Fig. 4
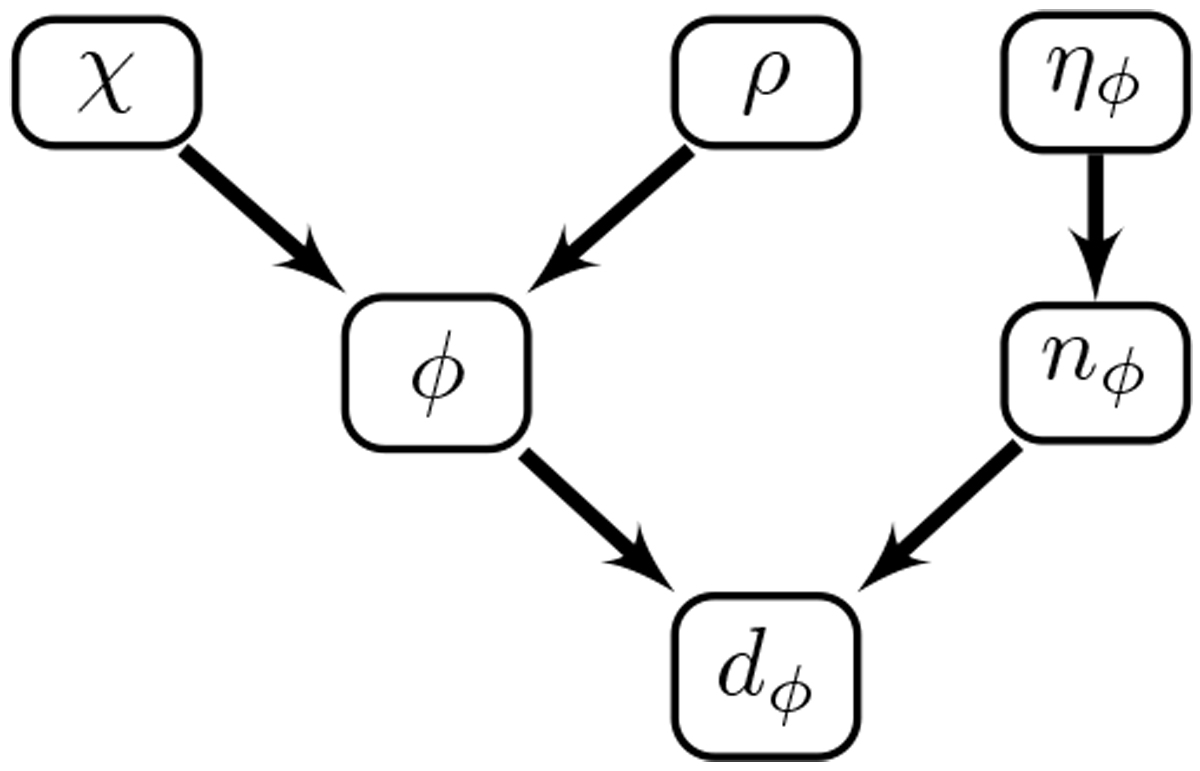
Hierarchical Bayesian model for reconstruction II. We decompose the Faraday depth ϕ into the fields χ and ρ, which are supposed to capture the sign and the overall amplitude of the signal, respectively (see Eq. (8)). The Faraday depth field ϕ together with the measurement noise nϕ determine the observed data dϕ via Eq. (4). The noise nϕ of every measurement i is assumed to be drawn from a Gaussian with variance ![]() , where σi is the reported uncertainty and ηi an unknownuncertainty correction factor.
, where σi is the reported uncertainty and ηi an unknownuncertainty correction factor.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.