Fig. 6
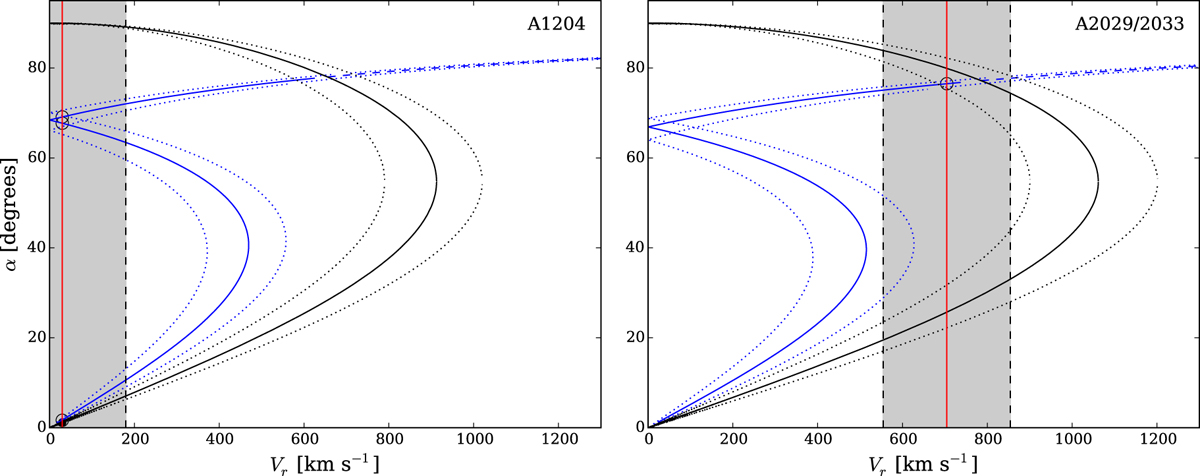
Projection angle (α) as a functionof the relative radial velocity difference (V r) computed according to the equations of motion for A1204 (left panel) and A2029/A2033 (right panel). Solid black curves separate the bound and unbound solutions according to the Newtonian criterion. Blue curves are the solutions of the equations of motions for bound (solid line) and unbound systems (dashed line) and the solutions for each system are marked with open circles, according to the observed V r marked with the red line where the gray region corresponds to the uncertainty in these values delimited by the dashed black line. Point curves express the uncertainties in the computed curves considering the errors in the adopted lensing masses.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.