Fig. 11
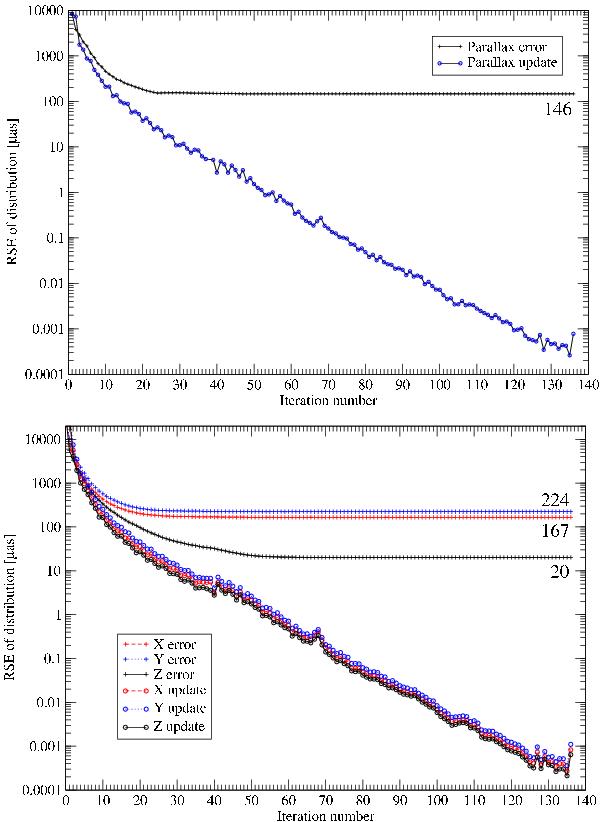
Top: evolution of the typical parallax error (crosses) and parallax update (circles) as functions of the iteration number. The typical error settles at around 146 μas. Bottom: evolution of the typical attitude error (crosses) and update (circles) as functions of the iteration number, for the three principal SRS axes x (red), y (blue), and z (black). The errors settle at around 167, 224, and 20 μas, respectively. In both these plots the typical errors and updates are given by the Robust Scatter Estimate (RSE), similar to an rms value (see footnote 18).
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.