Fig. 1
Download original image
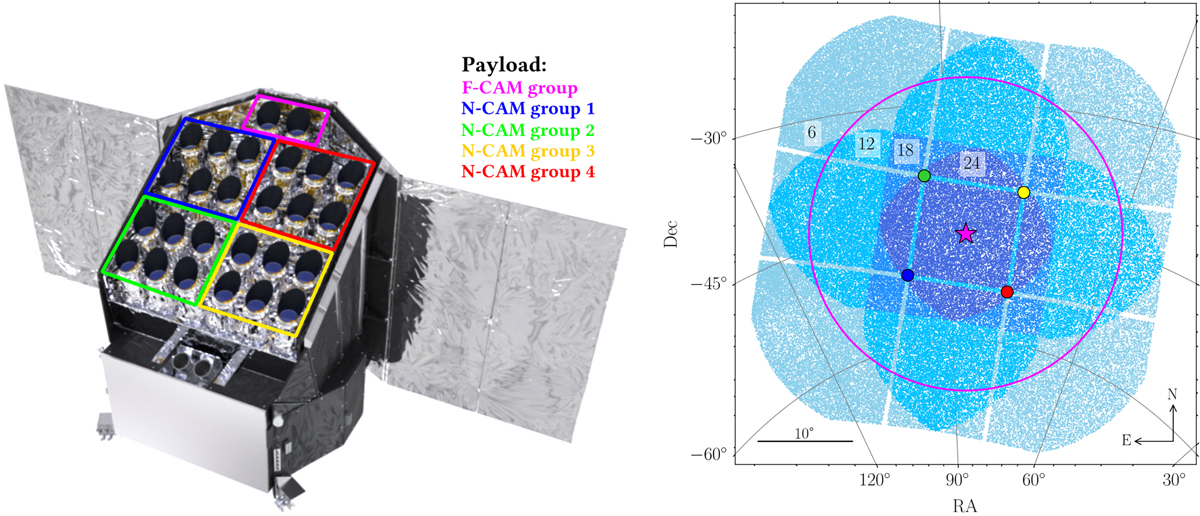
Overview of the PLATO multi-camera design. Left: Schematics of the PLATO spacecraft consisting of the payload module (with colour indication of the telescope groups) and the service module (bus). Credit: ESA/ATG medialab. Right: On-sky FOV of PLATO shown for a pointing towards the Long-duration Observation Phase (LOP) south in equatorial coordinates. The increasing darker shade of blue illustrates the increasing N-CAM overlap of nCAM ∈ {6, 12, 18, 24} (also indicated in the white boxes). The coloured dots show the pointing of each N-CAM group, cf. the left-hand plot. The magenta star indicates the pointing of the two F-CAMs, which is parallel to the pointing of the platform, while the magenta circle shows the (camera-only) F-CAM FOV. Data courtesy: Montalto et al. (2021) and Pertenais et al. (2021).
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.