Fig. 2
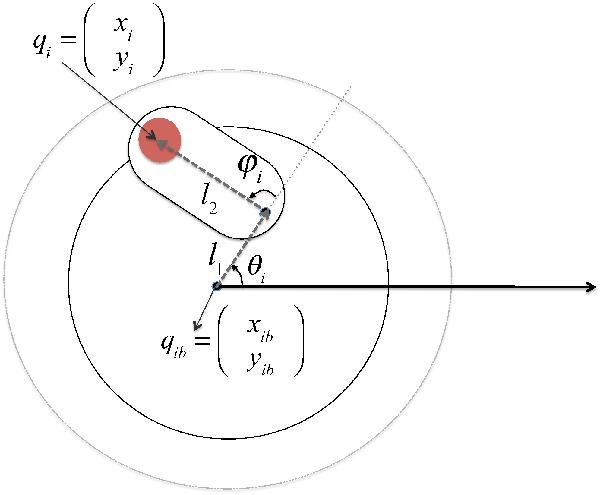
A positioner robot with two degrees of freedom. The main disk (black circle) rotates along its central axis. Its angular position is shown as θi. The arm with the length of l2 rotates around an eccentric axis (with the distance of l1 from the center) fixed on the main disk and its angular position is shown as φi. qib is the position of the robot base fixed to the telescope structure in a global frame attached to the focal plane. qi is the position of the fiber attached to the robot i in that global frame.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.