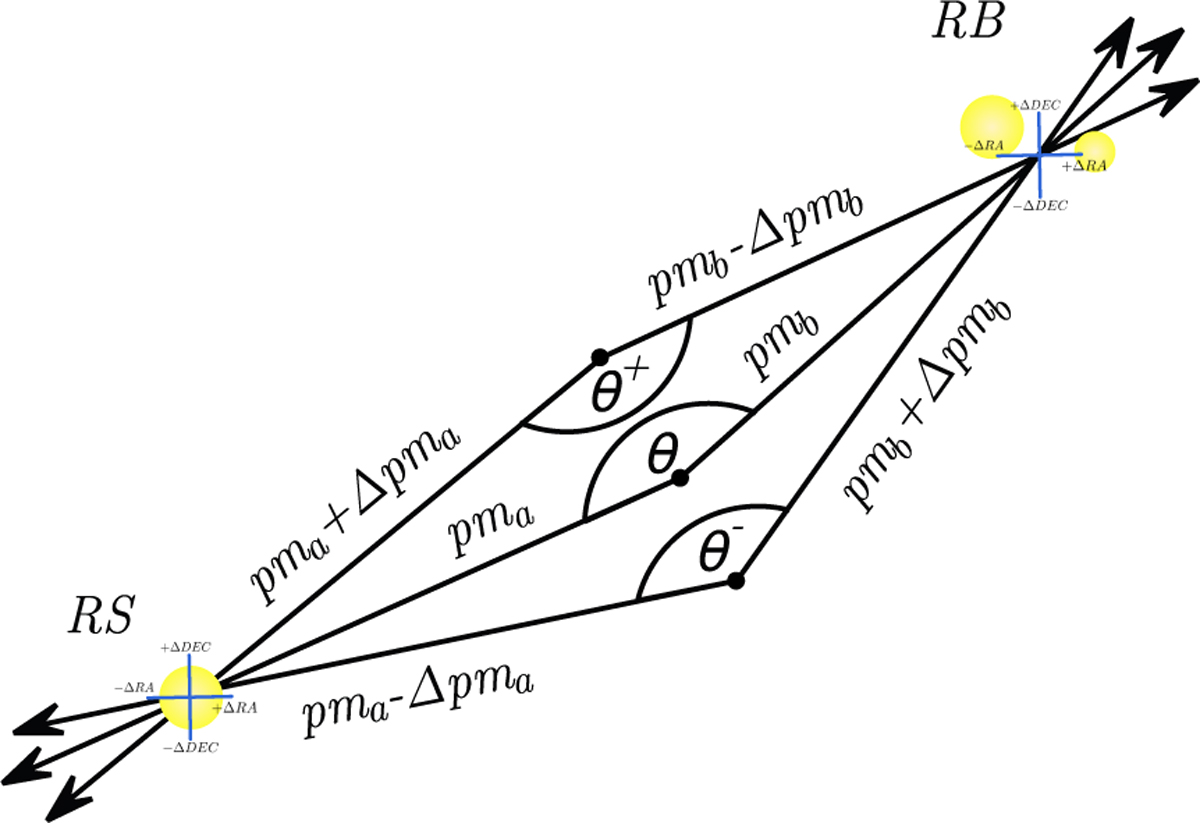
Diagram illustrating the selection method for the angle of intersection. We have the two limiting vectors described by the error in position and proper motion (pma ± Δ pma and pmb ± Δ pmb) for the RS and RB, which yield a minimum (lower) and maximum (upper) possible angle (using the 1σ uncertainties in both directions; see Eqs. (A.10), (A.11), and (A.12)). If a given pair has an angle of intersection consistent with 180∘ to within these upper and lower bounds, we keep it in our sample and discard it otherwise. We note that the RB is not resolved and the cross point is at the center of light.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.