Free Access
Fig. 6.
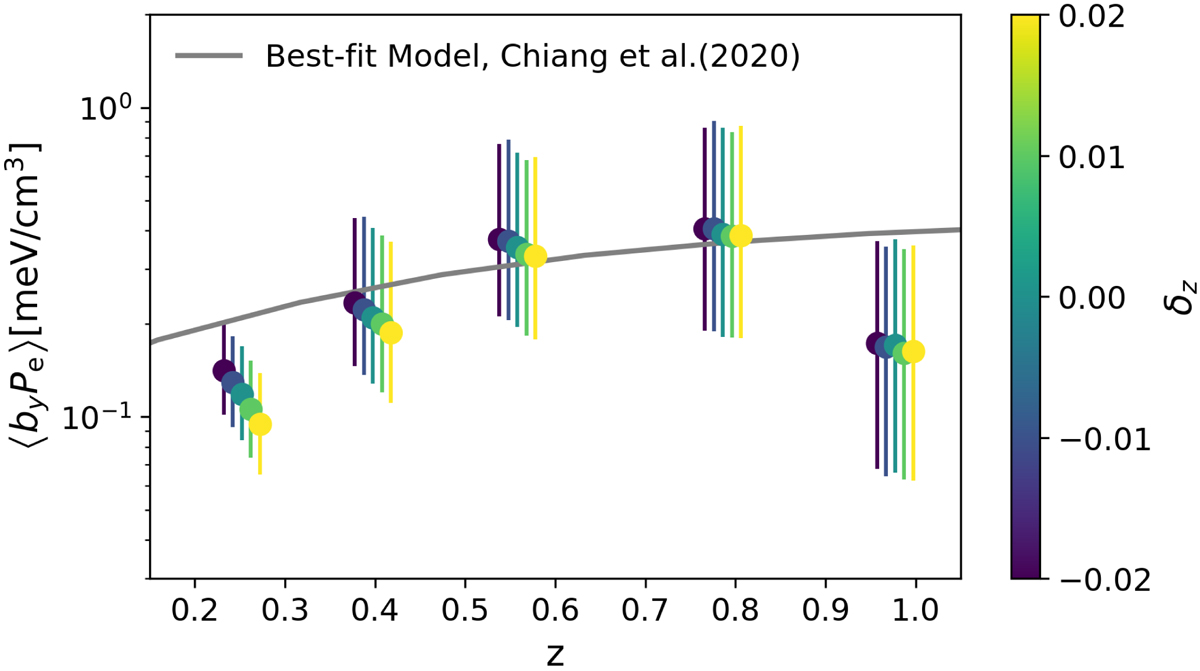
Best fit ⟨byPe⟩ with varying redshift distribution shifts. The non-linear model is the halo model non-linear template. The best-fit parameter values and errors are calculated as the modes and standard deviations of the Gaussian kernel density estimation (KDE) fits of marginalised posterior distribution.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.