Fig. 9.
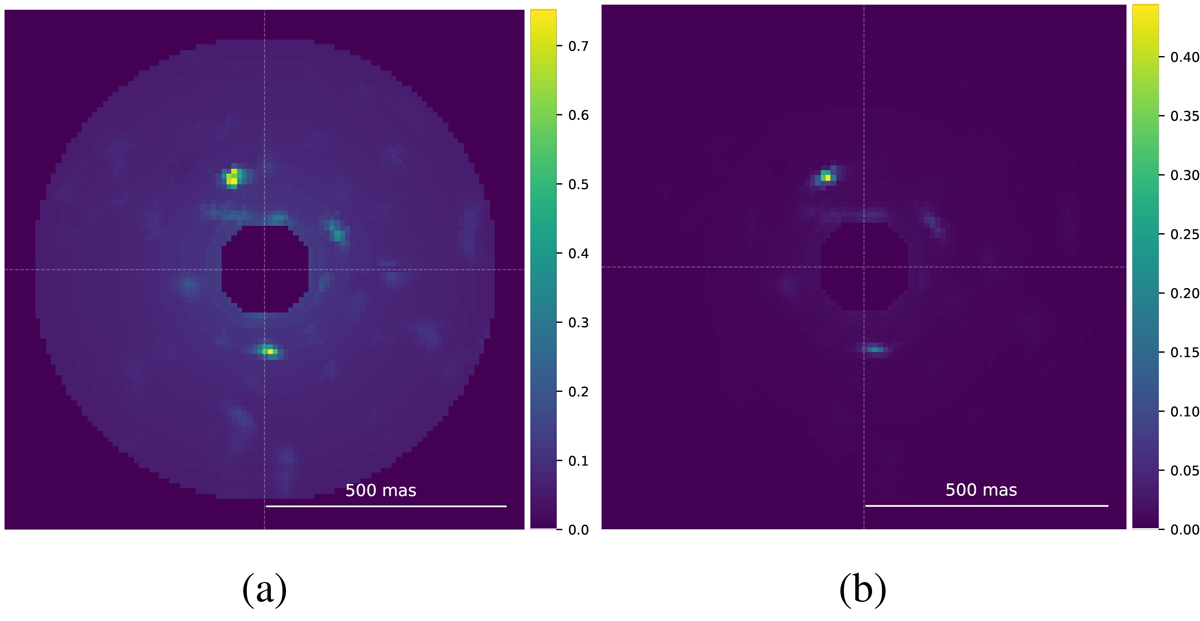
RSM map generated with forward and forward-backward approach for the LMIRCam data set using KLIP with 18 principal components, a FOV rotation expressed in terms of FWHM of 0.3 and a Gaussian distribution. A square root-based scale has been used to increase the background speckle noise brightness. (a) Original RSM map and (b) Forward-Backward RSM map.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.