Fig. 4
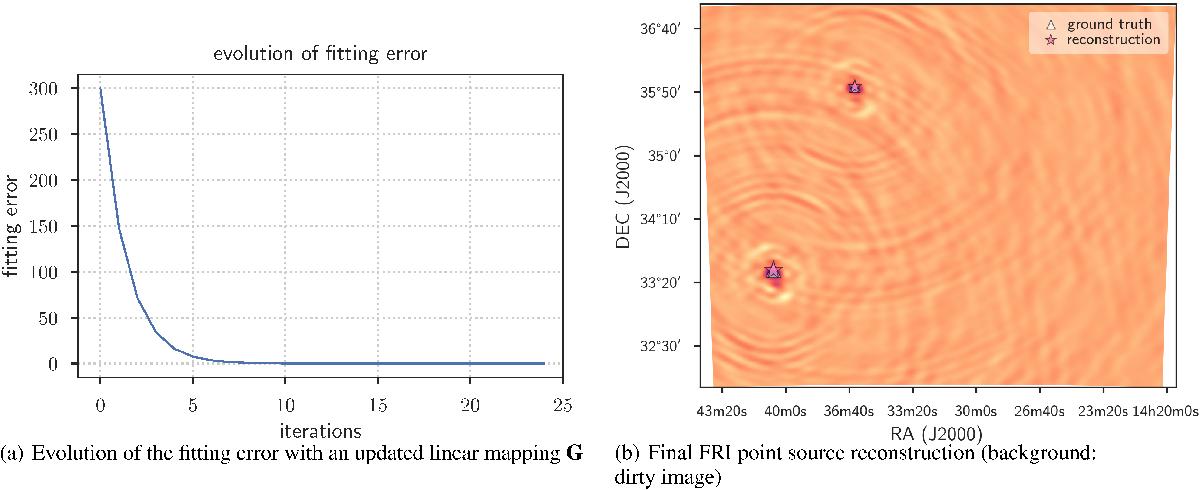
Iterative refinement of the linear mapping G in (2.3.1) for exact point source reconstruction (see details in Sect. 2.3.4). Panel a: The evolution of the fitting error between the re-synthesized and given noiseless visibility measurements. Panel b: Exact reconstruction of the point sources with LEAP (background image: dirty image from the same visibility measurements).
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.