Fig. 1
Download original image
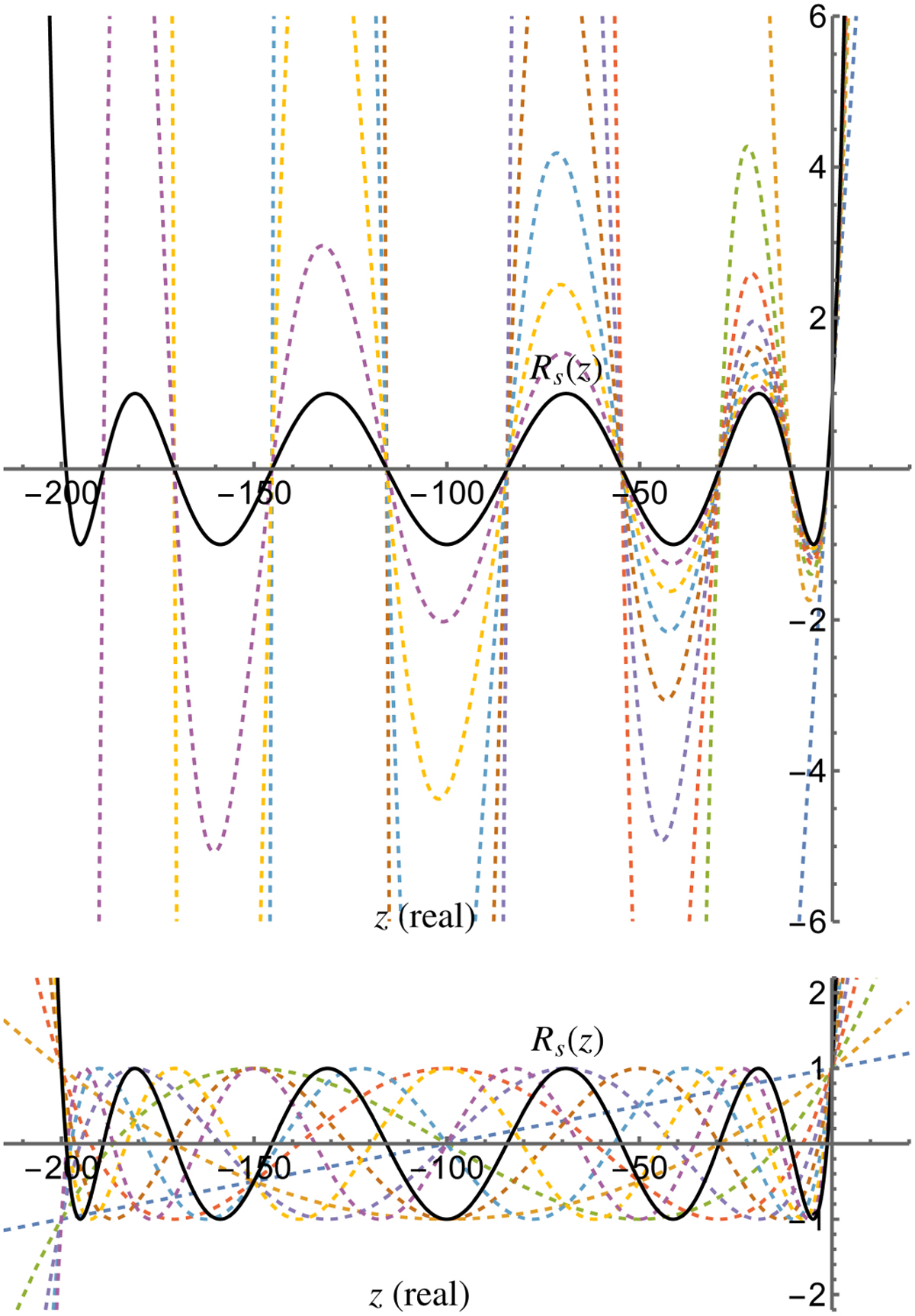
Comparison of the STS implementation in Eq. (12), top, and the stable implementation based on Chebyshev recurrence in Eq. (13), bottom, of the first-order Chebyshev method with an optimal stability polynomial given in Eq. (11). The stability polynomial Rs(z) defined in Eq. (11) for s = 10 (see black curves) and the stability polynomials of internal stages (related to kj, j = 1 . . ., s − 1, see color curves) are plotted as a function of z which is assumed purely real here. The STS implementation exhibits poor internal stability, with internal stability polynomials oscillating with large amplitude resulting in instabilities with respect to roundoff errors, in contrast to the Chebyshev recurrence implementation defined in Eq. (13), with favorable internal stability where the amplitude of the internal stage stability polynomials remains bounded by 1.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.