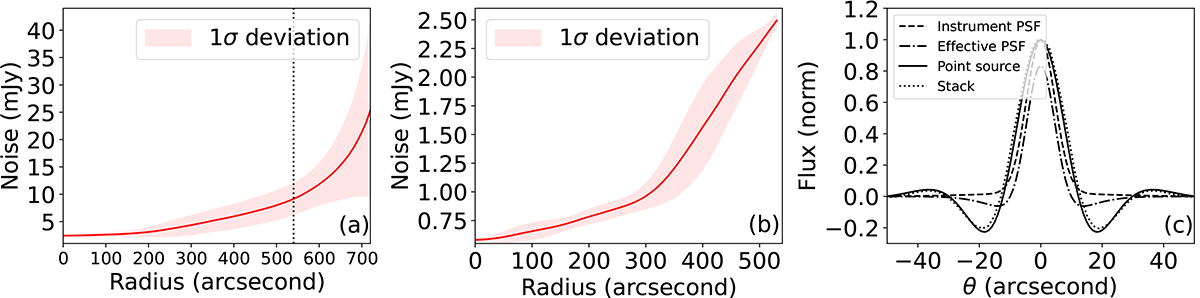
Fig. 2.
Download original image
Overview of the noise and PSF properties before and after applying the matched filter. (a) Azimuthally averaged radial RMS profile of the SCUBA-2 map before the matched filtering process, with the 1σ deviation shown as the shaded region. The RMS increases monolithically with radius. The dashed line reflects the radius of the retained region that we consider. (b) RMS profile of the matched filtered map, which is significantly reduced compared to the original RMS level. The inhomogeneous radial RMS changes the effective area observed at different flux levels. (c) Two-component instrumental PSF from Mairs et al. (2021, dashed line). The effective PSF for the matched-filtering process is shown as a dash-dotted line. The solid line and dotted line represent the shape of the point source from analytics and from stacking all sources above 5σ in the matched-filtered map, respectively. The broadened PSF and “negative ring” are caused by the smoothing process and background subtraction.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.