Fig. 10
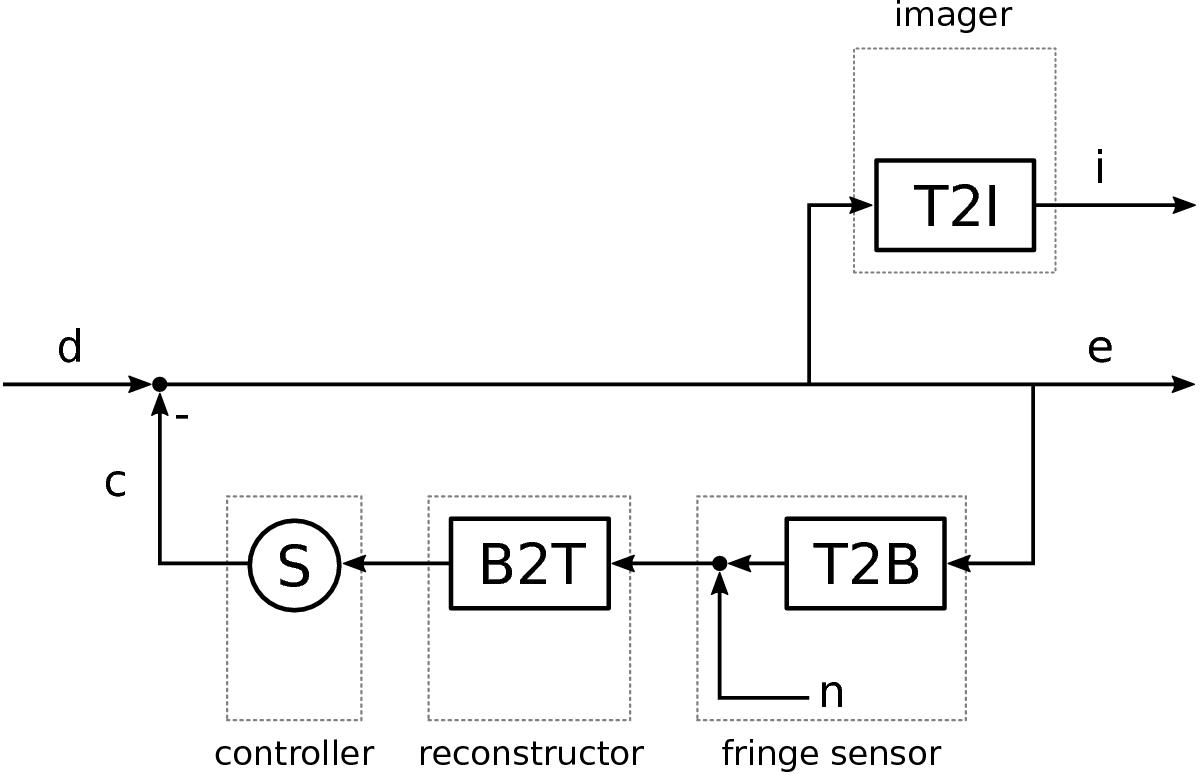
Fringe tracking control model. Top: for each telescope, the residual piston error e corresponds to the fringe tracking command c removed from the piston disturbance d. The fringe sensor measures differential piston on baselines and introduces noise n. The layout of the fringe sensor is contained in the T2B matrix that converts the individual pistons at the level of the telescopes into the differential piston at the level of the fringe sensor baselines.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.