Fig. D.4.
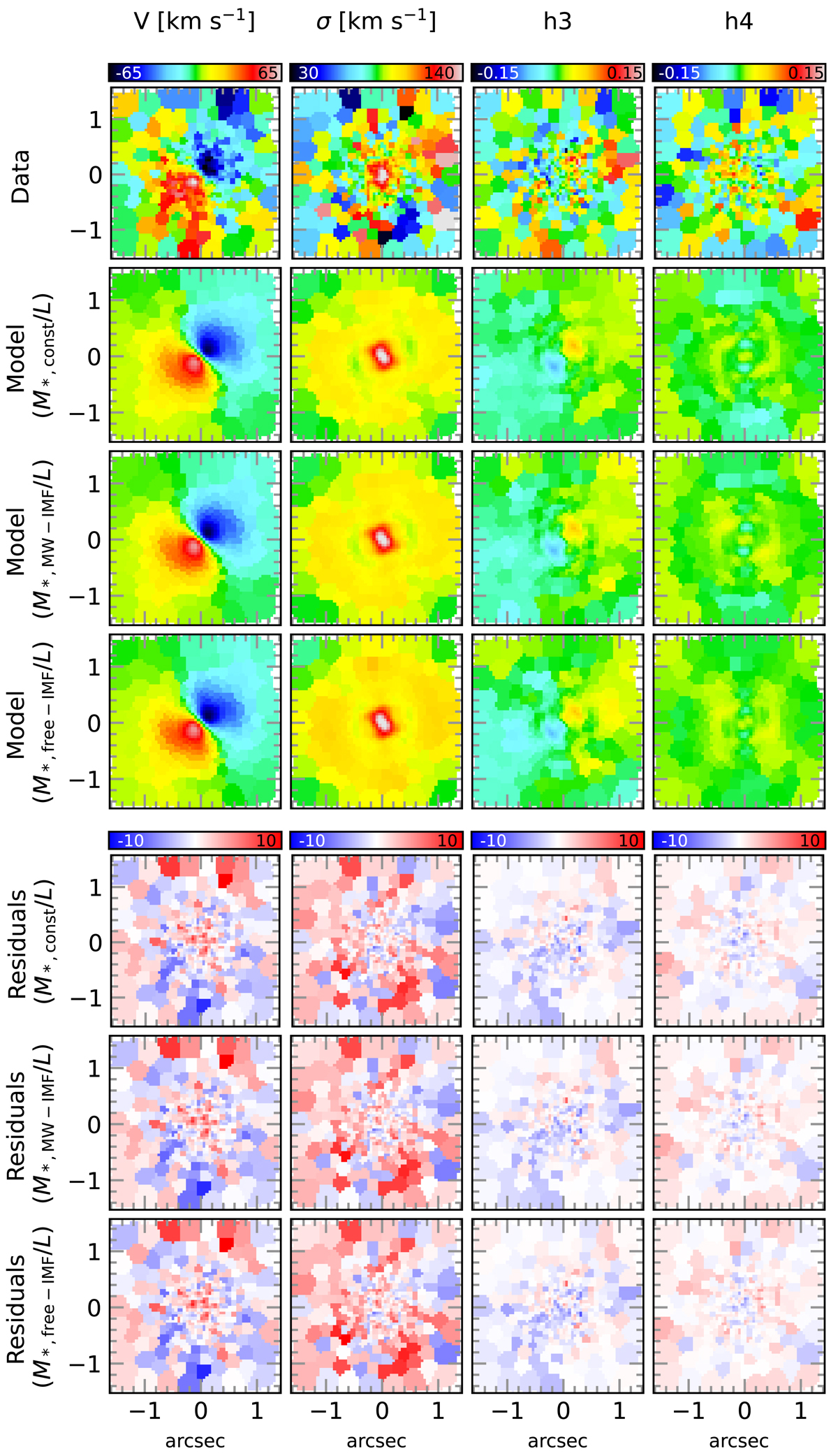
Download original image
Comparison between SINFONI kinematics and best-fitting DYNAMITE models. From left to right: Mean velocity, velocity dispersion, h3 and h4 Gauss-Hermite moments. From top to bottom: Data, best-fitting Schwarzschild model of the models with constant M*/L, models with varying M*/L and constant IMF, and models with varying M*/L and varying IMF. The bottom three rows show the residual maps of the models with constant M*/L, models with varying M*/L and constant IMF and models with varying M*/L and varying IMF. Residuals are defined as difference between the Schwarzschild model and observed kinematics divided by the observational errors. North is up and east to the left.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.