Fig. 2
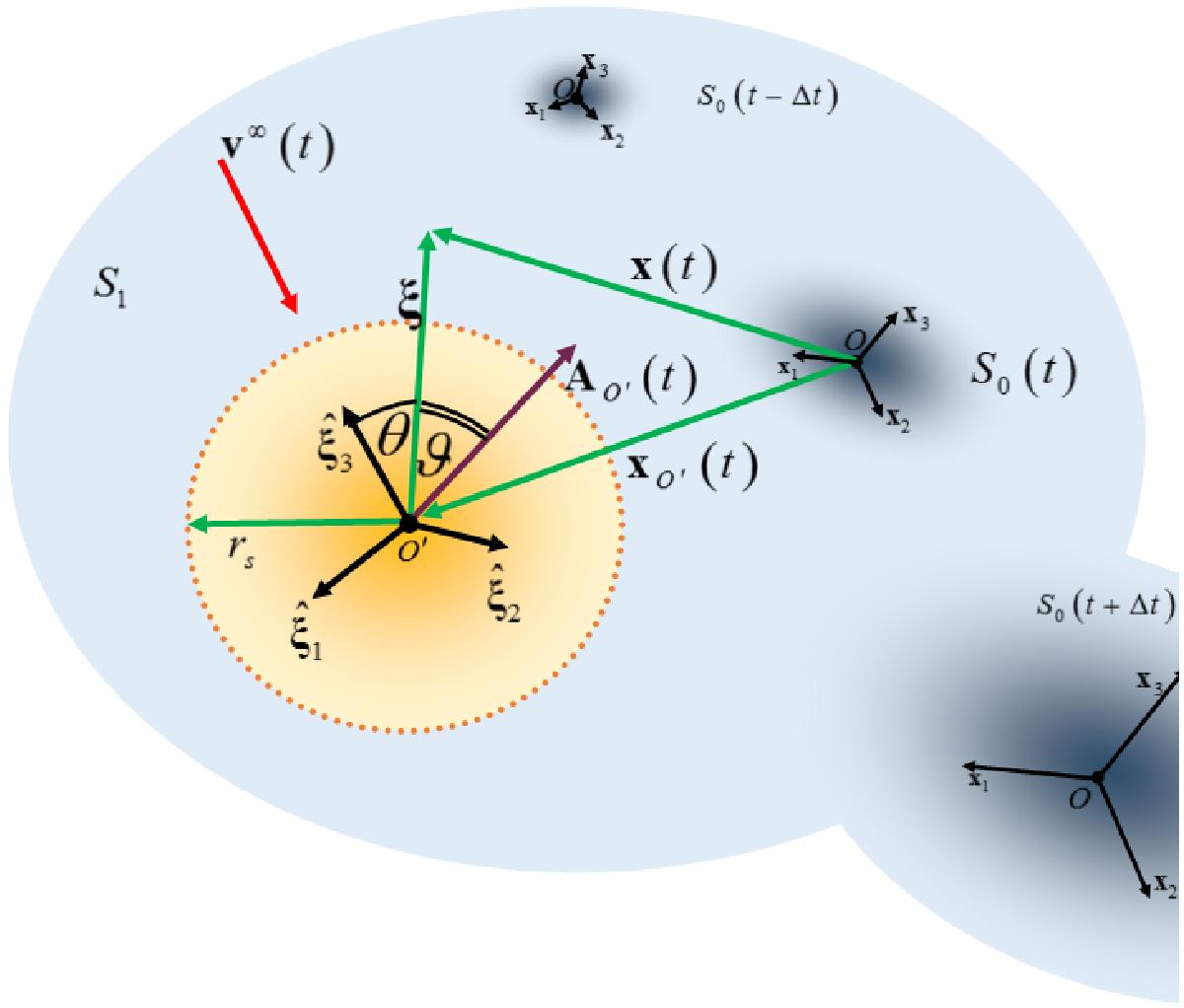
Geometrical framework as seen by an observatory comoving with S1. The position vector ξ, the position vector of S0, x(t) and the position of S1 in S1, xO′(t), are shown in green. Here the system attached to the reference frame S1 has been zoomed to show the quantities defined in the text better, but it is supposed to be the smaller in mass and dimension and is orbiting around an inertial major system attached to S0. The blue shadow represents the generic external environment attached to S0-system in which the S1-system is embedded. The position vector of S0, once at the surface of the galaxy, Σ, take the scale radius value ∥ ξ ∥ Σ = rs (doted red orange circle). The scale radius is generally a function of time rs = rs(t) and it varies as a consequence of the gravitational external field that the galaxy experiences along its orbit around the major galaxy centred in S0. In the non-inertial reference frame, S1 the velocity v = v(t) (red arrow aligned with ![]() ) of the fluid impacting the galaxy (i.e. the negative of the velocity of the stellar system in S0) forms an angle θ with the position vector ξ,
) of the fluid impacting the galaxy (i.e. the negative of the velocity of the stellar system in S0) forms an angle θ with the position vector ξ, ![]() (with
(with ![]() notation for the smaller angle between two, three-dimensional vectors). The acceleration (violet arrow) inclusive of the apparent effect forced due to the non-inertial character of S1 forms an angle
notation for the smaller angle between two, three-dimensional vectors). The acceleration (violet arrow) inclusive of the apparent effect forced due to the non-inertial character of S1 forms an angle ![]() with the position vector. An observer comoving with S1 sees the inertial reference frame S0 changing position at different times t − Δt,t or t + Δt as well as the rotation of S0 axes.
with the position vector. An observer comoving with S1 sees the inertial reference frame S0 changing position at different times t − Δt,t or t + Δt as well as the rotation of S0 axes.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.