Fig. 1
Download original image
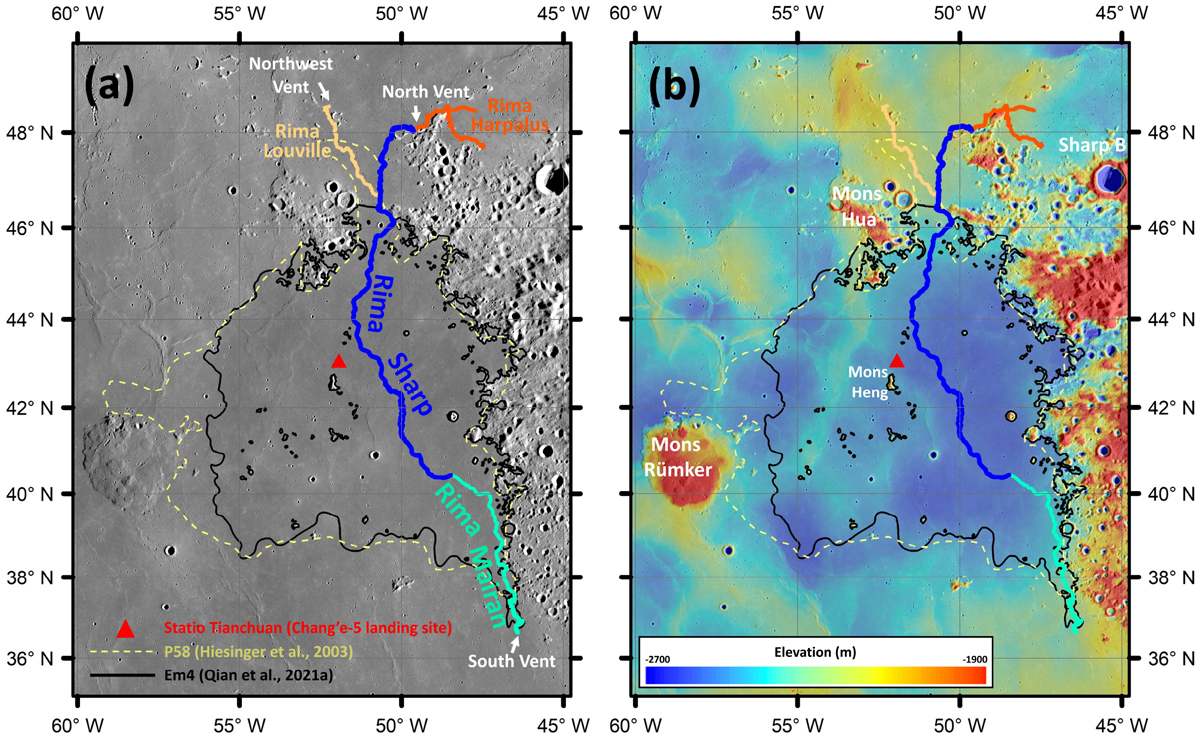
Sinuous rilles in the vicinity of the Chang’e-5 landing site, Statio Tianchuan (Kaguya Terrain Camera (TC) Morning Map, 10 m pixel−1; Haruyama et al. 2008) (a). SELENE/Kaguya TC + Lunar Reconnaissance Orbiter (LRO) Lunar Orbiter Laser Altimeter (LOLA) merged topography (SLDEM2015; 512 pixel degree−1; Barker et al. 2016) overlaid on the same TC images (b). Small branches of the rilles are not shown. The Chang’e-5 site is indicated bythe red triangle and the boundaries of P58 (Hiesinger et al. 2003) and Em4 (Qian et al. 2021a) mare units are delineated by dashed yellow and solid black curves, respectively. The South Vent, North Vent, and Northwest Vent are labeled. All the maps in this work are projected in Mercator projection centered at the Chang’e-5 landing site.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.